 工业机器人分类的关键因素是什么?有哪几类?
工业机器人分类的关键因素是什么?有哪几类?
数百万台工业机器人活跃在世界各地的工业 4.0 工厂中,用于提高生产率、改善质量、降低成本,以及支持更加灵活和可持续的运营。鉴于工业机器人的重要性,国际标准化组织 (ISO) 制定了标准 8373:2021《机器人词汇》,以定义机器人行业使用的术语,并为讨论各种类型的机器人及其应用提供通用语言。
国际机器人联合会 (IFR) 使用 ISO 8373:2021 中定义的关键术语,并根据机器人的机械结构确定了六种机器人分类,包括:
· 关节
· 笛卡尔坐标
· 圆柱坐标
· 并联/三角洲
· 极坐标
· SCARA
本文回顾了 ISO 8373:2021,探讨了定义机器人的四个关键术语,重点介绍了可重复编程的必要性,以及 IFR 在确定机器人分类时使用的机器人关节的类型和数量。然后,本文深入探讨了各种机器人分类的细节和细微差别,并介绍了若干家制造商的典型机器人。在此过程中,本文还介绍了并不符合所有 ISO 要求但被称为机器人的系统。
ISO 8373:2021 将工业机器人定义为一种“自动控制、可重复编程、多用途的操作装置,可对三个或三个以上轴进行编程,既可固定在原地,又可固定在移动平台上,用于工业环境中的自动化应用”。
可重复编程性是关键的区分因素。有些工业机器可能有操作装置,并且可进行多轴移动,能够处理特定任务,如在饮料灌装线上拾取瓶子并将其放入箱子中。但是,如果机器只能用于单一目的,不能重复编程,那它就不是机器人。ISO 8373 对“可重复编程”的定义是“在设计上无需物理变更即可更改已编程的运动或辅助功能”。
机器人关节的类型和数量
ISO 8373 定义了两种机器人关节:
· 棱柱关节,或滑动关节,这是两个杆件之间的组件,可使其中一个杆件相对于另一个杆件做直线运动。
· 回转关节,或旋转关节,这是连接两个杆件的组件,可使其中一个杆件相对于另一个杆件绕固定轴旋转。
IFR 使用这些定义和其他 ISO 8373 定义,并根据机械结构或拓扑结构确定了六种工业机器人分类。此外,不同的机器人拓扑结构有不同的轴数,因此关节数也不同。
轴数是工业机器人的一个关键特征。轴数和轴类型决定了机器人的运动范围。每个轴代表一个独立运动或自由度。自由度越多,机器人就越能在更大、更复杂的空间中移动。有些机器人类型有固定的自由度数,而有些则可以有不同的自由度数。
末端执行器,在 ISO 8373 中也称为末端工具 (EOAT) 或“多用途操作装置”,是大部分机器人的另一个重要组成部分。末端执行器种类繁多,包括夹持器、专用加工工具(如螺丝刀、喷漆枪或焊枪)以及传感器(包括摄像头)。它们可以是气动、电动或液压的。一些末端执行器可以旋转,这为机器人提供了另一个自由度。
下文首先介绍每种机器人拓扑结构的 IFR 定义,然后探讨它们的功能和应用。
关节机器人有三个或更多回转关节。
这是机器人的一个大类。关节机器人可以有十个或更多轴,最常见的是六个轴。六轴机器人可在 x、y 和 z 平面移动并进行俯仰、偏航和翻滚旋转,这使其能够模仿人类手臂的运动。
它们的有效载荷能力范围也很广,从不足 1 kg 到超过 200 kg 不等。这些机器人的可及范围也有很大差异,从不足 1 米到数米不等。例如,KUKA 的 KR 10 R1100-2 是一款六轴关节机器人,其最大可及范围为 1,101 mm,最大有效载荷为 10.9 kg,位姿重复性为 ±0.02 mm(图 1)。这款机器人还具有高速移动、短循环时间的特点,并有集成的能源供应系统。

