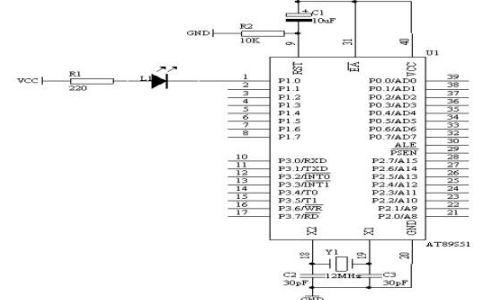
#include //程序是基于KEIL-C51编写,引入8051头文件sbit P10=P1^0; sbit P11=P1^1;unsigned int scale; //占空比控制变量void main(void) { unsigned int n; //延时循环变量 TMOD=0x02; //定时器0,工作模式2(0000 0010),8位定时 TH0=0x06; //定时250us(12M晶振) TL0=0x06; //预置值 TR0=1; //启动定时器0 ET0=1; //启动定时器0中断 EA=1; //开启总中断 while(1) { for(n=0;n<50000;n++); //延时一段时间 scale++; //占空比控制变量加一 if(scale==10) scale=0; //达到循环的效果 } } timer0() interrupt 1 //定时器0中断程序 { static unsigned int tt ; //tt用来保存当前时间在一个时钟周期的位置 tt++; //每中断一次,即每经过250us,tt的值自加1 if(tt==10) //中断10次定时2.5ms, { tt=0; //使tt=0,开始新的周期,达到循环的效果 P10=0; //点亮LED } if(scale>=tt) //如果占空比与中断次数相同时,此时输出高电平 P10=1; //熄灭LED灯 /* 前面的程序是将占空比设置成了10个等级,scale=1时维持高电平的时间 是1/10个PWM周期(这里是2.5ms),因为scale<=tt的时间段是低电平点亮LED灯的, scale>=tt的时间是熄灭LED灯的,通过改变一个周期内高低电平维持的时间长短 就可以控制LED灯的亮度或者是电机的转速了,这就是PWM的工作原理 */}
PWM原理:

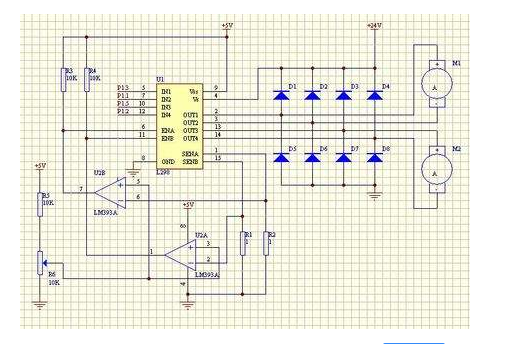
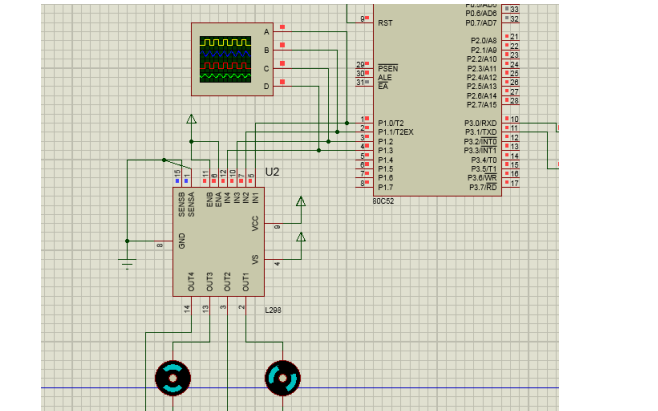
对程序稍作修改变为对电机的转速控制,在proteus8.4仿真如下:

 单片机中PWM程序工作原理图文详解
单片机中PWM程序工作原理图文详解








 工商网监
工商网监
评论