 DDS通信中间件——DCPS规范(上)
DDS通信中间件——DCPS规范(上)
DDS通信中间件——DCPS规范(上)
本篇文章继续和大家分享一下对DDS这套规范的理解。预期本系列文章将包括以下内容陆续更新:
1. DDS规范概述
2.DCPS规范解读
3. DDS-XTypes与IDL解读
4. RTPS规范解读
5. DDS安全规范解读
6. DDS-RPC规范解读
7. DDS-TSN规范解读
8. DDS-XRCE规范解读
DCPS规范分为上下两篇,本篇内容先讲模型概述、接口定义和开发示例,下篇再来讲QoS定义。
1. 概述
DCPS(Data-CentricPublish-Subscribe,以数据为中心的发布/订阅)规范是DDS系列规范最初也是最核心的规范,在某些场合DDS规范指的就是DCPS规范。
2. DCPS-PIM
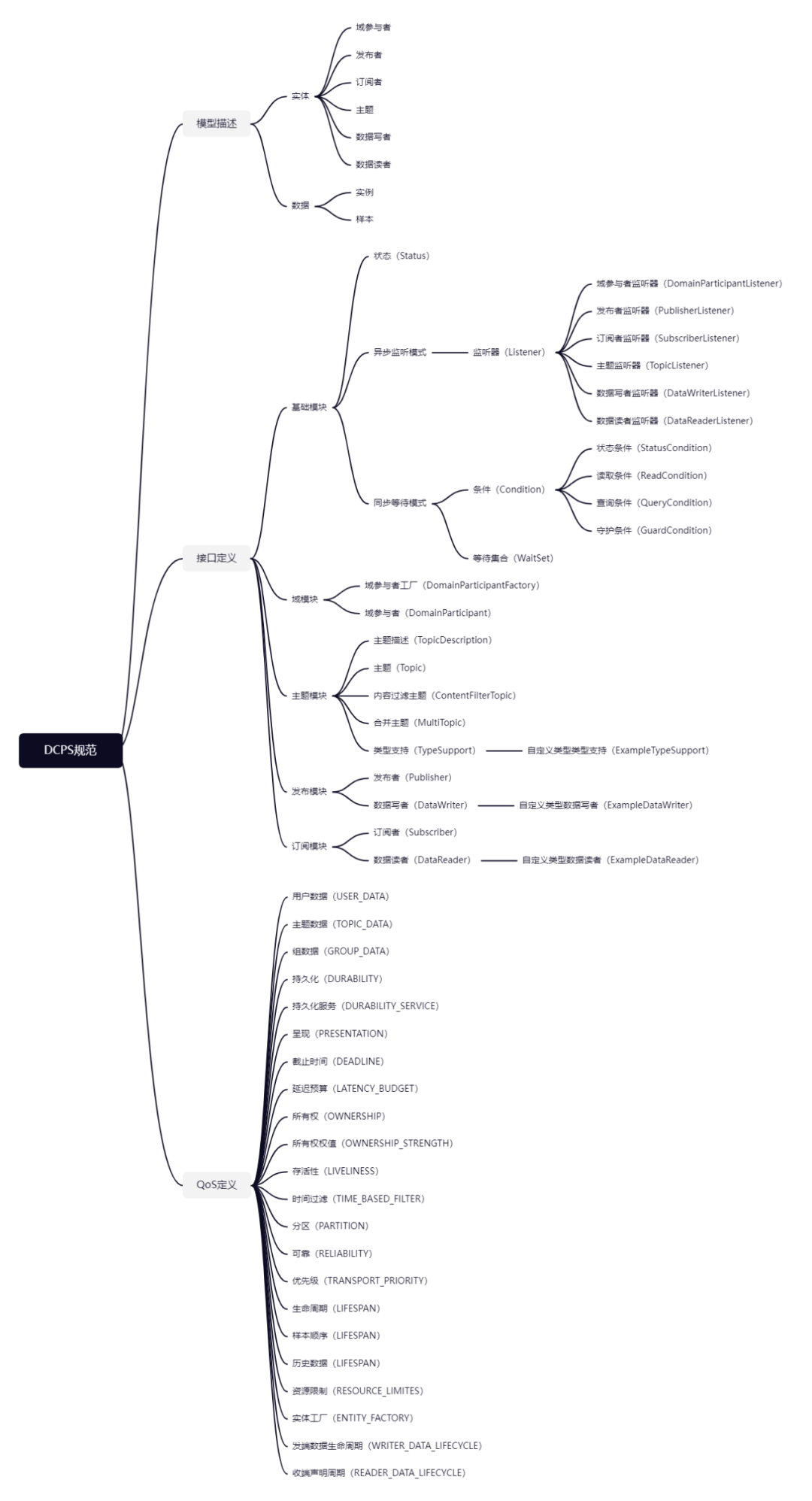
DCPS的内容总结在下面这张图中,主要分为三大块,这篇文章也将按照导图中的内容依次介绍:
- • 模型描述,介绍模型中涉及的概念;
- • 接口描述,分模块定义类并定义接口形式及接口功能描述;
- • QoS定义,定义22种QoS的功能及其配置方式。
2.1. 模型描述
2.1.1. 实体概念
- 基于主题的发布/订阅模型
- 系统的数据按照主题来分类;
- 发布端发布主题数据;
- 订阅端订阅主题数据;
- 发布端发布的主题数据后,相同主题的订阅端都能收到。
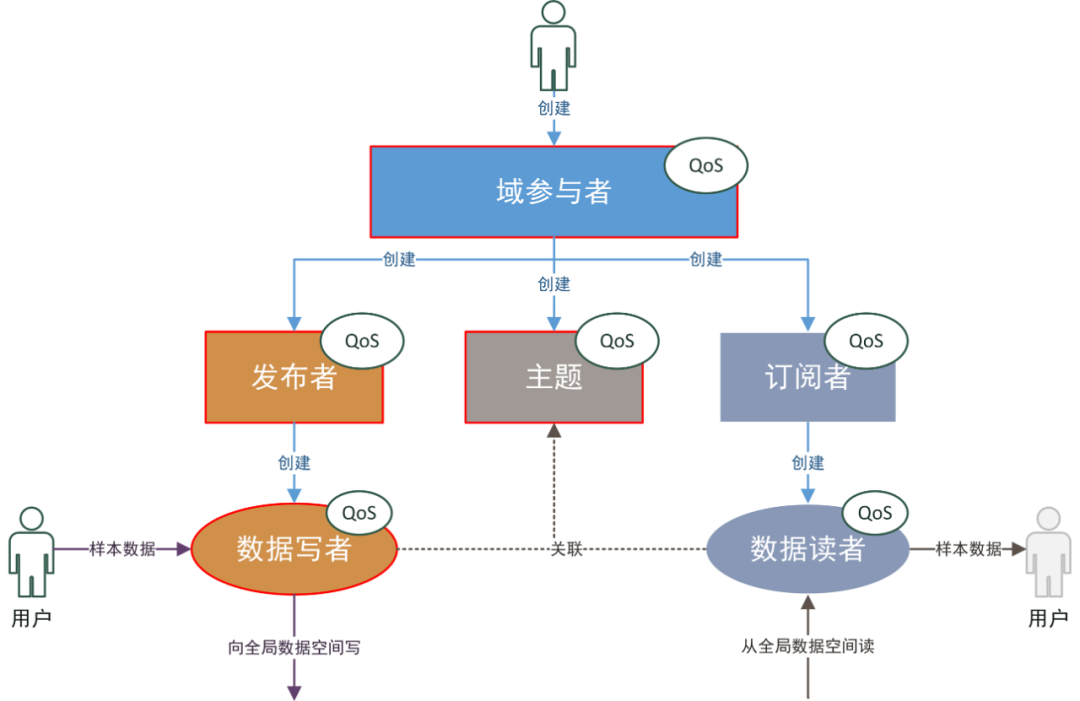
- DCPS实体模型定义了三层实体,如下图所示
- 域参与者(DomainParticipant)
- 这个实体看上去和发布/订阅模型没啥关系,实际上也没啥关系。主要是DDS里面定义域的概念用来隔离通信,相同域内实体互相通信,不同域间隔离;
- 这是应用参加DDS系统通信的入口实体,创建某个域下的域参与者表示:“我想要参与某个域进行通信(是发布还是订阅后面再告诉你)”。
- 发布者(Publisher)
- 这个最好理解,应用创建发布者表示:“我需要发布数据(具体发布什么主题数据,后面再告诉你)”;
- 订阅者(Subscriber)
- 这个也很好理解,应用创建订阅者表示:“我需要订阅数据(具体订阅什么主题数据,后面再告诉你)”;
- 主题(Topic)
- 主题用来描述一类数据,创建主题表示:“我有这么一类数据需要交互”;
- 定义主题需要什么信息,后面章节详细介绍;
- 数据写者(DataWriter)
- 数据写者关联一个且仅一个主题实体,用来向全局数据空间写指定主题的数据;
- 应用创建数据写者表示:“我需要发布XX主题数据。”
- 数据读者(DataReader)
- 数据读者关联一个且仅一个主题实体,用来从全局数据空间读指定主题的数据;
- 应用创建数据读者表示:“我需要订阅XX主题数据。”
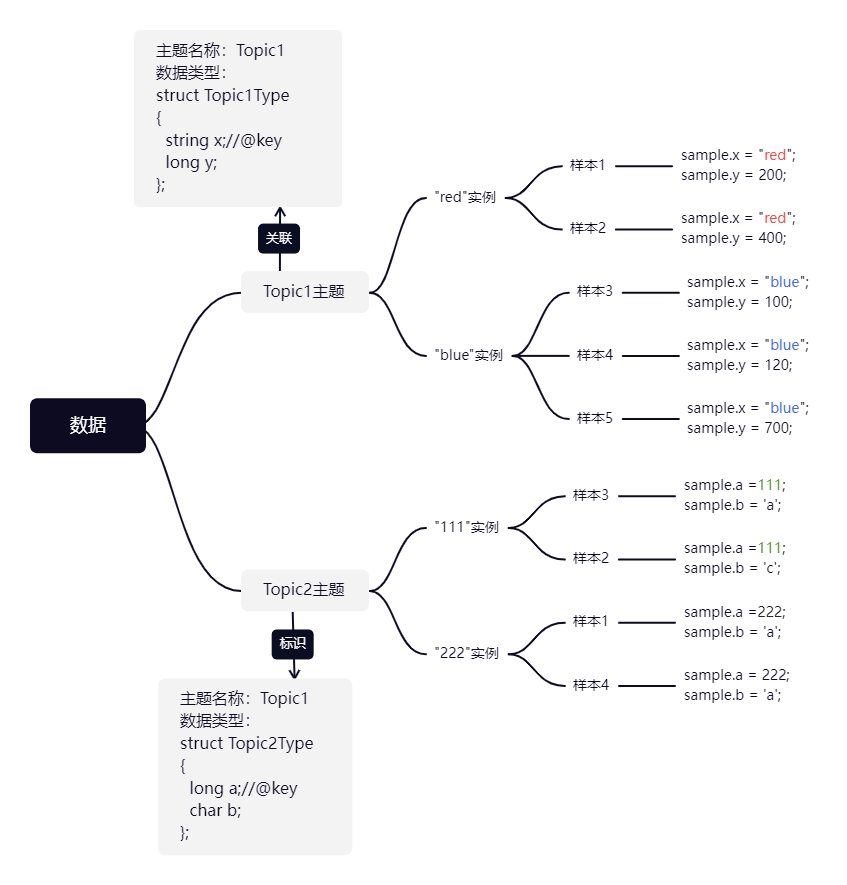
2.1.2. 数据描述
DCPS模型中有几个重要的概念来描述系统中传输的数据,如下图所示自顶向下分为三层来描述系统中交互的数据。
| 概念 | 说明 | 标识 |
|---|---|---|
| 主题 | 最大类,域内唯一的主题名称,并关联1个数据类型。 | 主题名+类型 |
| 实例 | 主题数据中key成员相同的数据的集合,即使用key成员进一步区分主题数据,可以理解成“子主题”。 | InstanceHandle_t |
| 样本 | 每次向DDS发送一次数据产生一个数据样本。 | 序列号 |
2.2. 接口描述
2.2.1. 基础模块
基础模块包含了DCPS的接口定义的几个重要的原则:
实体管理(创建/删除/查询)采用工厂模式,父实体为子实体的工厂,层级关系参见2.2.1节;
每个实体会关联一组内部的状态;
状态可以通过实体提供的查询接口查询获取;
状态可以通过监听器由底层回调获取;
状态可以通过“条件-等待”的方式同步阻塞获取;
每个实体都会关联一系列的QoS配置。
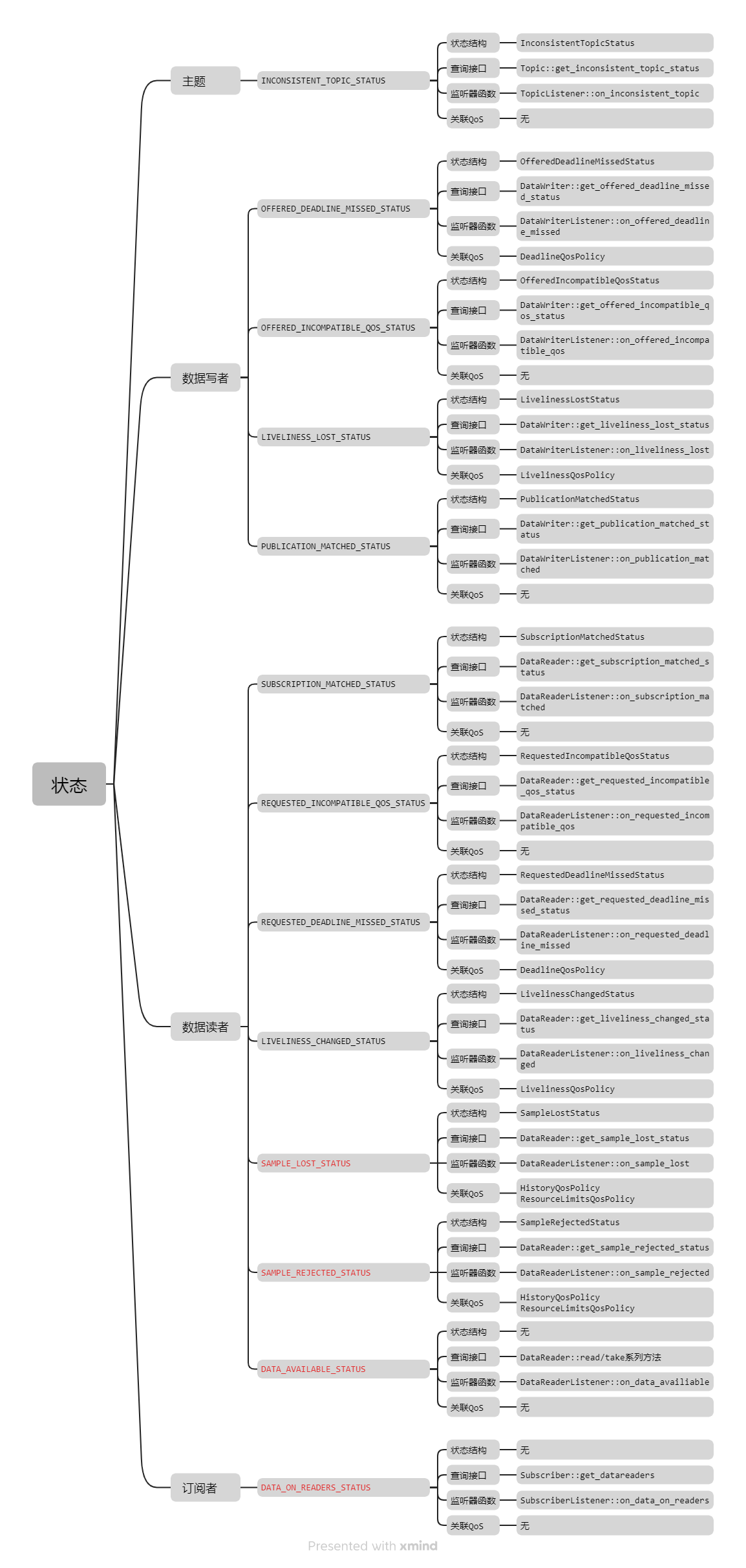
2.2.1.1. 实体状态
实体状态表示DDS为用户关心的底层事件所维护的状态,例如数据写者关联成功匹配远程数据读者、检测到数据读者数据样本丢失、检测到主题的类型不兼容等。每个实体会关联一系列的代表该实体“通信状态”的状态对象。实体关联的状态参见下图。状态结构体中包含的数值可以提供更多关于该状态的信息。
2.2.1.2. 获取实体状态
状态分为两种类型:
- 简单通信状态 :除了表明状态是否改变的标识还包含保存当前状态的对应结构体。
- 读通信状态:读通信状态更像一个事件,除了是否发生以外没有其他声明。只有两个状态是读通信状态:#DATA_AVAILABLE_STATUS 和 #DATA_ON_READERS_STATUS 。
