 自适应控制常用的控制器_自适应控制器的仿真
自适应控制常用的控制器_自适应控制器的仿真
自适应控制技术
随着电力电子技术、微电子技术和信息技术的发展,交流电机驱动控制技术也得到飞速的发展。现代交流传动控制系统总的发展趋势是智能化、模块化、数字化和高频化。电机控制技术进入了以现代控制理论的应用为特征的新的发展阶段。
在日常生活中,所谓自适应是指生物能改变自己的习性以适应新的环境的一种特征。因此,直观地讲,自适应控制器应当是这样一种控制器,它能修正自己的特性以适应对象和扰动的动态特性的变化。
自适应控制的研究对象是具有一定程度不确定性的系统,这里所谓的“不确定性”是指描述被控对象及其环境的数学模型不是完全确定的,其中包含一些未知因素和随机因素。 任何一个实际系统都具有不同程度的不确定性,这些不确定性有时表现在系统内部,有时表现在系统的外部。从系统内部来讲,描述被控对象的数学模型的结构和参数,设计者事先并不一定能准确知道。作为外部环境对系统的影响,可以等效地用许多扰动来表示。这些扰动通常是不可预测的。此外,还有一些测量时产生的不确定因素进入系统。面对这些客观存在的各式各样的不确定性,如何设计适当的控制作用,使得某一指定的性能指标达到并保持最优或者近似最优,这就是自适应控制所要研究解决的问题。
自适应控制和常规的反馈控制和最优控制一样,也是一种基于数学模型的控制方法,所不同的只是自适应控制所依据的关于模型和扰动的先验知识比较少,需要在系统的运行过程中去不断提取有关模型的信息,使模型逐步完善。具体地说,可以依据对象的输入输出数据,不断地辨识模型参数,这个过程称为系统的在线辩识。随着生产过程的不断进行,通过在线辩识,模型会变得越来越准确,越来越接近于实际。既然模型在不断的改进,显然,基于这种模型综合出来的控制作用也将随之不断的改进。在这个意义下,控制系统具有一定的适应能力。
比如说,当系统在设计阶段,由于对象特性的初始信息比较缺乏,系统在刚开始投入运行时可能性能不理想,但是只要经过一段时间的运行,通过在线辩识和控制以后,控制系统逐渐适应,最终将自身调整到一个满意的工作状态。再比如某些控制对象,其特性可能在运行过程中要发生较大的变化,但通过在线辩识和改变控制器参数,系统也能逐渐适应。
常规的反馈控制系统对于系统内部特性的变化和外部扰动的影响都具有一定的抑制能力, 但是由于控制器参数是固定的,所以当系统内部特性变化或者外部扰动的变化幅度很大时,系统的性能常常会大幅度下降,甚至是不稳定。所以对那些对象特性或扰动特性变化范围很大,同时又要求经常保持高性能指标的一类系统,采取自适应控制是合适的。但是同时也应当指出,自适应控制比常规反馈控制要复杂的多,成本也高的多,因此只是在用常规反馈达不到所期望的性能时,才会考虑采用。
自适应控制常用的控制器
控制器是自适应控制系统的重要基础,是实现既定控制策略和保障控制性能的重要环节。以下介绍几种控制器基于线性理论下的控制方法。线性控制的结构如图4所示
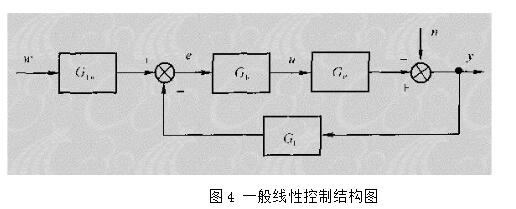
Gf前置滤波器;Gk前向通道控制器;Gp被控过程(对象)Gz反馈环节控制器;n输出干扰;u控制信号;R参考输入;y系统输出
1、一般的线性控制器
一般的控制器可描述为:

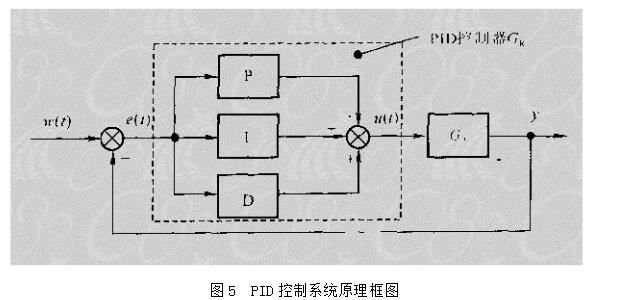
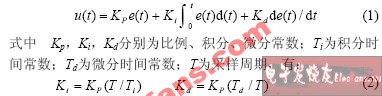
2、PID控制器
PID控制器是一种具有固定结构形式的线性控制器,其原理图如图5所示

