 满足了磁场测量精度要求的16位A/D转换器AD676
满足了磁场测量精度要求的16位A/D转换器AD676
1 AD676的结构特点
在对舰船磁场的测量过程中,由于舰船的运动姿态不断变化,使舰船磁场投影到各分量的强度也不断变化。为实现对舰船磁场的动态测量,因此,磁场测量必须快速而准确。选用87C51单片机扩展内置微控制器的高速16位A/D转换器AD676能很好地满足这一要求。

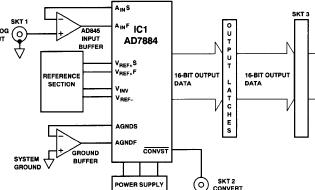
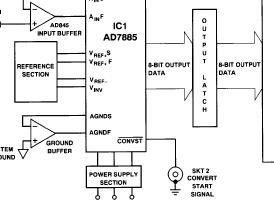
AD676的内部结构如图1所示。由两个单片部分组成,即数字控制单片和vwin ADC单片。数字控制单片是用DXPCMOS工艺制造,而模拟ADC单片是用BIMOSⅡ工艺制造的。该器件是使用逐次逼近技术来实现A/D转换的,但内部没有传统的电阻梯网络,取而代之的是电容阵列。AD676是采用带二进制权值的电容器将输入的采样信号进行分配以实现模拟到数字的转换的。采用电容阵列带来了三方面的好处:
(1).达到了100KSPS的高速转换率(总的转换时间为10μS);
(2).消除了传统的电阻网络因电阻值随温度变化所引起的误差;
(3).在不需增加外部电路的情况下,电容阵列实现了采样保持功能。
但是,电容阵列具有初始误差,内部微程序控制器是专为消除电容阵列的初始误差而
设计的。微程序控制器通过DAC来检测电容阵列的匹配误差,并把所检测到的误差存放在内部数据存储器RAM中,在初始采集数据之前,要使AD676进行一次自动校准,在以后的转换中,微程序控制器便使用RAM中的值来校准转换所得的数字量而改善转换精度。因此,AD676不需用户校准或调整,能自动保持器件的高性能。
AD676内部的所有功能,包括实际的逐次逼近算法、自动校准、采样保持操作、内部数据的输出锁存都是在微程序控制下进行的。应用中,不需用户增加额外的硬件和软件开销,给用户带来了很大的方便。
2 AD676的主要性能
(1).16位无丢失码
(2).转换速率100KSPS(总的转换时间为10μS)
(3).自动非线性校准
(4).积分非线性误差(1NL)士1LSB
(5).总的谐波失真(THD)0.002%
(6).片内具有采样—保持功能
(7).满功率带宽1MHz.
(8).输入模拟信号范围士Vref
(9).供电范围:Vdd = +5V士10%
Vcc = +12V士5%
Vee = -12V士5%
AD676采用28引脚DIP封装和28引脚边铜焊陶瓷封装,封装引脚见图2。
3 AD676的时序
(1).校准时序
AD676通过片内自动校准过程不需用户校对和调整便能达到规定的性能。校准过程只需在初始采集数据前进行一次即可,校准时序见图3。

当给CAL加高电平时,AD676内部复位,BUSY输出高电平,表明AD676已作好校准的准备。当给CAL加低电平时,校准过程开始,校准时间为85530个时钟周期,完成校准的标志为BUSY变为低电平。在大多数应用场合下,仅在上电时有充分的时间对AD676进行校准,所以要特别注意,应等到电源和电压基准稳定以后才能开始进行校准。
(2).一般的转换时序
转换由输入信号采集过程和16位内部逐次逼近过程组成。
输入信号采集过程:将SAMPLE线保持高电平状态,保持时间ts≥2μS,再将SAMPLE线变为低电平,SAMPLE下降沿所对应的输入电压值Vin即为实际采样值。SAMPLE为低电平后,输入Vin与内部电容阵列断开,输入信号采样过程结束。值得注意的是采样期间AD676忽略掉输入的时钟脉冲,应用中为防止输入时钟脉冲对输入信号干扰,采样期间最好切断时钟脉冲的输入。
16位逐次逼近转换过程:在SAMPLE线变为低电平tsc时间后(tsc≥50nS)的17个时钟脉冲内,AD676完成16位逐次逼近转换过程,转换期间BUSY变为高电平,转换结束BUSY变为低电平。当BUSY变为低电平后,数据被输出到BITl―BITl6引脚上,并一直保持到下一次转换开始。因此,在BUSY变为低电平后到下一次转换开始前的任何时刻都可以读出本次转换的结果数据。
4AD676在测磁设备中的应用
已成功地将AD676应用于舰船磁场高速数据采集系统中,这里介绍该系统中AD676与87C51单片微机的接口电路,接口电路如图5所示。图中将信号处理部分电路、电源处理部分电路及外围电路等省去,旨在着重说明AD676的使用方法。

87C51单片微机内带4K字节的程序存储器EPROM。当不需进行外部程序存储器扩展和数据存储器扩展时,87C51的4个8位并行口P0、P1、P2、P3全归用户使用。因此用87C51与AD676接口,可设计出体积小、耗电省的舰船磁场高速高精度数据采集设备。也适用于对体积、功耗、速度和精度要求都很苛刻的场合。如油井探测、地震数据采集、贵重物重量测量及其它高精度测量仪器。
AD676的输出不具备三态功能,但其输出逻辑与CMOS和TTL兼容。因此可直接把AD676的BIT1―BIT16与87C51的P0口和P2口相接。若将AD676与8031接口,则应扩展两个8位的输入口,再将AD676的BIT1―BIT16经输入接口引到8031的数据总线(P0口)上。校准控制CAL和转换控制SAMPLE可接到P1或P3口的任一位上。例如由P3.0控制校准CAL,由P3.1控制转换SAMPLE,转换结束信号BUSY接外部中断INT0。BUSY还控制时钟脉冲信号的输入,如5图所示,当BUSY为低电平时,计数器74LS90将停止工作。图中AD587提供10V的电压基准。若采用5V的电压基准,只要用AD586替代AD587即可。
由以上分析,不难编写出AD676校准程序和数据采集转换程序。校准程序段如下:
CLR P3.1;将SAMPLE保持低电平
SETB P3.0;作校准准备
CLR P3.0;开始校准
JB P3.2,$ ;等待校准
数据采集转换过程可采用查询方式或中断方式编写,采用查询方式编写的程序段如下:
SETB P3.1;接通Vin给电容阵列充电
NOP
NOP;等待2μs
CLR P3.1;启动转换
JB P3.2,$;等待转换
MOV @R0,P2;存放高8位数据
INC R0
MOV @R0,P0;存放低8位数据
…
5 结束语
本文设计的AD676应用方法能充分发挥其内部的各项功能。如利用内部电容阵列在不外接采样保持器的情况下便能对舰船磁场进行动态测量、利用内置的微控制器在测量前进行校验便能获得很好的线性度。利用其所具有的高分辨率能获得很高的测量精度。AD676的应用简化了电路设计,降低了制作成本,并有效地提高了舰船磁场测量系统的性能。
-
磁场
+关注
关注
3文章
877浏览量
24210 -
单片机
+关注
关注
6035文章
44554浏览量
634635 -
转换器
+关注
关注
27文章
8694浏览量
147085
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论