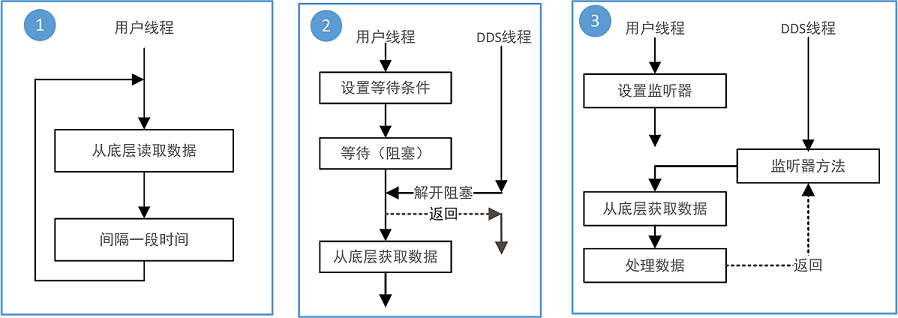
下面分别描述获取实体简单通信状态有三种方式 :
- 同步获取实体状态,参见上图最左边图,用户想要获取某个状态的当前值时,主动调用该状态有关的实体方法,获取各实体状态的实体方法参见2.2.1.1中的图;
- 同步等待并获取实体状态,参见上图中间的图,用户设置等待条件,并调用DDS接口进行阻塞等待,在DDS底层检测到该状态发生变化后,解开阻塞,用户再通过方法1获取该状态;
- 异步回调实体状态,参见上图右边的图,该方式为通过监听器异步回调状态 ,用户为实体设置相应的监听器(再进行其他的业务逻辑),DDS底层检测到该状态变化时,通过回调监听器的相应方法,用户即可获取该状态的值,各实体状态关联的回调方法参见参见2.2.1.1中的图。
2.2.1.3. 条件-等待
DDS使用条件( Condition )以及等待( WaitSet )来实现同步等待模型,其中每个条件均有一个触发状态,不同类型的状态的触发条件不一样,可以将一个或者多个条件加入到等待集合中,即允许用户同时等待多个状态的集合中的某个状态触发。条件的类型及其相关的操作参见,使用条件等待的详细例子参见:
| 说明 | 状态条件( StatusCondition ) | 读取条件 ( ReadCondition ) | 监视条件( GuardCondition ) |
|---|---|---|---|
| 简介 | 该条件用于获取实体状态改变 | 该条件用于获取数据读者的数据状态改变 | 该条件用于手动解开阻塞的条件集合 |
| 获取方式 | 每个实体均会关联一个该条件,调用 Entity::get_statuscondition 方法获取 | 由数据读者作为该条件的工厂, DataReader::create_readcondition 、 DataReader::delete_readcondition | 用户负责状态的生命周期管理 (new/delete) |
| 触发方式 | StatusCondition::set_enabled_statuses 设置的关心的状态发生改变 | 数据读者底层有该状态所表示的数据样本的时候触发 | 用户通过监视条件的接口手动设置 |
| 触发后的动作 | 首先测试发生改变的状态,再调用相应的状态获取方法获取 | 调用数据读者的读取数据方法获取改变的数据 DataReader::read_w_condition DataReader::take_w_condition | 无 |
(向左滑动)
2.2.1.4. 监听器
DDS通过监听器提供底层状态事件异步回调的机制,每个实体状态在相应的实体监听器中均有相应的回调函数与之对应,实体回调函数与实体状态的对应关系参见 2.2.1.1中的图 。下图显示了DDS中各个监听器的继承关系,即父实体的监听器继承于子类的监听器,这就意味着父实体监听器能够获取所有子实体的状态变化。

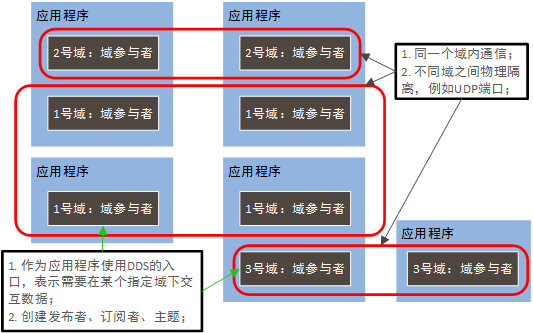
2.2.2. 域模块
在发布订阅模型中,理论上每个计算机上的中间件都需要掌握全局的节点信息,以提供分布式的数据传输服务。但在实际应用中,可能存在需要隔离的情况,例如网络中的节点数量过于庞大,掌握全局信息会付出巨大的代价,或者从属于不同分区的小组之间不希望互相干扰。为了解决隔离的问题,DDS引入了域的概念。每个参与通信的计算机都可以加入一个或多个域,相同域内的节点可以互相通信,不同域之间的节点则不会有数据交互。DDS中使用 DomainId_t 来唯一标识一个域。域参与者实体是DDS的入口,用户创建一个域参与者表示该程序想要在指定的域中交互数据。域模型示意图参见下图,一个应用程序可以在多个域中交互数据。
2.2.2.1. 域参与者工厂
域参与者实体的工厂为全局单例的域参与者工厂( DomainParticipantFactory ),域参与者工厂的主要功能参见下表。
| 功能 | 接口 |
|---|---|
| 单例管理 | DomainParticipantFactory::get_instance |
| DomainParticipantFactory::finalize_instance | |
| 作为域参与者的工厂 | DomainParticipantFactory::create_participant |
| DomainParticipantFactory::delete_participant | |
| DomainParticipantFactory::lookup_participant | |
| DomainParticipantFactory::get_default_participant_qos | |