图 1:位姿重复性为 ±0.02 mm 的六轴关节机器人
关节机器人可以永久地安装在地面、墙壁或天花板上,还可以安装在地面或空中的轨道上、自主移动机器人或其他可移动平台的顶部,并且可以在工作站之间移动。
它们可用于执行各种任务,包括物料搬运、焊接、喷漆和检查。关节机器人是实现与人类协同工作的协作机器人 (cobot) 的最常见拓扑结构。传统机器人是在有安全屏障的安全笼里工作,而协作机器人则是专为与人密切交互而设计。例如,Schneider Electric 的 LXMRL12S0000 协作机器人的最大可及范围为 1,327 mm,最大有效载荷为 12 kg,位姿重复性为 ±0.03 mm。为了提高安全性,协作机器人通常具有防撞、圆角边缘、力限制和重量轻的特点。
笛卡尔坐标机器人(有时也称为直角坐标机器人、线性机器人或龙门机器人)的操作装置有三个棱柱关节,其轴构成一个笛卡尔坐标系。
改良型笛卡尔坐标机器人有两个棱柱关节。尽管如此,它们仍不符合 ISO 8373 的要求,即必须“可对三个或三个以上轴进行编程”,因此从技术角度来讲,它们并不属于机器人。
配置三个棱柱关节的方法不止一种,因此配置笛卡尔坐标机器人的方法也不止一种。在基础的笛卡尔拓扑结构中,所有三个关节均成直角,其中一个关节沿 x 轴运动,与沿 y 轴运动的第二个关节相连,而第二个关节又与沿 z 轴运动的第三个关节相连。
虽然龙门拓扑结构经常被用作笛卡尔坐标机器人的同义词,但两者并不完全相同。与基础的笛卡尔坐标机器人一样,龙门机器人支持三维空间中的线性运动。但是,龙门机器人配置有两个机座 x 轴导轨、一个横跨两个 x 轴的支撑 y 轴导轨,以及一个与 y 轴相连的悬臂式 z 轴。例如,Igus 的 DLE-RG-0012-AC-800-800-500 是一款龙门机器人,工作区域为 800 mm x 800 mm x 500 mm,最多可承载 5 kg,移动速度可达 1.0 m/s,重复性为 ±0.5 mm(图 2)。
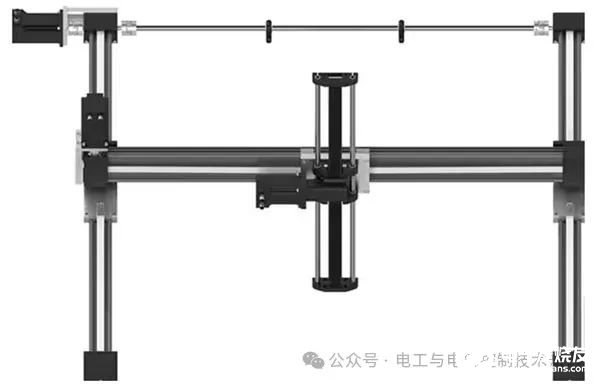
图 2:工作空间为 800 mm x 800 mm x 500 mm 的龙门机器人
圆柱坐标机器人的操作装置具有至少一个回转关节和至少一个棱柱关节,其轴构成一个圆柱坐标系。
圆柱坐标机器人结构相对简单且紧凑,运动范围有限,因此易于编程。与更复杂的同类产品相比,它们并不常见。不过,它们特别适用于磨削加工、码垛、焊接(尤其是点焊)和物料搬运等应用,例如在集成电路制造操作中将半导体晶圆装入晶圆匣中或从其中卸载(图 3)。

图 3:此圆柱坐标机器人有一个回转和棱柱关节
圆柱坐标机器人的移动速度通常为 1 至 10 m/s,可设计用于搬运重物。这种机器人可应用于汽车、制药、食品饮料、航空航天、电子和其他行业。
并联/三角洲机器人是一种机械臂上的杆件构成闭环结构的操作装置。
其他机器人(如圆柱或笛卡尔拓扑结构)以其运动方式而命名,而三角洲机器人则是以其倒三角形状而命名。三角洲机器人有 2 至 6 个轴,其中 2 轴和 3 轴设计最为常见。与 2 轴笛卡尔坐标机器人一样,2 轴三角洲机器人从技术角度来说也不符合 ISO 8373 的要求,不能称为机器人。
三角洲机器人的设计追求的是速度,而非力量。它们安装在工作区域上方,可执行取放、分类、拆卸和包装等功能。通常位于输送机上方,用于在生产线上移动部件。夹持器与细长的机械连杆相连。这些连杆连接至机器人机座上的三四个大型电机。连杆的另一端连接至安装 EOAT 的工装板上。
Igus 的 RBTX-IGUS-0047 是 3 轴三角洲机器人的一个示例。它的工作空间直径为 660 mm,最大负载为 5 kg。搬运 0.5 kg 货物时,它每分钟可执行 30 次拾取操作,最大速度为 0.7 m/s,加速度为 2 m/s2。其重复性为 ±0.5 mm(图 4)。

图 4:三轴三角洲机器人和控制器(左)
极坐标机器人(球坐标机器人)是一种具有两个回转关节和一个棱柱关节的操作装置,其轴构成一个极坐标系。
其中一个回转关节可使极坐标机器人围绕从机座向上延伸的垂直轴旋转。第二个回转关节与第一个回转关节成直角,可使机械臂上下摆动。最后,棱柱关节可使机械臂从垂直轴伸出或缩回。
极坐标机器人虽然结构简单,但与其他拓扑结构(如关节坐标、笛卡尔坐标和 SCARA 机器人)相比,下述缺点限制了其使用:
· 球坐标系使编程更为复杂。
· 与其他类型的机器人相比,其有效载荷能力通常更为有限。
· 它们比其他机器人慢。
极坐标机器人的主要优点是工作空间大、精度高。它们可用于机床操作、装配作业、汽车装配线的物料搬运,以及气焊和电弧焊。
SCARA 机器人的名称取自“Selectively Compliant Arm for Robotic Assemblies(用于机器人组件的选择性柔顺机械臂)”的首字母,是一种具有两个平行回转关节、能够在所选择的平面内提供柔顺性的操作装置。
基础 SCARA 机器人有三个自由度,第三个自由度来自旋转末端执行器。SCARA 机器人还可额外增加一个回转关节,总共可有四个自由度,因而能够实现更复杂的运动。
SCARA 机器人通常用于需要高速度和高精度的取放或装配应用。例如,Dobot 的 M1-PRO 是一款 4 轴 SCARA 机器人,其最大工作半径为 400 mm,最大有效载荷为 1.5 kg,重复性为 ±0.02 mm。具有无传感器碰撞检测和拖动示教编程功能,因此既可用作协作机器人,又可用作独立机器人(图 5)。

图 5:重复性为 ±0.02 mm 的四轴 SCARA 机器人
总结
所有工业机器人均符合 ISO 8373 的要求,可通过可重复编程的多用途操作装置进行自动控制。但是,并非每种设计都具有特定拓扑结构的固定轴数。三角洲和笛卡尔坐标机器人的轴数少于规定的轴数,而有些 SCARA 机器人的轴数则多于 IFR 规定的轴数。

图 6:CRT-DMC600M运动控制系统
-
工业机器人
+关注
关注
91文章
3360浏览量
92622 -
工业4.0
+关注
关注
48文章
2012浏览量
118593
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论