 高端MEMS固体波动陀螺的发展历程、研究现状、应用以及未来发展方向
高端MEMS固体波动陀螺的发展历程、研究现状、应用以及未来发展方向
引言
1890年,物理学家Bryan G H发现挠性半球可测量转动的Bryan G H理论。1988年美国加州大学伯克利分校Muller研究小组发明了转子直径为60~100 μm的硅静电电机。至此,MEMS陀螺就以其体积小、质量轻、功耗低、适于批量化生产,而受到各发达国家的重视,纷纷展开研究和应用。旋转振动结构、旋转盘结构、振动盘结构、线振动结构、正交线振动结构(振动平板结构、振动梁结构、振动音叉结构和加速度计振动结构)和非正交线振动结构(薄壁半球共振、共振圆柱结构和共振环结构)MEMS陀螺相继出现。据国外研究者分析,按MEMS陀螺不同的工作原理、技术方案、加工工艺的可能组合选择方案达2000种以上。同时,系统技术的进步和工艺水平的提高,也给MEMS惯性技术的发展带来了新的机遇,MEMS惯性仪表的性能在很短的几十年内得到了迅速的提高,并不同程度得到广泛应用。其中,消费用MEMS陀螺大多采用传统的音叉结构,无法满足高精度,特殊环境下的应用需求。
在国外,军用高端MEMS陀螺技术路线和商用MEMS陀螺技术路线完全不同,军用高端MEMS陀螺技术路线,基本都是采用环境适应性好的全对称结构。美国国防预先研究计划局(DARPA)的微型PNT(Micro-PNT)项目重点支持多环谐振盘陀螺(DRG)和微半球陀螺(VRG)的研制,取得很好结果。2015年,DARPA新启动的高级惯性微传感器(AIMS)项目,强调只支持结构上全对称的二维或三维的CVG-II型陀螺研制。英国BAE系统公司在20世纪90年代开始谐振环陀螺研制,产品已批量用于APKWS制导炸弹、NLAW反装甲武器以及155 mm雷神制导炮弹和卫星等。它相对于目前调谐音叉式、平板振动式、壳体振动式等MEMS陀螺技术具有高精度、高动态范围、抗过载能力强,能直接测量转动角度,避免了后续积分电路或算法带来的动态误差以及角度和角速率模式之间的切换、便于批量生产等独特优势,成为未来多种中高精度武器载体平台,尤其是高动态旋转制导炮弹及火箭弹用惯性导航系统的有效技术。
发达国家始终未停止对高性能环形全对称结构MEMS惯性器件的研制步伐,已在实战中经过检验,实现了以全对称环形固体波动陀螺的“中高精度、低成本、高可靠、大批量、中端军用”应用设想。而且,新一代高精度硅微半球和全对称环形固体波动陀螺及其多陀螺阵列集成技术正在兴起。
01
固体波动陀螺到MEMS陀螺的发展历程
1固体波动理论与哥氏力陀螺
1960年,固体波动陀螺经历了金属半球谐振陀螺(HRG)、石英HRG的研制与升级,又演化为基于MEMS工艺的三维、二维谐振陀螺。最终确立了高端MEMS谐振陀螺的发展方向与技术路线。