| DomainParticipantFactory::set_default_participant_qos | |
| 自身QoS管理 | DomainParticipantFactory::set_qos |
| DomainParticipantFactory::get_qos |
(向左滑动)
2.2.2.2. 域参与者
域参与者( DomainParticipant ),主要接口的功能参见下表,此外,域参与者内部还实现发现协议、根据线程模型配置初始化线程、创建定时器、申请并创建网络传输需要的资源,并监听对应的网络端口,负责处理网络报文等,域参与者所需的资源较多,内部逻辑复杂,因而在一个应用中应尽可能的减少域参与者的创建。
| 功能 | 接口 |
|---|---|
| 实体功能 | DomainParticipant::enable |
| DomainParticipant::set_listener | |
| DomainParticipant::get_listener | |
| DomainParticipant::set_qos | |
| DomainParticipant::get_qos | |
| DomainParticipant::get_instance_handle | |
| DomainParticipant::get_status_changes | |
| DomainParticipant::get_statuscondition | |
| 作为实体工厂 | DomainParticipant::delete_contained_entities |
| DomainParticipant::contains_entity | |
| 作为主题实体工厂 | DomainParticipant::create_topic |
| DomainParticipant::delete_topic | |
| DomainParticipant::get_default_topic_qos | |
| DomainParticipant::set_default_topic_qos | |
| DomainParticipant::lookup_topicdescription | |
| DomainParticipant::find_topic | |
| DomainParticipant::create_contentfilteredtopic | |
| DomainParticipant::delete_contentfilteredtopic | |
| 作为发布者实体工厂 | DomainParticipant::create_publisher |
| DomainParticipant::delete_publisher | |
| DomainParticipant::get_default_publisher_qos | |
| DomainParticipant::set_default_publisher_qos | |
| DomainParticipant::get_publishers | |
| 作为订阅者实体工厂 | DomainParticipant::create_subscriber |
| DomainParticipant::delete_subscriber | |
| DomainParticipant::get_default_subscriber_qos | |
| DomainParticipant::set_default_subscriber_qos | |
| DomainParticipant::get_subscribers | |
| 内置实体管理 | DomainParticipant::get_builtin_subscriber |
| 通信管理 | DomainParticipant::ignore_participant |
| DomainParticipant::ignore_publication | |
| DomainParticipant::ignore_subscription | |
| 域信息查询 | DomainParticipant::get_domain_id |
| DomainParticipant::get_discovered_participants | |
| DomainParticipant::get_discovered_participant_data | |
| DomainParticipant::get_discovered_topics | |
| DomainParticipant::get_discovered_topic_data | |
| 存活性管理 | DomainParticipant::assert_liveliness |
