 一种基于PWM快速产生模拟电压的方法
一种基于PWM快速产生模拟电压的方法
什么是PWM
脉冲宽度调制是利用微处理器的数字输出来对vwin 电路进行控制的一种非常有效的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中。
脉冲宽度调制是一种模拟控制方式,其根据相应载荷的变化来调制晶体管基极或MOS管栅极的偏置,来实现晶体管或MOS管导通时间的改变,从而实现开关稳压电源输出的改变。这种方式能使电源的输出电压在工作条件变化时保持恒定,是利用微处理器的数字信号对模拟电路进行控制的一种非常有效的技术。
PWM控制技术以其控制简单,灵活和动态响应好的优点而成为电力电子技术最广泛应用的控制方式,也是人们研究的热点。由于当今科学技术的发展已经没有了学科之间的界限,结合现代控制理论思想或实现无谐振波开关技术将会成为PWM控制技术发展的主要方向之一。其根据相应载荷的变化来调制晶体管基极或MOS管栅极的偏置,来实现晶体管或MOS管导通时间的改变,从而实现开关稳压电源输出的改变。这种方式能使电源的输出电压在工作条件变化时保持恒定,是利用微处理器的数字信号对模拟电路进行控制的一种非常有效的技术。
PWM详细过程
脉冲宽度调制(PWM)是一种对模拟信号电平进行数字编码的方法。通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。PWM信号仍然是数字的,因为在给定的任何时刻,满幅值的直流供电要么完全有(ON),要么完全无(OFF)。电压或电流源是以一种通(ON)或断(OFF)的重复脉冲序列被加到模拟负载上去的。通的时候即是直流供电被加到负载上的时候,断的时候即是供电被断开的时候。只要带宽足够,任何模拟值都可以使用PWM进行编码。
多数负载(无论是电感性负载还是电容性负载)需要的调制频率高于10Hz,通常调制频率为1kHz到200kHz之间。
许多微控制器内部都包含有PWM控制器。例如,Microchip公司的PIC16C67内含两个PWM控制器,每一个都可以选择接通时间和周期。占空比是接通时间与周期之比;调制频率为周期的倒数。执行PWM操作之前,这种微处理器要求在软件中完成以下工作:
1、设置提供调制方波的片上定时器/计数器的周期
2、在PWM控制寄存器中设置接通时间
3、设置PWM输出的方向,这个输出是一个通用I/O管脚
4、启动定时器
5、使能PWM控制器
如今几乎所有市售的单片机都有PWM模块功能,若没有(如早期的8051),也可以利用定时器及GPIO口来实现。更为一般的PWM模块控制流程为(笔者使用过TI的2000系列,AVR的Mega系列,TI的LM系列):
1、使能相关的模块(PWM模块以及对应管脚的GPIO模块)。
2、配置PWM模块的功能,具体有:
①:设置PWM定时器周期,该参数决定PWM波形的频率。
②:设置PWM定时器比较值,该参数决定PWM波形的占空比。
③:设置死区(deadband),为避免桥臂的直通需要设置死区,一般较高档的单片机都有该功能。
④:设置故障处理情况,一般为故障是封锁输出,防止过流损坏功率管,故障一般有比较器或ADC或GPIO检测。
⑤:设定同步功能,该功能在多桥臂,即多PWM模块协调工作时尤为重要。
3、设置相应的中断,编写ISR,一般用于电压电流采样,计算下一个周期的占空比,更改占空比,这部分也会有PI控制的功能。
