 伺服控制系统在喷绘机中的应用
伺服控制系统在喷绘机中的应用
伺服系统是自动控制系统的重要组成部分,它的性能优劣直接决定与影响着自动控制系统的快速性、稳定性和精确性,机、电、液的组合成为目前工业自动化的主要技术基础。伺服控制系统用来精确地跟随或复现某个过程的反馈控制系统。在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角)。伺服系统的结构组成和其他形式的反馈控制系统没有原则上的区别。伺服系统的主要任务是按照控制命令要求,对信号进行变换、调控和功率放大等处理,使驱动装置输出的转矩、速度及位置都能灵活方便的控制。
由于伺服电机响应快,速度高,并且定位精度高的特点,现在喷绘机普遍选用这一类电机作为送布电机和小车板控制电机。随着喷绘市场对喷绘精度和喷绘速度的不断追求,UV平板喷绘机将逐渐被推向市场。随着UV平板喷绘机的发展,配套的伺服电机也将升级换代。在中高端的喷绘机市场上将以交流伺服电机系统为主。所以很多广告客户最终选择喷绘。为迎合国内市场,部分生产厂家开始在引进国外先进技术的基础上研发生产自主品牌的喷绘机。
1喷绘机工艺及原理
1.1喷绘机工艺
喷绘机是运用一种鸣PZT的半导体压电晶体资料,在它上面制造一系列的极微细小的通道,再由它发生的机械效应将墨点激射而出。在PZT的出产入程中,它经由极性化处置:物料的原子电荷被强行按指定的方向排列。这是一个非常要害的特性,因为当外接电场效应附加在经由极性化的资料上时,依据它的方向定义,它会令PZT发生一个物理性的变形,而就是这种现像,授于了一个喷射的才能。送布电机要求能够正反转,进布和退布速度保持平稳,在停机时自动锁死,防止布滑落。小车板电机要求在移动过程中稳定无振动,小车板静止时保持力度足够大。
对于喷头轴和进布轴伺服性能的要求主要是伺服系统有较高的动态响应及较高的定位精度。全数字交流伺服驱动器有着高速度频率响应,具有共振抑制功能,可以精确调谐,消除震动;控制精度可以达到1个脉冲,最大的输入频率可以达到250Kpps,这都很好的保证了进布轴所需驱动的要求。对于主轴伺服要求有快速的启停特性和稳定的速度控制,全数字交流伺服驱动器具有开放式的参数调整接口,可以根据用户的使用情况进行参数的设置。
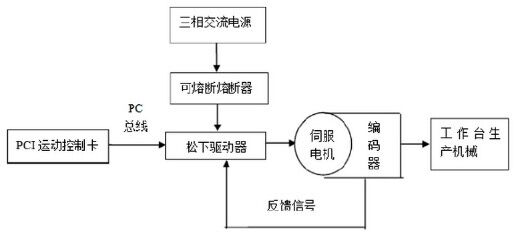
图1喷绘机原理图
1.2.1运动控制卡
运动控制卡是一种上位控制单元,可以控制伺服电机,是基于PC总线,利用高性能微处理器(如DSP)及大规模可编程器件实现多个伺服电机的多轴协调控制的一种高性能的步进/伺服电机运动控制卡包括脉冲输出、脉冲计数、数字输入、数字输出、D/A输出等功能,它可以发出连续的、高频率的脉冲串,通过改变发出脉冲的频率来控制电机的速度,改变发出脉冲的数量来控制电机的位置,它的脉冲输出模式包括脉冲/方向、脉冲/脉冲方式。脉冲计数可用于编码器的位置反馈,提供机器准确的位置,纠正传动过程中产生的误差。数字输入/输出点可用于语限位、原点开关等。产品广泛应用于工业自动化控制领域中需要精确定位、定长的位置控制系统和基于PC的NC控制系统。具体就是将实现运动控制的底层软件和硬件集成在一起,使其具有伺服电机控制所需的各种速度、位置控制功能。这些功能能通过计算机方便地调用。
运动控制卡不仅要发送脉冲给电机驱动器,同时接受伺服电机编码器反馈的脉冲数,还接受光栅尺反馈信号,进而控制伺服电机的转速。伺服驱动器既要与运动控制卡有数据线连接,其本身还要连接插座电源。
如果你的运动控制卡时比较好的卡,伺服刷新率可以达到要求,可以把编码器反馈直接接到运动控制卡,形成一个整体的闭环。若对对精度有很高的要求可以用双闭环,运动控制卡就是根据要求x-y平台运行的位置,控制电机运动到准确的位置。
1.2.2PC总线
现有的放开式数控系统实现方案主要采用PC机和数控系统结合的方法,PC机作为上位机实现较为复杂的网络通信,人机交互等功能,数控系统作为下位机将上位机输入的运行参数经过处理交给执行部件执行,同时将检测系统的反馈信息上传给上位机实现实时监控,各个模块之间协调工作互不干扰,给系统升级带来了方便。
放开式系统动态控制器的核心是DSP,它具有运算速度快,支持复杂运动算法的特点,可以满足高精度运动控制的要求,因此,以DSP为核心的多轴动态控制卡越来越广泛地应用在运动控制系统中,将多轴动态控制卡插在PC机扩展槽上,就可以组成高精度运动控制系统,位置反馈信号的采集、闭环控制计算及控制量的输出均由动态控制卡完成,极大的提高了运算速度和控制响应速度,将工控机的资源从烦琐的数据采集和计算中解决出来,从而可以更好的实施整个控制系统的管理。