2.2.3. 主题模块
| 功能 | 接口 |
|---|---|
| 实体功能 | Topic::enable |
| Topic::set_listener | |
| Topic::get_listener | |
| Topic::get_instance_handle | |
| Topic::get_status_changes | |
| Topic::get_statuscondition | |
| Topic::set_qos | |
| Topic::get_qos | |
| 获取主题信息 | Topic::get_type_name |
| Topic::get_name |
2.2.4. 发布模块
2.2.4.1. 发布者
| 功能 | 接口 |
|---|---|
| 实体功能 | Publisher::enable |
| Publisher::set_listener | |
| Publisher::get_listener | |
| Publisher::get_instance_handle | |
| Publisher::get_status_changes | |
| Publisher::get_statuscondition | |
| Publisher::get_participant | |
| Publisher::set_qos | |
| Publisher::get_qos | |
| 作为数据写者的工厂 | Publisher::create_datawriter |
| Publisher::delete_datawriter | |
| Publisher::lookup_datawriter | |
| Publisher::delete_contained_entities | |
| Publisher::set_default_datawriter_qos | |
| Publisher::get_default_datawriter_qos | |
| Publisher::copy_from_topic_qos | |
| 数据发布控制 | Publisher::begin_coherent_changes |
| Publisher::end_coherent_changes | |
| Publisher::wait_for_acknowledgments | |
| Publisher::suspend_publications | |
| Publisher::resume_publications |
2.2.4.2. 数据写者
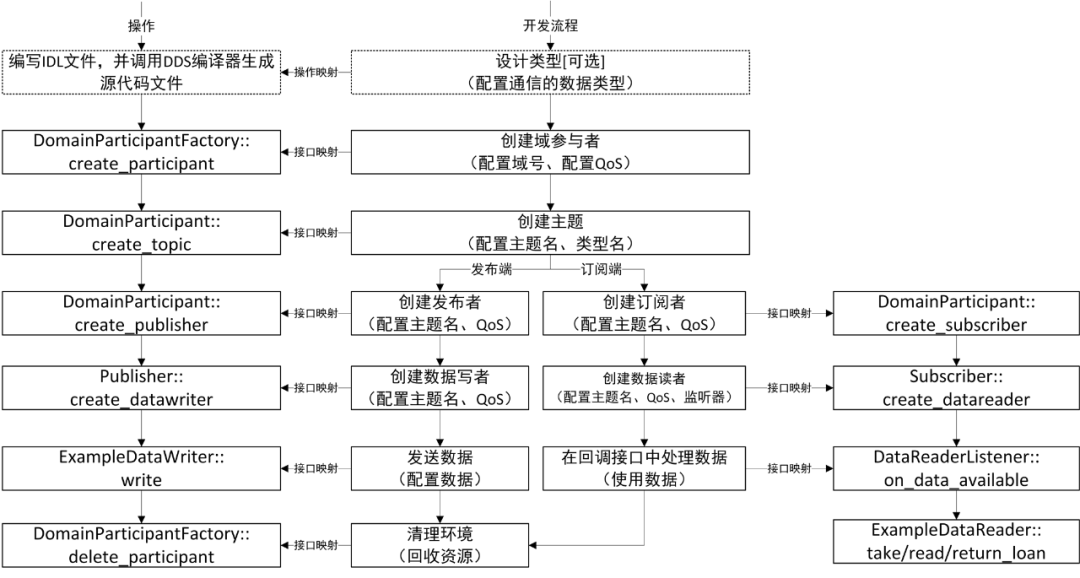
数据写者主要的功能描述参见下表,数据写者提供强类型安全的接口,该接口由DDS编译器根据IDL中定义的类型自动生成,其中类型无关的接口参见 DataWriter 、类型相关的接口参见 ExampleDataWriter 接口说明,典型的发布过程如下 。
| 功能 | 接口 |
|---|---|
| 实体功能 | DataWriter::enable |
| DataWriter::set_listener | |
| DataWriter::get_listener | |
| DataWriter::get_instance_handle | |
| DataWriter::get_status_changes | |
| DataWriter::get_statuscondition | |
| DataWriter::set_qos | |
| DataWriter::get_qos | |
| 数据发送 | ExampleDataWriter::write |
| ExampleDataWriter::write_w_timestamp | |
| ExampleDataWriter::write_w_dst | |
| 数据实例管理 | ExampleDataWriter::register_instance |
| ExampleDataWriter::register_instance_w_timestamp | |
| ExampleDataWriter::unregister_instance | |
| ExampleDataWriter::unregister_instance_w_timestamp | |
| ExampleDataWriter::dispose | |
| ExampleDataWriter::dispose_w_timestamp | |
| ExampleDataWriter::get_key_value | |
| ExampleDataWriter::lookup_instance | |
