 Ubuntu系统迁移指南:轻松驾驭国产3568嵌入式实验箱
Ubuntu系统迁移指南:轻松驾驭国产3568嵌入式实验箱

本文基于创龙教仪 TL3568-PlusTEB 嵌入式教学实验箱实现 ubuntu 系统移植。
瑞芯微平台提供的SDK支持buildroot、Debian、yocto,但Ubuntu需要自行定制文件系统。
本文详细介绍了如何在Ubuntu虚拟机中使用ubuntu-base构建根文件系统,包括设置软件源、配置DNS、安装必要软件和桌面环境,以及修改系统配置。以及如何打包镜像文件,并将其烧录到瑞芯微RK3568开发板上,涉及挂载、格式化、修复和调整镜像大小的步骤。
Ubuntu 系统简介
Ubuntu是一个以桌面应用为主的Linux发行版操作系统,其名称来自非洲南部祖鲁语或豪萨语的“ubuntu"一词,意思是“人性”“我的存在是因为大家的存在",是非洲传统的一种价值观。
Ubuntu基于Debian发行版和GNOME桌面环境,而从11.04版起,Ubuntu发行版放弃了GNOME桌面环境,改为Unity。
此前人们认为Linux难以安装、难以使用,在Ubuntu出现后这些都成为了历史。Ubuntu也拥有庞大的社区力量,用户可以方便地从社区获得帮助。自Ubuntu 18.04 LTS起,Ubuntu发行版重新开始使用GNOME3桌面环境。

