 基于模糊控制算法的智能车转向舵机控制
基于模糊控制算法的智能车转向舵机控制
模糊控制算法概述
模糊控制算法是指用于控制变频器的电压和频率的算法,使电动机的升速时间得到控制,以避免升速过快对电动机使用寿命的影响以及升速过慢影响工作效率。模糊控制的关键在于论域、隶属度以及模糊级别的划分,这种控制方式尤其适用于多输入单输出的控制系统。
模糊逻辑控制(Fuzzy Logic Control)简称模糊控制(Fuzzy Control),是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制技术。1965年,美国的L.A.Zadeh创立了模糊集合论;1973年他给出了模糊逻辑控制的定义和相关的定理。1974年,英国的E.H.Mamdani首次根据模糊控制语句组成模糊控制器,并将它应用于锅炉和蒸汽机的控制,获得了实验室的成功。这一开拓性的工作标志着模糊控制论的诞生。模糊控制实质上是一种非线性控制,从属于智能控制的范畴。模糊控制的一大特点是既有系统化的理论,又有大量的实际应用背景。模糊控制的发展最初在西方遇到了较大的阻力;然而在东方尤其是日本,得到了迅速而广泛的推广应用。
模糊控制工作原理

从模糊控制器的构成我们知道,输入模糊化,模糊推理,去模糊化是实施模糊控制的三个主要环节。有时根据这三个环节的作用分别称为:模糊器,模糊推理机和解模糊器。所以要学会使用模糊控制,主要就是弄明白这三个部分的实现方法。
基于模糊控制算法的智能车转向舵机控制
1、智能车寻迹误差模型建立
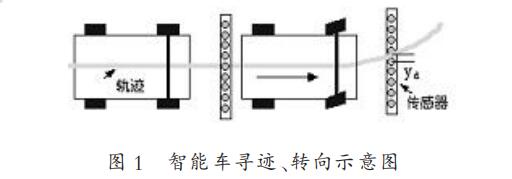
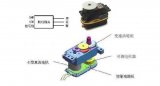
智能车的导向控制利用光电传感器对路径进行识别,然后根据车辆与路径标线之间的相对位置偏差控制车辆的运行方向,保证车沿着路径标线运行。我们选择了光电传感器寻迹方案作为控制的输入途径。如图1所示小车前排为光电传感器,r为两两相临之间的传感器距离,yn为正中光电传感器与检测到路径传感器之间的距离,位于轨迹上方的为正,下方的为负,则:yn=(m-5)×r(1)
其中:m为检测到轨迹的传感器的位置。
2、模糊控制的引入
分析系统后可知,由于小车机械部分以及电路部分的复杂性,使得系统很难建立精确的数学模型。因此,我们在这里考虑使用模糊控制的办法,从理论上建立模糊控制过程,以完善整体控制体系。模糊控制过程如图2所示。
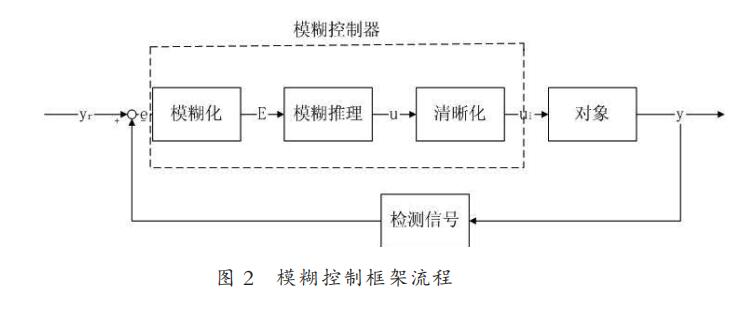
Yr:系统输出,即小车舵机偏转方向。
Y:系统设定输入,即寻迹线上小车的正方向中央位置。
图中模糊控制器由单片机编程模块实现,反馈信号由红外对管传感器模块采集,控制对象为小车舵机偏转方向与角度。
其中模糊控制器的设计如下:
1)模糊化小车偏离位置
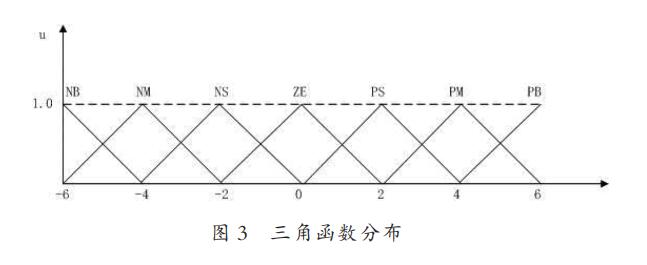
设小车左偏方向为负方向,右偏方向为正方向,其偏离范围e(论域,单位为cm)为[-7.5,7.5],在将论域离散化为整数集E=[-6,-5,…,5,6],则量化因子k=n/x=12/15=0.8。
接下来做如下设定:
“负大”(NB):[-6,-4],左偏特大。
“负中”(NM):[-6,-2],左偏较大。
“负小”(NS):[-4,0],左偏较小。
“零”(ZE):[-2,2],正中。
“正小”(PS):[0,4],右偏较小。
“正中”(PM):[2,6],右偏较大。
“正大”(PB):[4,6],右偏特大。
设隶属函数为三角函数分布,如图3所示。
用表1表示偏离位置的语言变量值表。
2)模糊化控制量u(偏转方向与角度)
u的论域为[-36,36],将其离散化为整数集N=[-6,-5,…,5,6]。取PB,PM,PS,ZE,NS,NM,NB七个语言变量值档次,与偏离位置类似表1以下语言变量值表2。