| 实体状态查询 | DataWriter::get_liveliness_lost_status |
| DataWriter::get_offered_deadline_missed_status | |
| DataWriter::get_offered_incompatible_qos_status | |
| DataWriter::get_publication_matched_status | |
| 数据写者信息查询 | DataWriter::get_topic |
| DataWriter::get_publisher | |
| 匹配对端信息查询 | DataWriter::get_matched_subscriptions |
| DataWriter::get_matched_subscription_data | |
| 存活性管理 | DataWriter::assert_liveliness |
| 其他 | DataWriter::wait_for_acknowledgments |
| DataWriter::flush |
(向左滑动)
2.2.5. 订阅模块
2.2.5.1. 订阅者
| 功能 | 接口 |
|---|---|
| 实体功能 | Subscriber::enable |
| Subscriber::set_listener | |
| Subscriber::get_listener | |
| Subscriber::get_instance_handle | |
| Subscriber::get_status_changes | |
| Subscriber::get_statuscondition | |
| Subscriber::get_participant | |
| Subscriber::set_qos | |
| Subscriber::get_qos | |
| 作为数据读者的工厂 | Subscriber::create_datareader |
| Subscriber::delete_datareader | |
| Subscriber::lookup_datareader | |
| Subscriber::delete_contained_entities | |
| Subscriber::set_default_datareader_qos | |
| Subscriber::get_default_datareader_qos | |
| Subscriber::copy_from_topic_qos | |
| 数据获取方式 | Subscriber::begin_access |
| Subscriber::end_access | |
| Subscriber::get_datareaders | |
| Subscriber::notify_datareaders |
(向左滑动)
2.2.5.2. 数据读者
数据读者的类型无关功能描述参见下表,数据读者提供强类型安全的接口,该接口由DDS编译器根据IDL中定义的类型自动生成,其中类型无关的接口参见DataReader 、类型相关的接口参见 ExampleDataReader 接口说明。
| 功能 | 接口 |
|---|---|
| 实体功能 | DataReader::enable |
| DataReader::set_listener | |
| DataReader::get_listener | |
| DataReader::get_instance_handle | |
| DataReader::get_status_changes | |
| DataReader::get_statuscondition | |
| DataReader::set_qos | |
| DataReader::get_qos | |
| 实体状态查询 | DataReader::get_sample_lost_status |
| DataReader::get_sample_rejected_status | |
| DataReader::get_subscription_matched_status | |
| DataReader::get_liveliness_changed_status | |
| DataReader::get_requested_deadline_missed_status | |
| DataReader::get_requested_incompatible_qos_status | |
| 数据读者信息查询 | DataReader::get_topicdescription |
| DataReader::get_subscriber | |