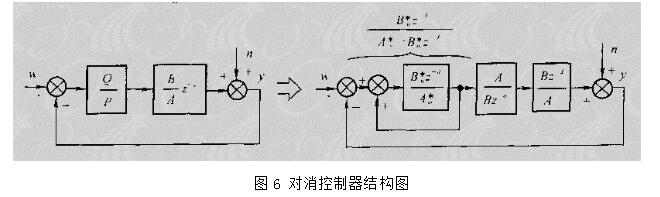
3、对消控制器

控制器的结构图如图6所示
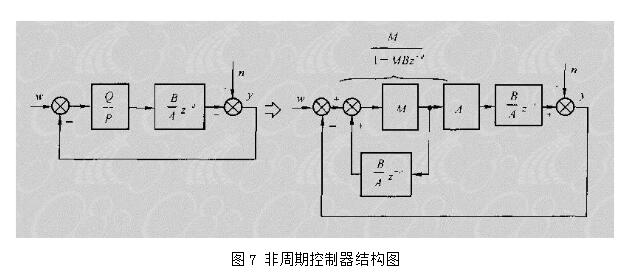
非周期控制器 控制的传递函数为:

其他控制器预报控制器、最小方差控制器、广义预报控制器、状态控制器、状态观测器和卡尔曼滤波器和谨慎控制器等 。
自适应控制器的仿真
以应用较为广泛的自矫正PID控制为例自校正PID控制,实质上是一种极点配置法,就是通过调整PID控制器的结构和参数,使闭环系统的特征多项式变成预定的式子,这种PID控制表达式离原本的PID表达式已经很远了。自校正离散的PID控制。
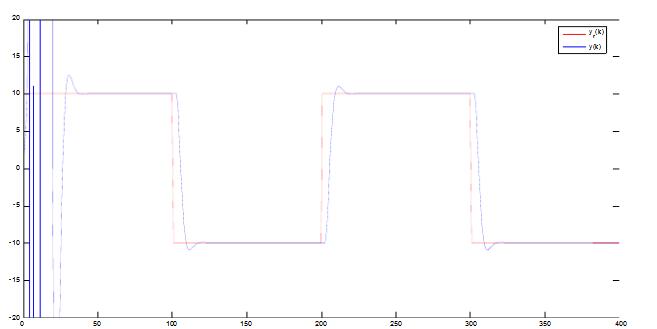
输出的基准与实际输出对比:
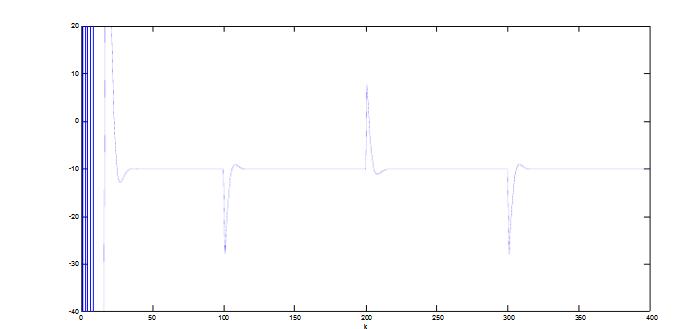
输入初值u:
参数估计a:
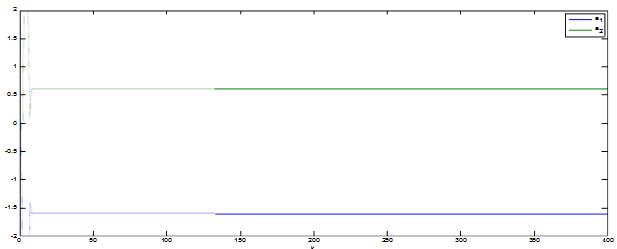
参数估计b
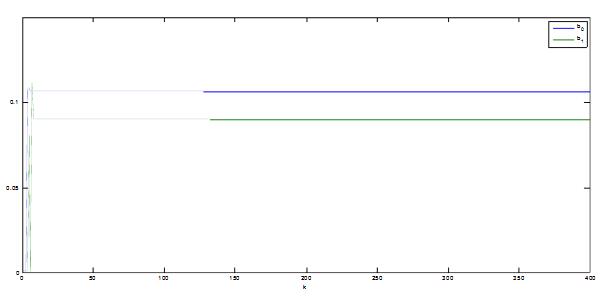
由图中可以看出,自校正PID控制过程的输出和参考模型的输出基本一致,可见该系统取得了较好的控制效果。
-
自适应控制
+关注
关注
1文章
36浏览量
11751
发布评论请先 登录
相关推荐
基于MATLAB的时变系统自适应控制的仿真
单神经元自适应PID控制器设计方法研究
自适应跟踪输出控制器的设计和仿真
机械手自适应模糊控制器设计
参数自适应模糊PID控制器的设计
时变非线性系统的自适应逆控制仿真

基于分层模糊系统的自适应H∞控制器设计






 工商网监
工商网监
评论