固体波动陀螺的基本原理是:旋转轴对称物体(谐振子)中被激励的驻波转动角与输入角速率在其对称轴上的投影成一定比例。该原理利用了旋转轴对称物体中弹性波惯性效应,即驻波进动特性。
如图1所示,质量块P固连在旋转坐标系的xoy平面,若沿x轴方向以相对旋转坐标系的速度v运动,旋转坐标系绕z轴以角速度ω旋转。在质量块P上哥氏效应产生的哥氏力为:Fcor=2m(v×ω)。其中,m为质量块P的质量。

图1 振动式陀螺工作原理
可见,哥氏力Fcor与质量块P上的输入角速度ω成正比,并引起质量块在y轴方向产生的位移(输入角速度的信息)。概而言之,振动陀螺的振动部件受驱动而在第一振动模态(又称驱动模态,如图1质量块P沿x轴运动),当与第一振动模态垂直的方向有旋转角速度输入时(如图1沿z轴的旋转角速度),振动部件因哥氏效应产生了一个垂直第一振动模态的第二振动模态(又称敏感模态,如图1质量块P沿y轴产生的位移),该模态直接与旋转角速度成正比。各类不同结构形式的振动陀螺实际上都是运用了同样原理。
谐振环式陀螺由振环、支撑梁及驱动、检测控制电极组成,基于对称性的考虑需要至少8个弹簧梁使结构平衡并有2个相同自然频率的弯曲模态,如图2所示。在静电力(或电磁力)驱动下谐振环在一个平面内以固定幅值、椭圆形进行一阶弯曲模态振动,当它围绕法线轴旋转时,哥氏力将使得振动能量转移到相位差45°的二阶检测振动模态,二阶检测振动模态的振动幅值与输入角速率成比例,并可以用电容的变化来检测。
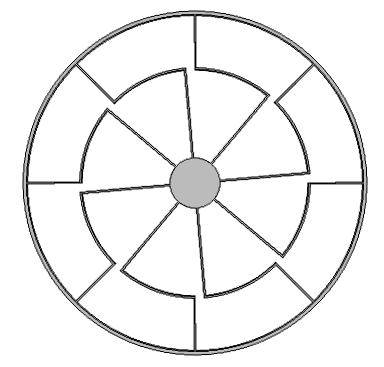
图2 谐振环结构陀螺
2从HRG到MEMS平面陀螺的演化
HRG是固体波动陀螺的具体实现。1965年,David L博士完成全对称HRG的理论建模分析。1975年,美国Delco公司研制出世界上第一个半球谐振陀螺,精度达50 (°)/h;后来采用高Q值石英材料,1980年精度达到1 (°)/h。1996年,利顿公司收购Delco公司为美国哈勃望远镜计划研制高性能石英HRG,指标为:量程为0.5 (°)/s,零偏稳定性为0.00008 (°)/h,角度随机游走 0.00001(°)/h1/2。
2000年、2009年、2011年,Kristiansen和Shatalov以及任顺清等学者分别建立了圆柱形谐振陀螺和半球谐振陀螺的等效方程,从而利用簿壳力学中的能量原理给出了两种结构振动陀螺的动力学方程,为圆柱形谐振陀螺和半球谐振陀螺的研究发展做出巨大贡献。