| 匹配对端信息查询 | DataReader::get_matched_publications |
| DataReader::get_matched_publication_data | |
| 读取状态管理 | DataReader::create_readcondition |
| DataReader::create_querycondition | |
| DataReader::delete_readcondition | |
| DataReader::delete_contained_entities | |
| 其他 | DataReader::wait_for_historical_data |
(向左滑动)
2.2.5.3. 获取主题数据
当数据样本到达订阅端时,DDS底层会根据主题匹配信息分发给不同的数据读者去处理,当完成处理(资源限制等QoS配置)时,数据读者将把该数据样本存储在底层的队列中,并通知用户,再等待用户通过接口来取出该数据样本,DDS通知用户数据到达的方式有两种:异步监听方式以及同步等待方式,用户通过数据读者的读取数据接口访问底层队列中的数据样本,这些接口的摘要信息参见下表,详细信息参见相应的接口说明。用户可以通过多种方式访问底层存储的队列数据:
1. 提供样本深拷贝以及零拷贝(仅提供数据样本在底层队列中的指针或者引用)两种方式;
2. 指定最大获取数量;
3. 访问处于指定状态的样本,样本状态由 SampleStateKind 、 ViewStateKind 、 InstanceStateKind 三个状态定义;
4. 按照数据实例访问,包括指定数据实例以及按数据实例顺序;
5. 按照样本的顺序依次访问;
6. 读取/取出两种访问方法,其中读取操作不从底层队列中删除,而取出操作则从底层维护的样本中删除。
| 分类 | 接口 | 说明 |
|---|---|---|
| 读取系列 | ExampleDataReader::read | 方式1 & 方式2 & 方式3 |
| ExampleDataReader::read_next_sample | 方式5 | |
| ExampleDataReader::read_instance | 方式1 & 方式2 & 方式3 & 方式4 | |
| ExampleDataReader::read_next_instance | 方式1 & 方式2 & 方式3 & 方式4 | |
| ExampleDataReader::read_w_condition | 同 ExampleDataReader::read | |
| ExampleDataReader::read_next_instance_w_condition | 同 ExampleDataReader::read_next_instance | |
| 取出系列 | ExampleDataReader::take | 方式1 & 方式2 & 方式3 |
| ExampleDataReader::take_next_sample | 方式5 | |
| ExampleDataReader::take_instance | 方式1 & 方式2 & 方式3 & 方式4 | |
| ExampleDataReader::take_next_instance | 方式1 & 方式2 & 方式3 & 方式4 | |
| ExampleDataReader::take_w_condition | 同 ExampleDataReader::take | |
| ExampleDataReader::take_next_instance_w_condition | 同 ExampleDataReader::take_next_instance | |
| 归还空间 | ExampleDataReader::return_loan | 配合实现零拷贝 |
(向左滑动)
2.3. QoS定义
下一期再继续分享。
3. PSM-IDL
因为上面定义的是平台/技术无关的模型,在这一章OMG用IDL给出了DCPS的一种定义,所谓PIM就是只规定形式和行为,具体数据结构在PSM中给出,这是OMG DDS规范的一般套路,打个比方,在PIM中会定义 InstanceHandle_t 这个结构的含义是用来唯一标识实体或者数据实例,但是不会规定如何来实现,在PSM中会定义 InstanceHandle_t 就是8个字节或者16个字节。
4. 开发流程
5. 代码示例
5.1. 发布端
#include"DomainParticipantFactory.h"
#include"DomainParticipant.h"
#include"DefaultQos.h"
#include"Publisher.h"
#include"DataWriter.h"