ubuntu-base 构建根文件系统
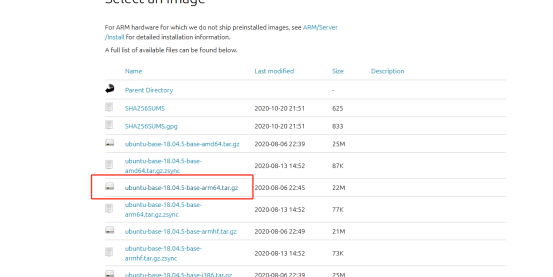
1.获取 ubuntu
在ubuntu官网获取 ubuntu-base-18.04.5-base-arm64.tar.gz,创龙教仪提供对应的文件:
2.解压、拷贝文件
执行以下命令将文件拷贝到ubuntu虚拟机,新建目录,解压:
mkdir ubuntu_rootfs
sudo tar -xpf ubuntu-base-18.04.5-base-arm64.tar.gz -C ubuntu_rootfs/
3.安装qemu-user-static
qemu-user-static是一个仿真器,可以选取arm64配置文件仿真开发板运行环境,然后挂载下载的ubuntu-base文件,从而构建ubuntu文件系统:
sudo apt install qemu-user-static
由于下载的ubuntu-base是aarch64架构的,因此需要拷贝 qemu-aarch64-static到ubuntu_rootfs/usr/bin/下:
sudo cp /usr/bin/qemu-aarch64-static ubuntu_rootfs/usr/bin
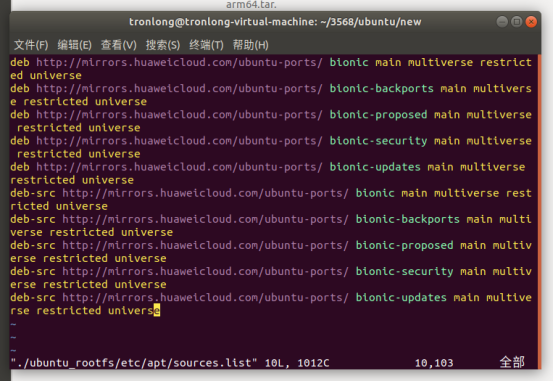
4.设置软件源
需要注意的是,这里要用 ARM 源,不能复制我们本机的源:
sudo vim ./ubuntu_rootfs/etc/apt/sources.list
这里我们选择华为国内下载源,如下图所示:
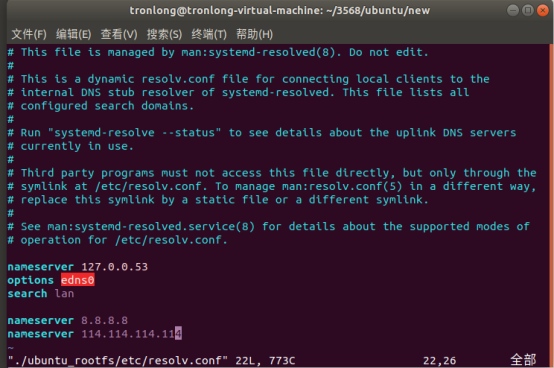
5.配置DNS
为了可以联网更新软件,我们拷贝本机的dns配置文件到根文件系统:
sudo cp /etc/resolv.conf ubuntu_rootfs/etc/resolv.conf
然后在/etc/resolv.conf文件中添加dns
sudo vim ./ubuntu_rootfs/etc/resolv.conf
添加内容如下:
如下图所示:
nameserver 8.8.8.8
nameserver 114.114.114.114
6.挂载ubuntu-base文件系统
编写挂载脚本:
#!/bin/bash
mnt() {
echo "MOUNTING"
sudo mount -t proc /proc ${2}proc
sudo mount -t sysfs /sys ${2}sys
sudo mount -o bind /dev ${2}dev
sudo mount -o bind /dev/pts ${2}dev/pts
sudo chroot ${2}
}
umnt() {
echo "UNMOUNTING"
sudo umount ${2}proc
sudo umount ${2}sys
sudo umount ${2}dev/pts
sudo umount ${2}dev
}
if [ "$1" == "-m" ] && [ -n "$2" ] ;
then
mnt $1 $2
elif [ "$1" == "-u" ] && [ -n "$2" ];
then
umnt $1 $2
else
echo ""
echo "Either 1'st, 2'nd or both parameters were missing"
echo ""
echo "1'st parameter can be one of these: -m(mount) OR -u(umount)"
echo "2'nd parameter is the full path of rootfs directory(with trailing '/')"
echo ""
echo "For example: ch-mount -m /media/sdcard/"
echo ""
echo 1st parameter : ${1}
echo 2nd parameter : ${2}
fi
增加脚本执行权限:
sudo chmod +x mount.sh
挂载文件系统:
bash mount.sh -m ubuntu_rootfs/
7. 安装必要软件
apt-get update
apt-get install net-tools
apt-get install ethtool
apt-get install ifupdown
apt-get install psmisc
apt-get install nfs-common
apt-get install htop
apt-get install vim
apt-get install rsyslog
apt-get install iputils-ping
apt-get install language-pack-en-base
apt-get install sudo
apt-get install network-manager
8. 安装桌面环境
apt-get install ubuntu-desktop
9. 修改root用户密码
为了方便,我们可以把密码也设置为:
tronlong
passwd root
10. 添加新用户
adduser tronlong
需要输入用户的一些信息,也可以直接回车保留默认值即可:
11. 新用户使用sudo命令
默认情况下新用户是不能使用 sudo 命令的,我们需要修改/etc/sudoers 文件。
/etc/sudoers 文件默认是只读的,因此需要先修改此文件的写权限,使用如下命令:
chmod u+w /etc/sudoers
然后使用 vim 打开/etc/sudoers,找到“root ALL=(ALL:ALL) ALL”这一行,在这一行下面添加:
vim /etc/sudoers
tronlong ALL=(ALL:ALL) ALL
修改完成以后保存退出,重新恢复/etc/sudoers 的只读属性,使用如下命令:
chmod u-w /etc/sudoers
12. 设置主机名称和IP
echo "rk3568" > /etc/hostname
echo "127.0.0.1 localhost" >> /etc/hosts
echo "127.0.0.1 rk3568" >> /etc/hosts
13. 配置DHCP
我们配置一下网络 DHCP,这样系统启动以后就会自动设置好网络
RK3568默认有两个网卡:
网卡eth0:
echo auto eth0 > /etc/network/interfaces.d/eth0
echo iface eth0 inet dhcp >> /etc/network/interfaces.d/eth0
网卡eth1:
echo auto eth1 > /etc/network/interfaces.d/eth1
echo iface eth1 inet dhcp >> /etc/network/interfaces.d/eth1
在实际测试中网口必须接入网线系统才能正常启动,就是在不联网的情况下,每次开机都要等待很久,卡在网络连接上5分钟,这里我们可以修改下面这个文件:
vim /lib/systemd/system/networking.service
将里面的TimeoutStartSec=5min 修改为:
TimeoutStartSec=10sec
14. 修改系统重启默认等待时间
重启开发板的时候,如果有进程没有结束,系统就会等待,默认等待时间很长,导致重启速度慢。
我们可以修改默认等待时间:
vim /etc/systemd/system.conf
找到这几行:
#DefaultTimeoutStartSec=90s
#DefaultTimeoutStopSec=90s
#DefaultTRestartSec=100ms
解除注释并将 DefaultTimeoutStopSec=90s 改为:
DefaultTimeoutStopSec=1s
保存退出
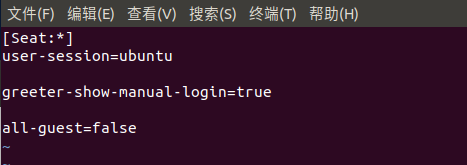
15. 设置开机免密登录到图形界面
我们使用以下命令修改 50-ubuntu.conf 文件:
vim /usr/share/lightdm/lightdm.conf.d/50-ubuntu.conf
在文件末尾加入以下内容,添加完成如下图所示:
greeter-show-manual-login=true
all-guest=false
修改完成后保存退出,然后输入以下命令修改 gdm-autologin 文件内容,修改完成如下图所示:
vim /etc/pam.d/gdm-autologin
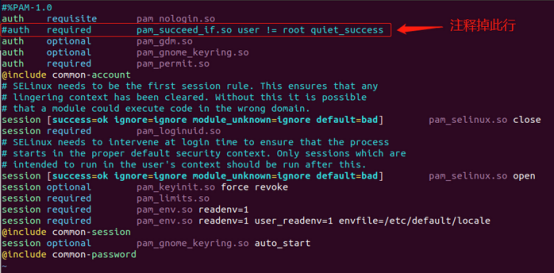
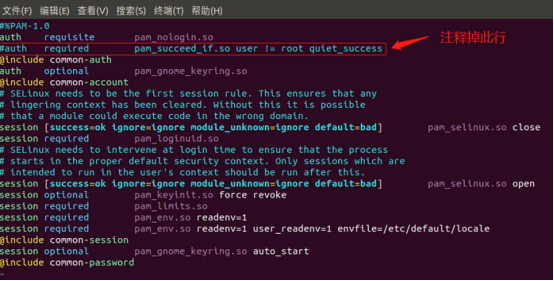
接着输入以下命令修改 gdm-password 文件内容,修改完成如下图所示:
vim /etc/pam.d/gdm-password
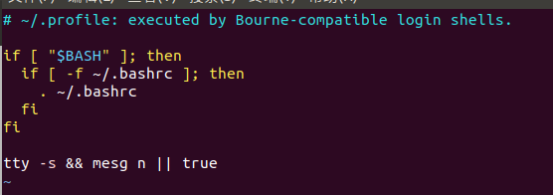
然后输入以下命令修改/root/.profile 文件:
vim /root/.profile
将文件最后一行改为以下内容,修改完成如下图所示:
tty -s && mesg n || true
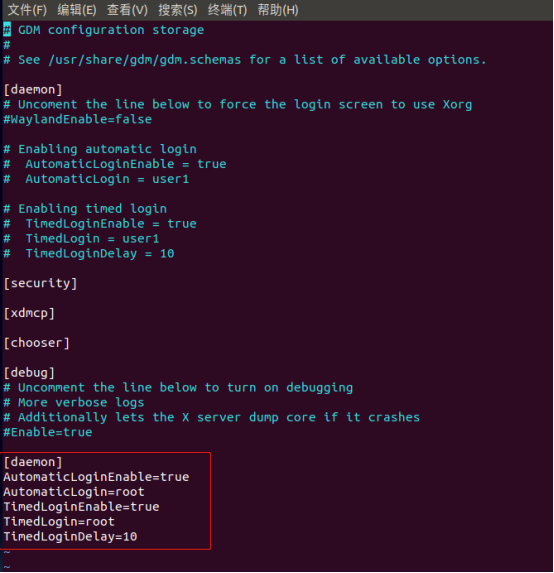
然后输入以下命令修改 custom.conf 文件:
vim /etc/gdm3/custom.conf
到文件末尾添加以下内容,添加完成如下图所示(红框部分):
[daemon]
AutomaticLoginEnable=true
AutomaticLogin=root
TimedLoginEnable=true
TimedLogin=root
TimedLoginDelay=10
17. 禁用系统休眠
查看:
sudo systemctl status sleep.target
禁用:
sudo systemctl mask sleep.target suspend.target hibernate.target hybrid-sleep.target
18. 卸载文件系统
退出仿真环境:
exit
卸载文件系统:
bash mount.sh -u ubuntu_rootfs/
三、打包镜像文件
18. 创建空镜像文件
大小为20480MB(大概20G左右,注意这里需要根据实际EMMC的大小进行修改,以我的为例子是32G版本的EMMC):
dd if=/dev/zero of=ubuntu_rootfs.img bs=1M count=20480
19. 将该文件格式化成ext4文件系统
mkfs.ext4 ubuntu_rootfs.img
20.镜像文件挂载
将该镜像文件挂载到一个空的文件夹上,然后将ubuntu_rootfs的文件复制到该空文件夹中:
mkdir ubuntu_base_rootfs
sudo mount ubuntu_rootfs.img ubuntu_base_rootfs
sudo cp -rfp ubuntu_rootfs/* ubuntu_base_rootfs/
21.修复镜像文件
复制完后用e2fsck修复及检测镜像文件系统,resize2fs 减小镜像文件的大小:
sudo umount ubuntu_base_rootfs/
e2fsck -p -f ubuntu_rootfs.img
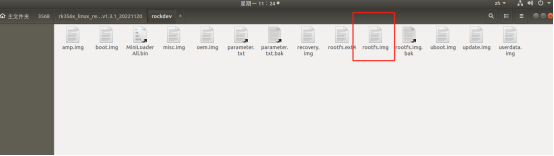
22.修改文件夹名称
将ubuntu_rootfs.img拷贝到SDK的rockdev文件夹,并将ubuntu_rootfs.img改名为rootfs.img:
23.修改parameter.txt文件
这里需要注意要根据实际的emmc大小进行修改,以我为例子是32G版本的EMMC:
修改前:

修改后

0x03200000@0x00058000(rootfs),0x00040000@0x03258000(oem),0x00010000@0x03298000(amp),-@0x032a8000(userdata:grow)
@之前是大小,@之后的是地址
每0x100000为512MB,那么我这里rootfs分配的为25G.当然修改了前面的,后面的oem,amp,userdata的起始地址也需要需改。
然后回到SDK,运行./build.sh updateimg


-
嵌入式
+关注
关注
5082文章
19104浏览量
304763 -
Ubuntu
+关注
关注
5文章
563浏览量
29702 -
实验箱
+关注
关注
0文章
59浏览量
9043
发布评论请先 登录
相关推荐
RK3568国产处理器_教学实验箱_操作教程:1-22 密码学编程实验
国产处理器RK3568教学实验箱操作案例:LED灯控制实验

深度探索RK3568嵌入式教学平台实战案例:设备驱动开发实验
RK3568教学实验箱_操作案例:5-19 超声波测距实验
RK3568教学实验箱_操作教程:5-15 直流电机控制实验
基于RK3568教学实验箱操作案例分享:4-1 LED灯控制实验
深度探索RK3568嵌入式教学平台实战案例:设备驱动开发实验
【北京迅为】《stm32mp157开发板嵌入式linux开发指南》第五章 Ubuntu使用apt-get下载
RK3568J“麒麟”+“翼辉”国产系统正式发布,“鸿蒙”也正在路上!
飞凌嵌入式FET3568/3568J-C核心板现已适配OpenHarmony4.1

为什么更推荐Cortex-A55教学实验箱?我来告诉您!
基于“中国芯”RK3568 ARM Cortex-A55教学实验箱强势首发






 工商网监
工商网监
评论