2000年,利顿公司被诺格公司收购,该公司研制500多个HRG陀螺分别用于美国金星探测和彗星撞击等重大宇航任务。研究表明半球谐振陀螺在性能上几乎没有物理限制,发展潜力很大。但半球谐振陀螺是三维结构,加工工艺复杂,制造难度大,无法实现低成本批量化生产。在发展过程中有多种结构变化,衍生出多种二维结构,如图3所示。这些二维结构非常适合目前的MEMS制造工艺,可实现低成本批量化生产。
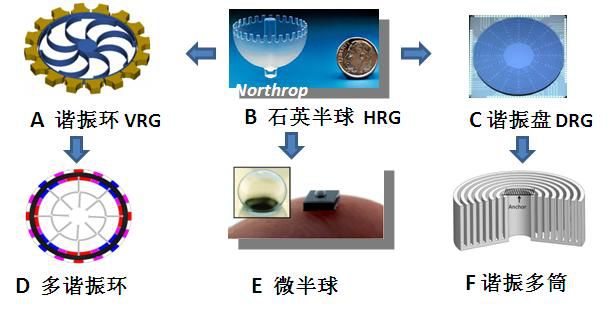
图3 半球谐振陀螺的发展与衍变
图3(A)的谐振环陀螺是半球陀螺的一种简化形式。英国古德里奇公司、BAE公司(大西洋惯性系统分公司)从早期的金属筒型结构VSG-1起,始终致力于环形陀螺的研究,自20世纪90年代开始谐振环陀螺的研制,逐渐演进至新的压电材料环形陀螺VSG-5。其历代货架产品CRS03、CRG20、CRM100/200等系列产品占据世界中高端MEMS陀螺市场很大份额,并应用于英、美、瑞典、土耳其等国的制导弹药武器。目前已研制到第四代,最新产品陀螺零偏稳定性已达到0.1 (°)/h1/2。
美国多所大学也开展了新型全对称结构陀螺的研究。其中,密歇根大学Ayazi博士2000年完成世界第一款MEMS全对称环形陀螺,陀螺零偏稳定性达到5 (°)/h。2008年,Zaman博士进行谐振星型结构改进,陀螺零偏稳定性已达到2.5 (°)/h。图3(c)为伯克利大学等几个学校联合研制的谐振盘陀螺,直径0.6 mm、厚度20 μm,样品精度达到3.27 (°)/h。图3(F)是密歇根大学研发的多筒谐振速率积分陀螺,谐振频率为3 kHz,Q值72000,零偏为129 (°)/h,角度随机游走系数达到0.09 (°)/h1/2。
02
国外军用MEMS谐振陀螺研制现状
1从HRG到MEMS平面陀螺的演化
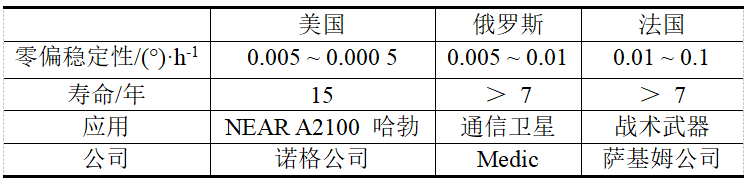
1996年,美国首次在空间应用HRG姿态敏感单元,约125套累计飞行2×107h。俄罗斯、法国等国发展迅速,均取得了良好应用效果。HRG被国际惯性界认为是21世纪广泛用于各类运载器捷联系统中最理想的器件,国外HRG对比如表1所示。
表1 国外HRG研制水平对比
2MEMS谐振陀螺研制现状
MEMS谐振环陀螺源于石英HRG,是HRG的简化结构形式。与HRG相比,除了保持HRG敏感结构全对称、高精度、环境适应性好,适合应用在性能要求高并且环境恶劣的航天及军事等领域外,还具有结构简单、可靠、体积小、便于批量化集成制造。目前,谐振环陀螺已经发展到第四代产品,如图4所示,逐渐从机械陀螺转变为MEMS硅基陀螺。
第一代谐振环陀螺
第一代谐振环陀螺产品采用圆柱壳体的陶瓷结构,类似于传统陀螺,研制平台主要为机械加工平台。其特点是敏感结构采用机械加工手段制备、体积大、敏感信号强、采用传统组织工艺技术。
第二代谐振环陀螺