#include"Topic.h"
#include"Foo.h"
#include"FooDataWriter.h"
#include"FooTypeSupport.h"
#include"ZRSleep.h"
#include
intmain()
{
//域
DomainId_tdomainId=11;
DomainParticipantFactory*factory=DomainParticipantFactory::get_instance();
//域参与者
DomainParticipant*participant=factory->create_participant(
domainId,
DOMAINPARTICIPANT_QOS_DEFAULT,
NULL,STATUS_MASK_NONE);
if(NULL==participant)
{
printf("createparticipantfailed.\n");
return-1;
}
//注册类型
constChar*type_name=FooTypeSupport::get_instance()->get_type_name();
if(type_name==NULL)
{
return-1;
}
ReturnCode_trtn=FooTypeSupport::get_instance()->register_type(participant,type_name);
if(rtn!=RETCODE_OK)
{
printf("registertypefailed.\n");
return-1;
}
//创建主题
Topic*topic=participant->create_topic("example",type_name,TOPIC_QOS_DEFAULT,NULL,STATUS_MASK_NONE);
if(topic==NULL)
{
printf("createtopicfailed.\n");
return-1;
}
//创建发布端
Publisher*publisher=participant->create_publisher(
PUBLISHER_QOS_DEFAULT,
NULL,STATUS_MASK_NONE);
if(publisher==NULL)
{
printf("createpublisherfailed.\n");
return-1;
}
//创建数据写者
DataWriterQoswriter_qos;
publisher->get_default_datawriter_qos(writer_qos);
writer_qos.history.depth=5;
DataWriter*writer=publisher->create_datawriter(
topic,writer_qos,NULL,STATUS_MASK_NONE);
FooDataWriter*_writer=dynamic_cast(writer);
if(writer==NULL)
{
printf("createdatawriterfailed.\n");
return-1;
}
//创建数据样本
Foosample;
while(true)
{
//在此处修改数据样本的值
//发布数据样本
_writer->write(sample,HANDLE_NIL_NATIVE);
ZRSleep(1000);
}
return0;
}
(向左滑动)
5.2. 订阅端
#include"DomainParticipantFactory.h"
#include"DomainParticipant.h"
#include"DefaultQos.h"
#include"Subscriber.h"
#include"DataReader.h"
#include"Topic.h"
#include"DataReaderListener.h"
#include"Foo.h"
#include"FooDataReader.h"
#include"FooTypeSupport.h"
#include"ZRSleep.h"
#include
//继承DataReaderListener
classMylistener:publicDataReaderListener
{
//回调函数
voidon_data_available(DataReader*the_reader)
{
printf("receiveddata.\n");
FooDataReader*foo_reader=dynamic_cast(the_reader);
if(foo_reader==NULL)
{
printf("castreaderfailed.\n");
return;
}
FooSeqdata_values;
