 利用图像处理板避障 让小型飞行器像昆虫一样灵巧
利用图像处理板避障 让小型飞行器像昆虫一样灵巧
许多小型化的飞行器类似于昆虫,凭借其机动、灵活、体积小的特点能够在复杂的环境中执行飞行任务。
但是再精细化的操控,也难以做到完全避免障碍物的阻碍,因此可以采用AI图像处理板来辅助避障。
AI避障中很重要的一点是要对环境进行自动化的识别。利用高性能的AI图像处理板,再定制化目标识别检测的算法,通过对飞行环境的大量深度学习,就能够让飞行器AI愈发聪明,能够快速识别判断摄像头范围内的物体,从而实现避障的操作。
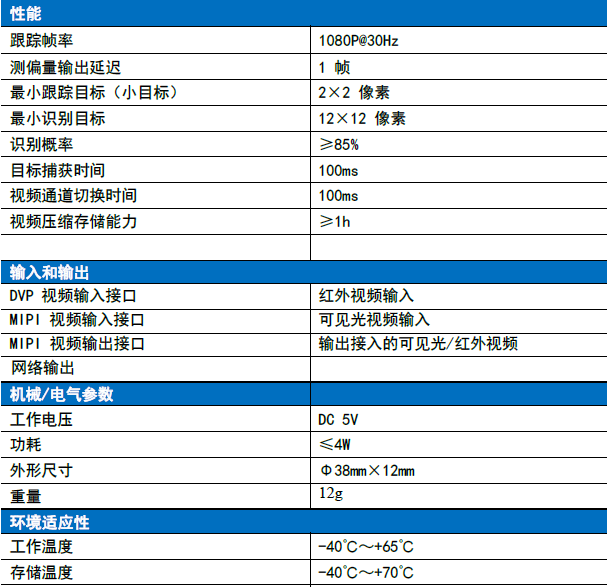
为了满足这样小型化飞行器的需求,成都慧视开发了同样是小型化体积的AI图像处理板Viztra-LE026,这块板卡采用了瑞芯微高性能芯片RV1126,体积小、功耗低,用在小型无人机上不会过多增加能耗、重量负担。
而4核处理器,支持INT8和INT16,能够输出最大2.0TOPS的算力,足以满足在复杂环境中快速进行识别检测。
Viztra-LE026参数
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表德赢Vwin官网
网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
图像处理
+关注
关注
27文章
1289浏览量
56720 -
AI
+关注
关注
87文章
30726浏览量
268870 -
飞行器
+关注
关注
13文章
722浏览量
45497
发布评论请先 登录
相关推荐
传感器在低空经济中的应用
低空经济的崛起为传感器技术带来了巨大的发展机遇。传感器作为低空飞行器的“眼睛”和“耳朵”,负责收集外部环境的信息,是实现飞行器自主导航、避

使用RTT studio的时候无法像keli这些开发工具一样动态刷新监视的变量值,怎么处理才能显示?
大神们,我发现在使用RTT studio的时候无法像keli这些开发工具一样动态刷新监视的变量值,不知道怎么处理才能显示?
发表于 07-04 07:35
解读工业机器人避障常用的视觉传感器、激光传感器、红外传感器、超声波传感器
移动机器人需要通过传感器实时获取周围的障碍物信息,包括尺寸、形状和位置信息,来实现避障。避障使用的传感

AGV小车使用避障雷达
步骤和要点: 确定雷达类型:根据AGV小车的具体需求和运行环境,选择适合的避障雷达类型,如激光雷达、超声波雷达等。 安装位置选择:根据雷达的特性和AGV小车的结构,选择合适的安装位置。一般来说,雷达应安装在AGV小车的前部或侧部
上海峰飞航空领先全球低空飞行器领域,展望2040年
eVTOL(Electric Vertical Take-Off and Landing)是一种电力驱动的垂直起降飞行器,常被誉为“飞行汽车”,主要满足城市内、城市间的短途飞行需求。
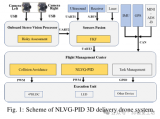
基于非线性自适应学习控制器的四轴飞行器避障方案
这篇文章的基本原理是通过设计一种新颖的非线性自适应学习控制器,用于快递四轴飞行器的障碍物避免轨迹控制问题。该控制器结合了非线性可变增益(NLVG)函数和极值搜索(ES)算法,以适应无人
发表于 04-10 12:39
•411次阅读
如何把外部SRAM像内部RAM一样分配变量?
各位大神,外部SRAM怎样配置才能像内部SRAM一样分配变量,要编译器分配。我使用的是GCC,SRAM现在可以读写,但是就是不知道怎么修改链接脚本和启动文件。
发表于 04-08 08:32
使用RTT studio的时候无法像keli这些开发工具一样动态刷新监视的变量值,怎么处理才能显示?
大神们,我发现在使用RTT studio的时候无法像keli这些开发工具一样动态刷新监视的变量值,不知道怎么处理才能显示?
发表于 02-22 08:00
二维图片框 在 鼠标处 滚轮 缩放 图片,像 CAD 一样,,
大家好,如何实现,二维图片框 在 鼠标处 滚轮 缩放 图片,像 CAD 一样,,*附件:图片在鼠标处缩放.rar
发表于 01-07 21:02
有哪些可以用于避障感应的红外发射接收管?
有哪些可以用于避障感应的红外发射接收管? 避障感应是一种常见的应用于机器人、自动驾驶、安防等领域的技术,其核心是





 工商网监
工商网监
评论