 控制系统整定的方法和步骤
控制系统整定的方法和步骤
控制系统整定是控制系统设计和运行中的一个重要环节,它涉及到对控制系统参数的调整和优化,以实现对系统性能的改善和提升。
- 控制系统整定的概念和重要性
控制系统是现代工业生产和日常生活中不可或缺的一部分,它通过对被控对象的输入和输出信号进行处理和调节,实现对被控对象的稳定和精确控制。控制系统的性能直接影响到生产效率、产品质量和经济效益等方面。
控制系统整定是指对控制系统中的参数进行调整和优化,以实现对系统性能的改善和提升。控制系统整定的主要目的是:
1.1 提高系统的稳定性:通过整定,可以使系统在各种工况下都能保持稳定运行,避免出现振荡、失稳等现象。
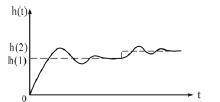
1.2 提高系统的响应速度:通过整定,可以加快系统的响应速度,缩短系统的调节时间,提高系统的动态性能。
1.3 提高系统的控制精度:通过整定,可以减小系统的控制误差,提高系统的控制精度,满足生产和生活的需求。
1.4 降低系统的能耗:通过整定,可以优化系统的运行参数,降低系统的能耗,提高能源利用效率。
1.5 提高系统的可靠性和安全性:通过整定,可以提高系统的可靠性和安全性,避免因系统故障导致的生产中断和安全事故。
- 控制系统整定的方法和步骤
控制系统整定的方法和步骤主要包括以下几个方面:
2.1 确定整定目标:根据系统的实际需求和性能指标,确定整定的目标,如稳定性、响应速度、控制精度等。
2.2 建立数学模型:对被控对象进行建模,建立数学模型,为整定提供理论依据。
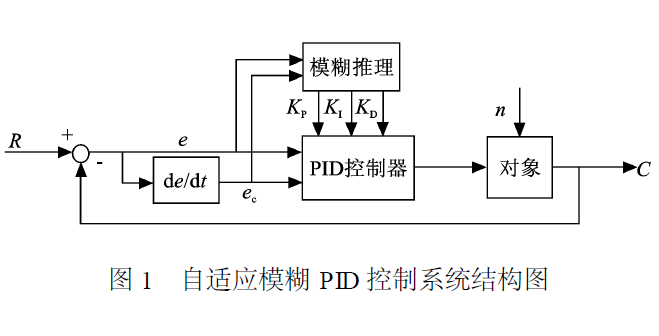
2.3 选择整定方法:根据系统的类型和特点,选择合适的整定方法,如PID整定、模糊控制整定、自适应控制整定等。
2.4 设计整定算法:根据整定方法,设计整定算法,实现对系统参数的调整和优化。
2.5 进行仿真实验:在计算机上进行仿真实验,验证整定算法的有效性和可行性。
2.6 现场调试:将整定算法应用于实际系统,进行现场调试,观察系统的性能变化,进一步优化整定参数。
2.7 评估整定效果:通过对比整定前后的系统性能,评估整定的效果,确定是否达到预期目标。
- 控制系统整定的常见问题和解决方案
在控制系统整定过程中,可能会遇到一些问题,如:
3.1 系统模型不准确:由于建模误差、参数变化等原因,导致系统模型不准确,影响整定效果。解决方案是采用更精确的建模方法,实时更新模型参数。
3.2 整定方法不适用:由于系统类型、特点等原因,导致整定方法不适用。解决方案是选择合适的整定方法,或者结合多种整定方法进行综合整定。
3.3 整定参数难以确定:由于系统复杂性、非线性等原因,导致整定参数难以确定。解决方案是采用自适应控制、模糊控制等方法,实现参数的自适应调整。
3.4 整定效果不稳定:由于系统干扰、参数漂移等原因,导致整定效果不稳定。解决方案是增加系统的鲁棒性,采用鲁棒控制、容错控制等方法。
3.5 整定过程耗时:由于整定过程复杂、计算量大等原因,导致整定过程耗时。解决方案是采用快速整定算法,提高整定效率。
- 控制系统整定的应用案例分析
控制系统整定在各个领域都有广泛的应用,如:
4.1 工业过程控制:在化工、石油、电力等行业,通过整定,可以实现对生产过程的精确控制,提高产品质量和生产效率。
4.2 机器人控制:在机器人领域,通过整定,可以实现对机器人运动的精确控制,提高机器人的灵活性和稳定性。
4.3 汽车控制:在汽车领域,通过整定,可以实现对汽车行驶的稳定控制,提高汽车的安全性和舒适性。
4.4 航空航天控制:在航空航天领域,通过整定,可以实现对飞行器的精确控制,提高飞行器的性能和可靠性。
-
控制系统
+关注
关注
41文章
6603浏览量
110573 -
PID
+关注
关注
35文章
1472浏览量
85468 -
参数
+关注
关注
11文章
1829浏览量
32194 -
输出信号
+关注
关注
0文章
280浏览量
11858
发布评论请先 登录
相关推荐







 工商网监
工商网监
评论