3)控制规则
控制规则如表3所示。

4)模糊推理
采用CRI推理查表法,即直接通过输入量(偏差E)与控制规则比较得出控制量(偏转角U)。
5)模糊量的清晰化
采用重心法,即将模糊化的输出量(模糊集)的各个元素与其对应的论域值相乘取平均值,用公式表示如下:
3、舵机转向系统的控制策略及算法
基于前面的模糊控制模型,程序算法的设计包括:对传感器检测到的信号进行量化(便于模糊化处理),对应舵机偏转角的计算。另外为了避免从直道入弯的过冲,和从弯道进入直道的振荡问题,程序中还需要对速度进行控制。
1)量化的过程
为了方便处理,我们将所得到的传感器的信号量化到[1,2,3,…,22,23,24],具体量化过程如下:
a.将传感器(传感器的布局见传感器模块)从右至左依次编号为1,2,…,11,12。
b.由于传感器分布比较密,可能会出现几个(一般为一到两个)传感器同时检测到黑线的情况,取其中的最大和最小值之和作为检测到的参数(如果只有一个传感器检测到黑线,那么最大值与最小值相同)。
2)舵机偏转角的计算
对于这个模糊控制问题来说,整个推理过程较为简单,没必要通过设计专门的程序来计算,我们是通过计算来得到最后的舵机偏转角,具体计算推理过程如下:
a.如前所述,将传感器的设计位置投影到基准线上得到的对应偏差从左到右依次为-7.5,-6.7,…,6.7,7.5。其中-7.5,-5,-2.5,0,2.5,5,7.5与整数集E的-6,-4,-2,0,2,4,6对应,近似与上面的量化处理之后的24,20,16,13,10,6,2对应。这样的话,上面的量化结果可用Zadeh表示法来表示其在论域E上的模糊集合,如:19的位置可以表示为
b.由控制规则知,N中的-6,-4,-2,0,2,4,6对应的输出结果(偏转角度模糊量E)依次为-6,-4,-2,0,2,4,6。通过模糊推理之后,可得到各量化结果的输出量(模糊量),可用Zadeh表示法表示在论域U上,如19对应的输出结果(模糊量)可以表示为
c.再通过重心法清晰化后得到各量化结果对应的输出结果,如-2对应的输出结果为7度,-4对应的结果大约为21度,则19对应的输出结果(清晰量)为0.25×7+21×0.75=17.5。
d.另外为了使得传感器在直道上跑的时候比较平稳,量化值10到16的输出结果做适当调整,使得中间的12,13,14的对应的输出量为0度,其它的相应调整使得角度变化较为平均。
3)速度的控制
由于釆用匀速时,当小车从直道入弯时,可能会产生过冲,和从弯道进入直道有时会有振荡,所以必须要调节速度。具体做法是:在检测到传感器偏出时立即减速,当从偏出回到中心位置时再恢复原速。
4、试验结果
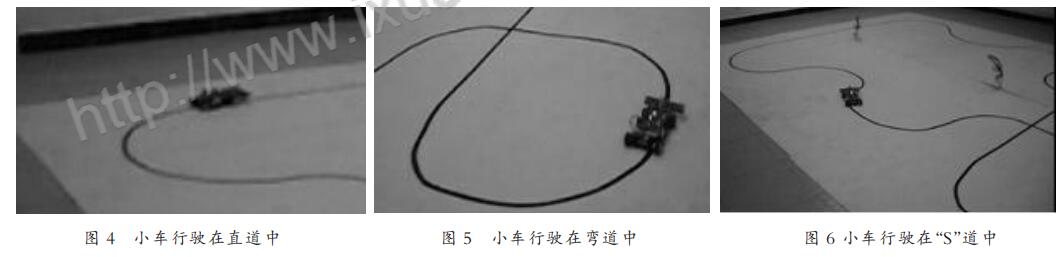
实验结果表明,把制作好的智能小车放到特定的轨道上进行试验,如图4、图5、图6,小车都能够很好的、快速的在规定的轨道内行驶。基于模糊控制的转向控制器在直线、“S”形路径和大转弯路径处行驶时都可以实现智能车辆的转向控制,转向稳定性较好。
制台调用学习模块,配置和调整隶属函数和权重值,从而适宜外界环境的变化;另一方面当工作方式为在线状态下,IIDS系统主要是针对非法用户行为进行检测,首先搜索存储系统Mysql数据库中的三类行为记录表,如果在某类表中存在且次数大于等于三次的用户,则直接触发响应机制;否则,则采用模糊综合评判分析法对此非法行为进行检测,最后再触发响应机制。
智能响应模块采用的是主动响应,而不是被动响应。它根据不同的入侵行为主动采取相应的措施,它通过与防火墙的联动来阻止入侵,并对存储系统进行动态修改。
网格管理控制平台:它是基于网格的入侵检测系统的集中控制管理单元,通过该系统的统一控制,使得新建的入侵检测网格子系统与其他已经存在的各个子系统通过统一的规范,实现各子系统的互通、互联和互操作,在网格管理控制平台的统一协调控制下发挥出入侵检测网格系统的最大功用。
-
智能车
+关注
关注
21文章
403浏览量
76951 -
模糊控制算法
+关注
关注
0文章
6浏览量
3900 -
转向控制
+关注
关注
0文章
2浏览量
2082
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论