 超宽带定位有哪几种常用的算法(三种方法详解)
超宽带定位有哪几种常用的算法(三种方法详解)
超宽带定位是一种非常先进而且精准的技术,可以满足现在各种远距离无线通信的需求。在使用具有优势的超宽带定位技术时,要想获得精确的定位就要使用合理的算法,那么有哪些常见的超宽带定位算法呢?下面小编来为大家简单的介绍几个常见算法。
超宽带定位有哪几种常用的算法
1、RSS法
超宽带定位在使用RSS算法的时候可以通过测量节点间的能量来估计目标与接收机之间的距离,由于接收信号的强度与传播的距离成反比,因此,距离的估算可以通过发射信号的强度和接收信号的强度利用衰减模型繁衍得到。超宽带定位的这种算法操作简单,而且成本也很低,但是在计算时需要考虑多径衰弱和阴影效应的影响。
2、AOA法
AOA算法能测量未知点和参考点之间的角度并计算目标的位置。超宽带定位系统通过多个基站测量从定位目标最先到达接收机的信号的到达角度,从而估计出定位目标的位置。如果区域内的障碍物比较少,则可以利用AOA算法获得较高的定位精度,但是如果定位区域内的障碍物比较多,那么就要考虑多径效应的影响。
3、TOA/TDOA法
当超宽带定位使用AOA方法来计算时,由于多路径效应和接收机天线的限制,往往需要较多的传感器同时工作,这样会增加系统的应用成本。而利用TOA/TDOA联合定位算法,可以减少同时工作的传感器数量,并且获得待定位目标的三维坐标。
TOA即“到达时间”,这种方式定位是通过Anchor和Tag之间的多次通信实现的,如下图:
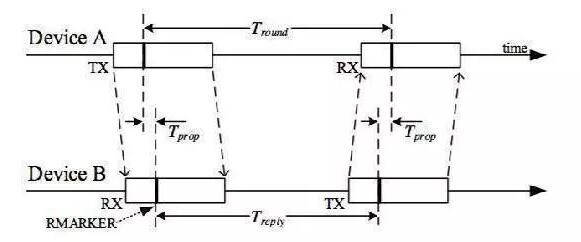
1、Anchor首先发给Tag一个包,同时记录下Anchor当前的时间信息,记为T1。
2、Tag收到基站的信息,返回一个ACK。
3、 Anchor收到Tag的ACK,记录当前的时间信息,记为T2。
4、Anchor计算时间差Tr = T2 - T1,并且根据此计算出距离。
d = c * Tr / 2 其中c为光速。
当然,实际应用中为了更加靠谱,往往不仅仅是利用两次通信来测距,还会有更加复杂的多次通信来提高精度。
对于空间定位,只需要利用SX(球面相交法)便可以得出最后的坐标。
可见,为了一次定位,每个Anchor和Tag之间要进行两次通信,故又将这种定位方式称为“Two-way-ranging”。这种定位的优势在于其实现的便捷性和对硬件的宽容,只需要有几个摆放在不同位置的Anchor和一个Tag便可进行定位,而缺点嘛。。。首先自然是定位速度了,其次,由于每次通信的质量无法保证,而一对Anchor/Tag又无法做自我的校准,精度自然也会受到影响。
TODA即“到达时间差”,这种方式的一次测距是由两个Anchor和一个Tag实现的。在这种模式下,多个时钟完全同步的Anchor同时接受来自一个Tag的包,对于不同位置的Anchor,同一个Tag的同一次广播包到达的时间是不同的,所以便有有以下算法:
1、Tag发出一个广播包。
2、 两个Anchor接收到同一个包,Anchor1接收到的时间为T1,Anchor2接收到的时间为T1。
3、计算时间差Td = T2 - T1。
4、 对于至少四个Anchor,可以得到三组这样的两两之间的信息。
5、通过数学方法(multi-lateration)可以解算出Tag的空间坐标。
由于算法比较复杂,这里不再赘述。由此可见,TDOA的优势首先在于一次定位的通信次数显著减少,其次由于是用时间差而非绝对时间进行测距,其精度也比TOA高出一些。但优势总是以一些代价换来的,TDOA系统中各个Anchor的时钟必须严格同步,由于这种定位本质上是依赖于光速的,所以1ns的固有时钟误差便可以造成30cm的固有距离误差,这一点显然是不可接受的。而要打造一个间距比较大的精确同步系统成本又是比较高昂的。
-
RSS
+关注
关注
1文章
33浏览量
12339 -
TOA
+关注
关注
0文章
10浏览量
14534 -
AOA
+关注
关注
1文章
61浏览量
13926
发布评论请先 登录
相关推荐
“三维六步”干扰排查有哪几种方法?资料下载

硅片有哪几种晶向?有几种定位边?定位边是如何定位的?





 工商网监
工商网监
评论