 浅谈无刷电机的工作流程
浅谈无刷电机的工作流程
上一期的芝识课堂,我们跟大家一起分析了无刷电机的四个功能单元,并详细分析了PWM和逆变器单元的工作情况,今天我们继续来熟悉无刷电机工作流程中另外两个重要的部分——转子位置检测和波形驱动。
转子位置检测是电机控制和驱动过程中不可或缺的一环,是实现电机精确控制和稳定运转的关键,特别是对于需要高精度控制的电机系统,转子位置检测的精度和速度都至关重要。常用的无刷电机转子位置检测有两种方式,即霍尔传感器检测和无传感器检测。
传感器原理
霍尔传感器的原理是检测磁场并输出与其大小成比例的vwin 信号。霍尔传感器的输出通过比较器转换为开关数字信号,然后作为无刷电机的转子位置信号。采用高精度、昂贵的编码器和解析器来检测伺服电机的位置,以实现精确的位置控制。对于2极电机,通过在定子面对转子磁极的位置上,以120度的间隔布置三个霍尔传感器,从而达到每60度检测一次转子位置的目的,如图1所示,霍尔传感器不需要接触就能检测位置,所以具有很高的耐用性,但它对高温敏感,所以并不适用于所有环境。
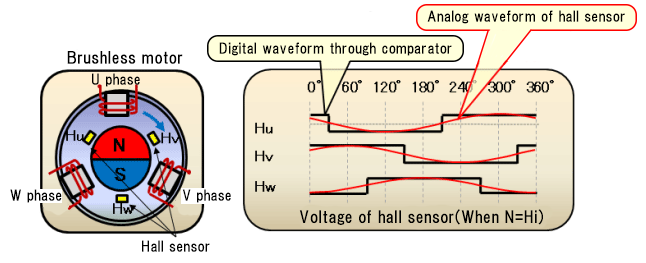
图1 霍尔传感器转子位置检测示意
由于超小型电机没有空间用于安装传感器,或者对于追求性价比的电机来说,传感器价格过于昂贵,因此转子位置可以通过感应电压来检测。此种情况采集通过转子旋转产生的电动势(感应电压)波形来确定位置。目前只有方波驱动可以通过感应电压检测转子位置。U相、V相、W相中的一组线圈始终处于关闭状态。通过检测无激励相线的电机驱动波形的幅度在变为1/2的点,转子位置可以每60度指定一次,具体参考图2所示的流程。值得注意的是,在停止状态下,这种方法存在弊端。由于没有产生电动势,所以无法检测到位置。
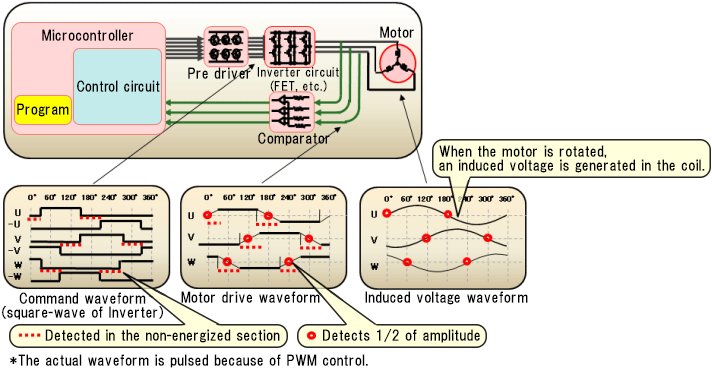
图2通过感应电压进行转子位置检测的详细示意
感应电压只适合方波驱动情况,方波驱动作为最简单的驱动方法,根据转子的旋转角度,切换功率元件的开关状态,然后改变定子线圈的电流方向,使转子旋转。转子转动一次,电流方向就会切换6次。电机驱动采用逆变电路,通过PWM控制电压,如图3所示。该方法与直流有刷电机的驱动原理相同,它是无传感器电机使用最广泛的驱动方法。
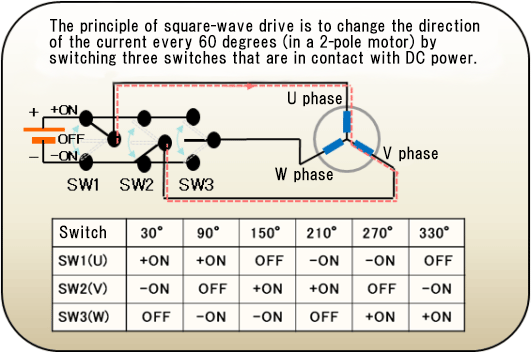
图3方波驱动的位置信息与工作状态示意
与之对应的就是正弦波驱动,根据转子的旋转角度,以正弦的形式连续改变定子线圈的电压,从而使转子旋转。根据频率的不同,电机的3相会有一定的“延迟”。控制时,需要检测转子位置。通常,使用三个位置传感器每隔60度检测一次位置,实时估算转子位置,并输出与转子位置相符的正弦波电压。采用逆变电路驱动电机,通过PWM控制实现电压的连续变化。与方波驱动相比,它的效率更高,产生的振动和噪音更小。
我们通过图4来举例展示方波驱动的过程,如果正弦波为1 Hz,那么“播放”这个正弦波需要一秒钟。如果第二波偏移120度,那么该第二波将在第一波之后0.33秒正好开始,也就是完整时间的三分之一。第三波将再次开始偏移120度,即第一波开始后0.66秒。这是为了适时控制直流无刷电机的U、V、W相。根据3相的时间顺序,电机将顺时针或逆时针旋转。
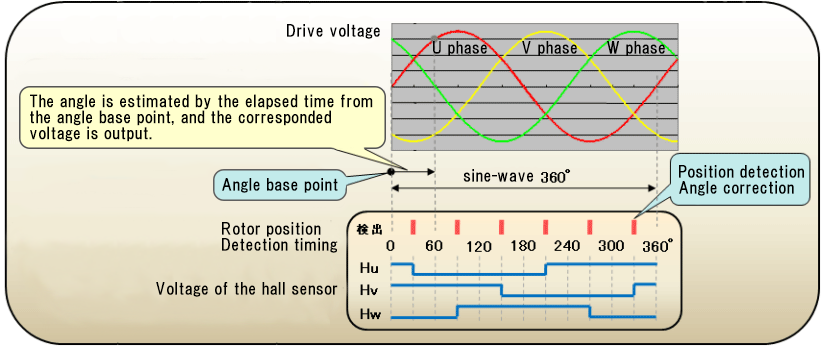
图4正弦波驱动状态示意
经过这两期芝识课堂的学习,我们一起熟悉了整个无刷电机系统的工作状况和驱动细节,操控电机系统的知识已准备就绪,下一期的芝识课堂就将进入实战动手环节,大家可以尝试让电机真正的转起来了!
-
传感器
+关注
关注
2550文章
51035浏览量
753052 -
无刷电机
+关注
关注
57文章
838浏览量
45820 -
位置检测
+关注
关注
0文章
22浏览量
7910
原文标题:芝识课堂—解构无刷电机(下)
文章出处:【微信号:toshiba_semicon,微信公众号:东芝半导体】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论