SampleInfoSeqsample_infos;
ReturnCode_trtn;
rtn=foo_reader->take(data_values,
sample_infos,
MAX_INT32_VALUE,
ANY_SAMPLE_STATE,
ANY_VIEW_STATE,
ANY_INSTANCE_STATE);
if(RETCODE_ERROR==rtn)
{
printf("takefailed.\n");
return;
}
if(RETCODE_NO_DATA==rtn)
{
printf("nodata.\n");
return;
}
for(inti=0;i< sample_infos.length();i++)
{
if(sample_infos[i].valid_data)
{
FooPrintData(&data_values[i]);
}
}
foo_reader->return_loan(data_values,sample_infos);
}
};
intmain()
{
//域
DomainId_tdomainId=11;
DomainParticipantFactory*factory=DomainParticipantFactory::get_instance();
//域参与者
DomainParticipant*participant=factory->create_participant(
domainId,
DOMAINPARTICIPANT_QOS_DEFAULT,
NULL,STATUS_MASK_NONE);
if(NULL==participant)
{
printf("createparticipantfailed.\n");
return-1;
}
//注册类型
constChar*type_name=FooTypeSupport::get_instance()->get_type_name();
if(NULL==type_name)
{
return-1;
}
ReturnCode_trtn=FooTypeSupport::get_instance()->register_type(participant,type_name);
if(RETCODE_OK!=rtn)
{
printf("registertypefailed.\n");
return-1;
}
//创建主题
Topic*topic=participant->create_topic("example",type_name,TOPIC_QOS_DEFAULT,NULL,STATUS_MASK_NONE);
if(NULL==topic)
{
printf("createtopicfailed.\n");
return-1;
}
//创建订阅端
Subscriber*subscriber=participant->create_subscriber(
SUBSCRIBER_QOS_DEFAULT,
NULL,STATUS_MASK_NONE);
if(NULL==subscriber)
{
printf("createsubscriberfailed.\n");
return-1;
}
//监听器
Mylistener*listener=newMylistener;
//创建数据读者
DataReaderQosreader_qos;
subscriber->get_default_datareader_qos(reader_qos);
reader_qos.history.depth=5;
DataReader*reader=subscriber->create_datareader(
topic,reader_qos,listener,STATUS_MASK_ALL);
FooDataReader*_reader=dynamic_cast(reader);
if(NULL==reader)
{
printf("createdatareaderfailed.\n");
return-1;
}
while(true)
{
ZRSleep(1000);
}
return0;
}
(向左滑动)
-
通信
+关注
关注
18文章
6024浏览量
135950 -
中间件
+关注
关注
0文章
65浏览量
18168 -
DDS
+关注
关注
21文章
633浏览量
152630
发布评论请先 登录
相关推荐
一种嵌入式系统通信中间件的设计
中间件在产业链协同平台的应用和研究
基于中间件技术的异构机器人系统设计及实现
基于JMS的RFID中间件设计与实现

NGB中间件标准考虑因素
常见的中间件有哪些?汇总解析
物联网软件系统中的RFID中间件介绍

汽车软件通信中间件iceoryx和它的零拷贝技术

自动驾驶通信中间件






 工商网监
工商网监
评论