1.2.3驱动器
伺服驱动器是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达。目前主流的伺服驱动器均采用数字信号处理器(DSP)作为控制核心,可以实现比较复杂的控制算法,事项数字化、网络化和智能化。功率器件普遍采用以智能功率模块(IPM)为核心设计的驱动电路,IPM内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路,在主回路中还加入软启动电路,以减小启动过程对驱动器的冲击。功率驱动单元首先通过三相全桥整流电路对输入的三相电或者市电进行整流,得到相应的直流电。经过整流好的三相电或市电,再通过三相正弦PWM电压型逆变器变频来驱动三相永磁式同步交流伺服电机。功率驱动单元的整个过程可以简单的说就是AC-DC-AC的过程。整流单元(AC-DC)主要的拓扑电路是三相全桥不控整流电路。
伺服驱动器一般可以采用位置、速度和力矩三种控制方式,主要应用于高精度的定位系统,目前是传动技术的高端。编码器(encoder)是将信号或数据进行编制、转换为可用以通讯、传输和存储的信号形式的设备。
驱动器是一个驱动放大元件,只是把上位机(如运动控制卡)发来的一些信号进行放大,以致使电机可以运转起来。MAC系列运动控制卡是基于总线的电机运动控制卡。采用专用控制芯片为核心器件,输入输出信号均为光电隔离,可与各种类型的步进电机驱动器连接,驱动步进电机,构成高精度位置控制系统或调速系统。可与PC机构成主从式控制结构:PC机负责人机界面的管理和其它管理工作;而控制卡负责运动控制方面的所有细节。用户通过我们提供的动态链接库可方便快速的开发出自己需要的运动控制功能。图2为伺服驱动器结构图
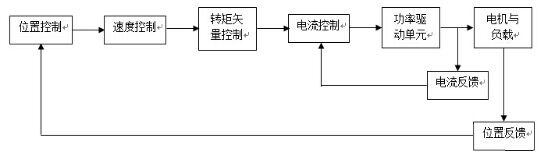
图2伺服驱动器结构图
2、伺服控制系统设计
机电一体化的伺服控制系统的结构,类型繁多,但从自动控制理论的角度来分析,伺服控制系统一般包括控制器,被控对象,执行环节,检测环节,比较环节等五部分。
比较环节
比较环节是将输入的指令信号与系统的反馈信号进行比较,以获得输出与输入间的偏差信号的环节,通常由专门的电路或计算机来实现。
控制器
控制器通常是计算机或PID控制电路,其主要任务是对比较元件输出的偏差信号进行变换处理,以控制执行元件按要求动作。
执行环节
执行环节的作用是按控制信号的要求,将输入的各种形式的能量转化成机械能,驱动被控对象工作。机电一体化系统中的执行元件一般指各种电机或液压,气动伺服机构等。
被控对象
机械参数量包括位移,速度,加速度,力,和力矩为被控对象。
检测环节
检测环节是指能够对输出进行测量并转换成比较环节所需要的量纲的装置,一般包括传感器和转换电路。
3、结论
本文设计的伺服控制系统性能优越保证了喷头的运动平稳性及准确性。在运行效果上完全可以和进口伺服系统媲美,在性价比上具有较高的优越性。此喷绘机充分结合了伺服的响应快、定位精确、运行平稳等优点。经过客户的试用,喷绘出来的图案都符合客户要求,各项指标都达到要求,同时还提高了生产效率,使客户达到最大满意度。此设备向客户充分展示了伺服控制系统的优势,同时也提高了喷绘机设备在市场上的竞争力。
福建鸿飞达主推:
霍尼韦尔 测厚仪备件/施耐德爱乐系列伺服驱动器 LXM ,BMX模块 ,140/TSX 模块/ABB DCS模块 ,机器人备件,IGBT模块 板卡 , ABB张力传感器/西门子 罗宾康 系列产品,烟气分析仪 7MB ,电机保护器3UF ,宽温系列模块6AG (做项目的客户 多推荐 走货期的),软件 6FC5851 6FC5852 /力士乐 伺服驱动器 电机/发那科 伺服驱动器 电机 /安川 伺服驱动器 电机 .
1.承接PLC控制柜,变频柜,中低压开关柜,等自动化集成系统改造、设计、安装调试;
2.维修:伺服驱动器,PLC模块,变频器,触摸屏,DCS卡件等;
3.KUKA库卡机器人维保及配件更换。
审核编辑 黄宇
-
喷绘机
+关注
关注
0文章
3浏览量
6736 -
伺服控制系统
+关注
关注
1文章
54浏览量
12251
发布评论请先 登录
相关推荐
伺服控制系统的分类方式和常见伺服控制系统介绍






 工商网监
工商网监
评论