第二代谐振环陀螺产品通过驱动和检测技术的进步简化了结构,但和第一代产品类似,研制平台主要为机械加工平台。
第三代谐振环陀螺
第三代谐振环陀螺产品采用了新的MEMS加工技术,通过电磁激励和电流检测,使陀螺的体积变小,性能得到大幅度提升。其特点是:a)敏感结构采用MEMS技术加工,并且使用激光修调技术对两个谐振模态间的频差进行调节(频差<1 Hz),通过两模态间的匹配增强能量转换能力,提高器件性能;b)采用微电子封装技术(金属管壳)和传统组装技术(磁芯装配)的结合进行产品封装。其研制平台是机械加工平台、微电子平台和MEMS平台的结合。
第四代谐振环陀螺
第四代谐振环陀螺产品采用了全新的MEMS加工技术,去除了陀螺内部的磁芯结构,通过电容激励、电容检测、修调等技术,使陀螺的性能、体积、功耗等得到大幅度提升。其器件特点是:
a)敏感结构采用MEMS技术加工;
b)使用修调技术对两个谐振模态间的频差(<0.1 Hz)进行调节,通过两模态间的匹配增强能量转换能力,提高器件性能;
c)采用专用处理电路和微处理器结合进行信号检测和处理;
d)采用MCM封装形式进行陀螺仪封装。
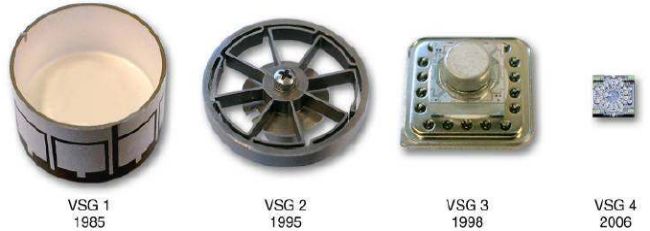
图4 硅微机械陀螺仪发展历程
第四代谐振环陀螺研制平台是微电子平台和MEMS平台的结合,产品的技术特点也是目前世界上主流MEMS陀螺产品的发展趋势,主要特点包括:
a)敏感结构采用高真空封装,Q值很高;
b)对敏感结构进行调节,提高敏感结构的固有特性和成品率;
c)采用专用处理电路,提升信号处理和敏感结构调节能力;
d)采用微处理器,提升产品的内部补偿和环境适应性;
e)采用MCM一体化封装技术,减小体积,提高稳定性;
f)采用系统级设计,进行敏感结构、处理电路、微处理器、以及封装等陀螺仪各部分之间的匹配,充分发挥系统各部分的技术优势,弥补相互间的技术瓶颈,实现系统性能的最大化。
具有上述特点的硅基MEMS陀螺仪已经逐步由新兴走向成熟,进而走向系统集成化道路,实现MEMS惯性测量单元(IMU)等系统的应用。
英国BAE系统公司采用MEMS谐振环陀螺实现了MEMS IMU系列化,最小体积仅有16 cm3,是目前世界上最小的IMU单元,可以把此IMU植入到士兵的战靴中,实现单兵全时导航。BAE公司MEMS IMU系列化如图5所示,此类型陀螺具有超高抗高冲击能力,并且采用数字闭环电路控制,通过改变标度因数控制环路的参数,其量程在600~12 000 (º)/s的范围内可调整,零偏稳定性<0.1 (°)/h。BAE生产的谐振环陀螺有角速率和速率积分两种模式,研制的产品用于高速旋转弹、中程导弹和美国155 mm制导神箭炮弹等武器系统。ESA研究的空间用MEMS谐振环陀螺已在2012年Cryosat2卫星完成在轨验证,并将用于2018年发射的火星车(ExoMars rover)。
日本硅传感系统公司(SSS)一直从事MEMS谐振环陀螺研制,最新产品零偏稳定性优于0.06 (°)/h,角度随机游走优于0.01 (°)/h1/2,是谐振环陀螺的最高水平。
图5 BAE系统公司系列化MEMS IMU
3MEMS碟形陀螺研制现状
MEMS碟形陀螺是目前MEMS陀螺中报导精度最高的陀螺器件,也是目前最热门的平面工艺MEMS陀螺结构之一。
早在1994年波音公司研制的半球谐振陀螺就应用于波音公司的TDRS HIJ卫星上,并于2000年用于第二代TDRS卫星,同时开展MEMS陀螺研制,研制路线如图6所示。
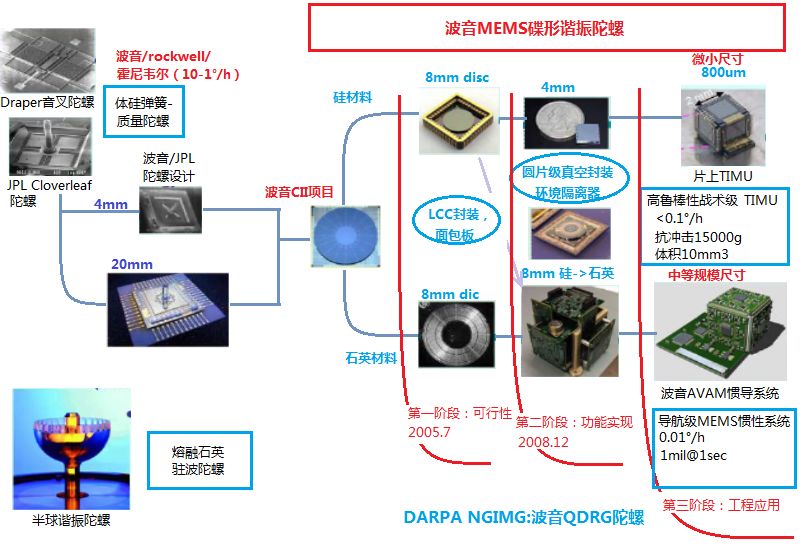
图6 波音公司高性能MEMS陀螺研制路线图
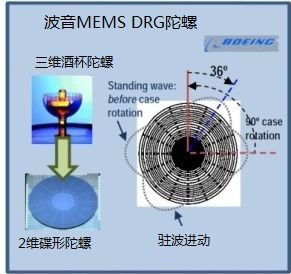
图7 MEMS 碟形陀螺
基于HRG和其它MEMS陀螺的研制基础,喷气推进实验室和波音公司把HRG和音叉式MEMS陀螺结合,提出了多环结构的MEMS碟形陀螺方案,即多环谐振盘陀螺。多环谐振盘陀螺包括一系列的同心圆盘,各同心环通过微梁与中心圆盘相连接,如图7所示。这种多同心环结构减少了半径刚度,它的多同心环设计实现结构的全对称性,全对称结构的敏感结构可以减少驱动和检测模态的正交耦合,从而实现硅微陀螺驱动模态与检测模态间的匹配。多环的设计不仅大大增加了电极区域,提高了检测和驱动的电容,从而提高了陀螺的检测灵敏度,也增加了有效质量,而增加有效质量对降低噪声水平非常关键,采用多环和多检测电极解决了环陀螺信噪比低的难点。在美国DARPA导航级集成微陀螺仪(NGIMG)项目支持下,谐振盘陀螺的研究取得了突破性进展,基于8 mm直径硅材料的谐振盘陀螺实现了零偏稳定性优于0.01 (°)/h,角度随机游走优于0.002(°)/h1/2。为进一步缩小和HRG的性能差距,基于8 mm直径石英玻璃材料或更大直径的谐振盘陀螺正在研制中。预期目标是谐振盘陀螺的Q值提高一到两个数量级,角度随机游走提升一个数量级。
2013年,MEMS谐振盘陀螺研制团队从波音公司和喷气推进实验室剥离,成立SIM(Sensor in Motion)公司,专业从事谐振盘陀螺的研发与生产。依靠30多年积累的技术和经验,生产高性能低成本导航级谐振盘陀螺,产品代表MEMS陀螺最高水平,达到激光和光纤陀螺性能。基于谐振盘陀螺的指北仪体积180 cm3,质量0.11 kg。
在军用、航天航空等领域,MEMS陀螺中,谐振环陀螺和多环碟形谐振盘陀螺产品化水平最高,并在武器装备中得到广泛应用。
03
未来高端MEMS陀螺发展方向
1美国高端MEMS陀螺研制计划
美国等西方发达国家非常重视MEMS惯性系统与器件的研制,DARPA针对MEMS惯性器件的研制制定了很多具体的计划,具有重要的参考价值。其中DARPA MTO在器件级有两项陀螺研究项目,一个为NGIMG,一个是微速率积分陀螺仪(MRIG)项目。
NGIMG项目主要研发低功耗微型角速率传感器,在没有GPS信号时为单兵、车辆、无人机和大型作战平台提供支撑。研究目标为:零偏稳定性0.01 (°)/h,角度随机游走0.001 (°)/h1/2,波音公司多环谐振盘陀螺,图3(C)为重点研制方案。
2011年,DARPA启动的MRIG项目专门研制微半球陀螺,如图3(E)所示,目的是为高动态的空间武器提供支撑。研究目标为:量程15000 (°)/s,零偏稳定性0.01 (°)/h,刻度因子重复性0.01ppm。该项目鼓励结构创新,美国有八所大学参加研制,设计了多种创新的结构和3D制作工艺方案。
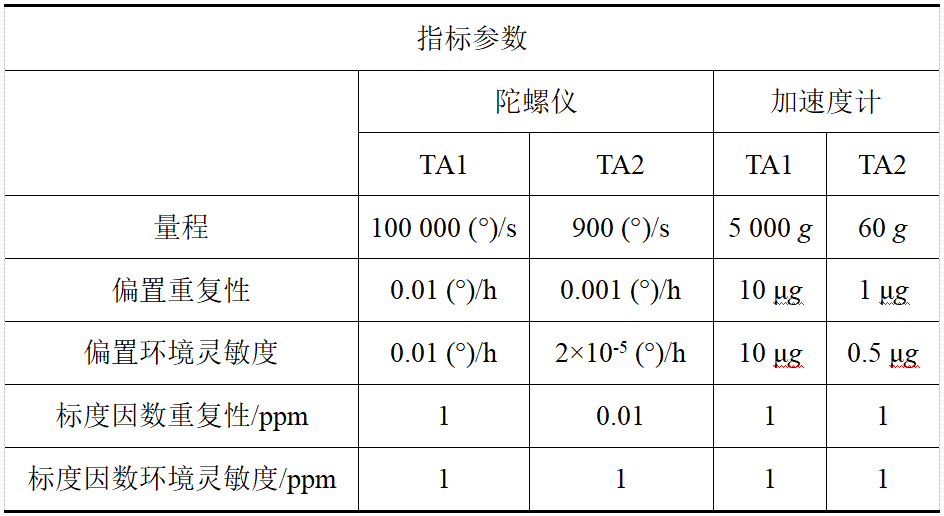
2015年,针对高级惯性器件DARPA新启动精确鲁棒惯性制导弹药(PRIGM)项目,研制高级新型低SWaP+C先进惯性微传感器(AIMS),满足在高冲击和高振动环境,具有高动态范围、低噪音、高精度的惯性器件,详细指标如表2和表3所示。其中,TA1为高动态环境器件指标,TA2为高精度和高稳定性器件指标。
表2 DARPA高级惯性微传感器AIMS研制指标(a)
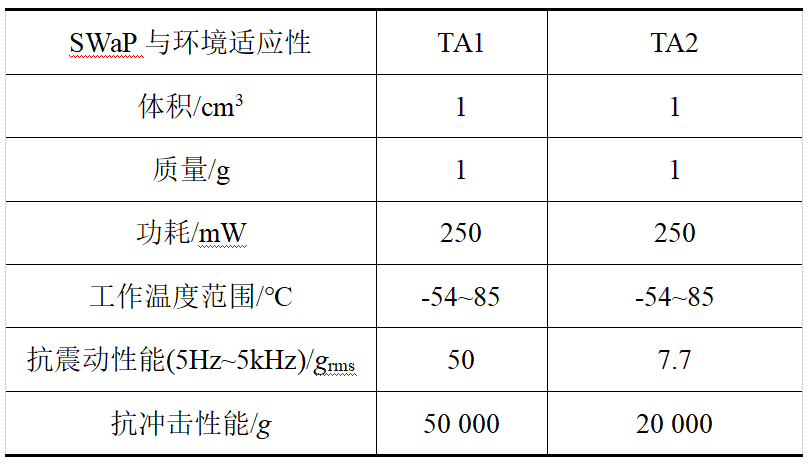
表3 DARPA高级惯性微传感器AIMS研制指标(b)
如图8~10所示,AIMS项目重点支持的三个陀螺研制方向为:1)速率积分陀螺;2)光检测MEMS陀螺;3)片上光波导陀螺。同时,DARPA强调只支持结构上高度对称的二维或三维的MEMS陀螺研制,不支持音叉型MEMS陀螺。
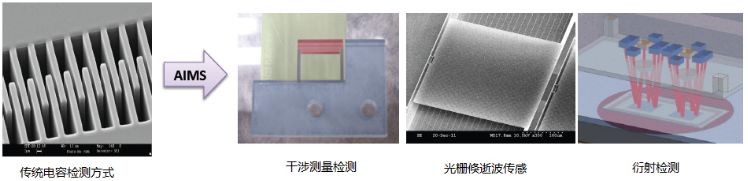
图8 AIMS计划发展的光学MEMS陀螺
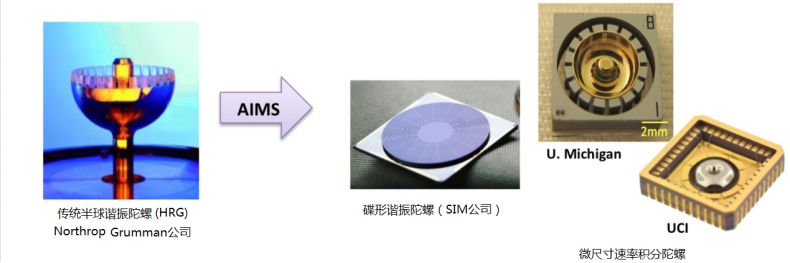
图9 AIMS计划发展的速率积分陀螺
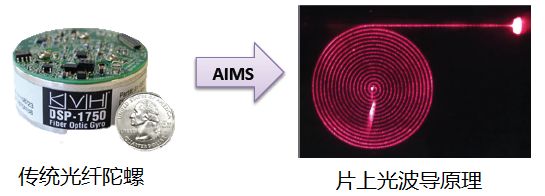
图10 AIMS计划发展的片上光波导陀螺
2未来高端MEMS陀螺关键技术
MEMS陀螺将不断突破、引入许多关键技术,逐步提高精度,在未来的高端应用领域能得到越来越广泛的应用。
静电平衡调整技术
MEMS工艺误差总是不可避免的,高精度MEMS陀螺对工艺误差非常敏感。工艺误差会使器件刚度与阻尼不对称,驱动模态与敏感模态存在频差,陀螺灵敏度降低,精度大打折扣。工艺误差存在随机性,因此要得到高精度MEMS陀螺往往是“百里挑一”。对工艺误差进行校正、调整,使高精度MEMS陀螺做到由“百里挑一”变为“百个如一”,是目前保障高精度陀螺成品率的重要技术途径。静电平衡调整技术是高效率、低成本的工艺误差调整技术手段。静电平衡调整可通过静电负刚度效应,调整刚度对称性,使驱动模态和敏感模态频率趋于一致,以提高精度。静电平衡调整技术涉及静电平衡基础理论、静电平衡电极排布、调整电压判据及测试、静电电压施加方法、静电调节自动化等,是未来高端MEMS陀螺的重要关键技术。
速率积分控制技术
速率积分陀螺,也称全角模式陀螺。速率积分陀螺相对于速率陀螺具有很多优势:速率积分陀螺动态范围更大、没有带宽限制、噪声误差不随时间累积等。因此速率积分陀螺是未来高精度陀螺的重要发展方向之一。速率积分控制技术是实现速率积分陀螺的关键技术。
原子级时钟锁频技术
原子级锁频MEMS陀螺,是基于原子级锁频技术以提高精度的MEMS陀螺。应用于MEMS陀螺的原子级锁频技术,旨在使MEMS陀螺谐振频率与一个极精准的频率基准(原子钟级别的精度)同步,利用“原子钟级别”的频率精确性,将MEMS陀螺谐振频率锁定在恒定值,不受环境影响而变化。原子级锁频技术可使MEMS谐振陀螺的角度随机游走与零偏稳定性提高几个数量级,从而使陀螺精度具有跨越式提升。原子级锁频技术是大幅提高MEMS陀螺精度极具潜力的技术。
系统自校准技术
自校准技术是指传感器上电后对零位输出进行自动校准、归零的技术。通过自校准技术,抵消陀螺零偏输出,消除陀螺多次上电零偏不一致的问题,对提高零偏重复性,尤其是提高长时间角度检测的精度有重要的作用。自校准技术是保障MEMS惯性传感器精度的又一技术瓶颈。
光检测技术
光学检测方法具有结构简单、精度高、稳定性好、抗电磁干扰等优点,将光学检测与MEMS传感器相结合,使测量精度更高、测量更加智能化,具有广阔的市场前景。
高Q值技术
高Q值是提高陀螺灵敏度的重要途径,是未来高精度MEMS陀螺的关键技术之一。
04
总结与启示
综上所述,HRG是一种典型的固体波动陀螺,具有很高的精度,并已得到广泛应用。但HRG加工难度大,批生产能力差,因此逐步衍生除了适合平面加工工艺的MEMS谐振环陀螺和谐振盘陀螺。具有全对称特性的MEMS平面陀螺具有良好的环境适应性,美国和欧洲多家军工企业MEMS陀螺均采用全对称特性的MEMS平面陀螺设计与加工技术,并在导弹、炮弹、卫星及空间飞行器上得到广泛应用,是未来高端MEMS陀螺研制的方向。
-
MEMS陀螺
+关注
关注
0文章
5浏览量
2301
原文标题:高端MEMS固体波动陀螺的发展与应用
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论