4、使能PWM波形发生。
PWM信号产生电路
开关电源他激控制方式有脉宽调制(PWM)和脉频调制(PFM),其中,大部分都采用PWM方式,因此,现简介PWM控制原理。图所示为PWM信号产生电路框图及工作波形,其工作过程如下:对被控制电压Uo。进行检测所得的反馈电压Ur加至放大器Al的同相输入端,固定的参考电压Uo加至A1的反相输入端。经A1放大后的直流误差电压Ue加至比较器A2的反相输入端,由固定频率振荡器产生的锯齿波信号Usa加至A2的同相输入端。A2输出方波信号,其占空比随误差电压而变化,即实现了脉宽调制。对于单管变换器,A2输出的PWM信号即可作为控制功率晶体管的开关信号,对于推挽或桥式等功率变换电路,则应将PWM信号分为两组信号,即分相。分相电路由触发器及两个“与”门组成,触发器的时钟信号对应于锯齿波的下降沿。A端和B端输出两组相差180°的PWM信号。

(a)PWM信号产生电路框图;(b)工作波形
基于PWM快速产生模拟电压的方法
1、概述
在电子和自动化技术的应用中,数字信号转换模拟控制信号输出是电子设计中常见的问题,然而许多单片机内部并没有集成数摸转换器(DAC)。当然市场上也有一些专用的D/A转换芯片,但这类芯片价格昂贵,并且需要多个处理器功能管脚来控制,这对一般的简单应用是不适合的。
所以在有些应用中,由单片机的PWM输出(或者通过定时器和软件一起来实现PWM输出),经过简单RC滤波电路实现DAC来得到模拟电压是一种比较好的选择。然后,这种方法的一个缺点就是电平转换时间过长,本文提出了一种新的方法来克服该问题。
2、RC滤波电路
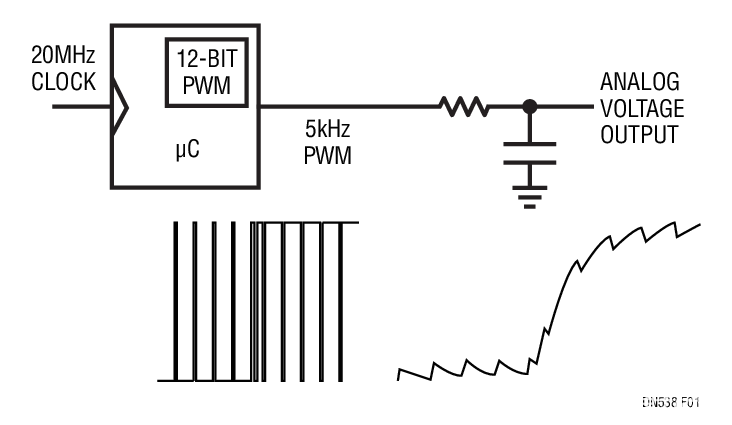
图1是传统的RC滤波电路,PSoC通过GPIO口和RC滤波产生模拟电压
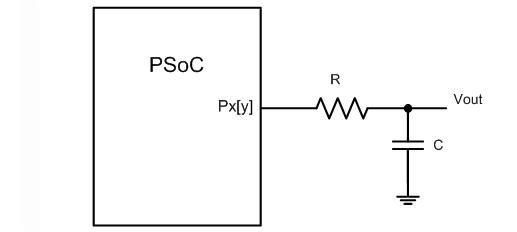
图1,RC滤波电路产生模拟电压
在这种方法中,PWM通过Px[y]输出,Vout即是需要的模拟电压。PWM的输出在电压VDD和0之间变换,PWM的占空比(DC)决定Vout的输出值。增加DC输出电压也会跟着增加(当DC=0%时,Vout=GND;当DC=100%时,Vout=VDD)。
这种方法比较简单,但缺点是电平转换时间长。例如,当DC从一个值变到另一个值时,可能要几个ms才能使Vout从一个电压变换到最终的稳定电压,如图2所示。
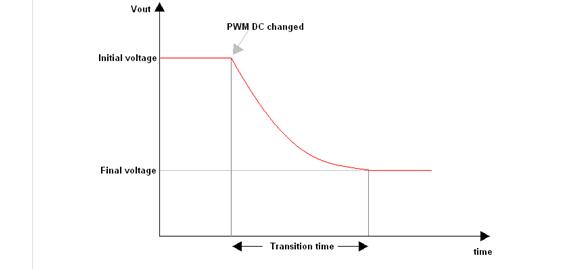
图2,RC滤波电路的电平转换时间
较长的电平转换时间在有些应用中是不适用的,下面我将提供一个新的方法来减小该时间。当然,也可通过减小电容电阻(RC)值并提高PWM频率来缩短电平转换时间,但有些单片机的固有缺陷而没办法提高PWM频率时就没办法了。
3、电压跟随器电路
本文介绍一种新的方法能把转换时间减小到几十us,该方法除了RC滤波外,还使用了电阻、三极管以及另外一个GPIO口,三极管设计为电压跟随器模式,如下图3所示:
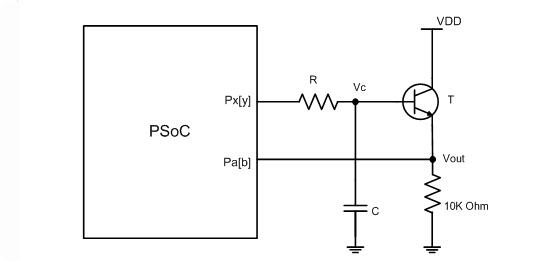
图3,电压跟随器电路产生模拟电压
三极管T是模拟电压Vc到Vout的开关。在空闲状态下设置Pa[b]为“strongdrive”模式,并置为高电平(逻辑1),这样,Vout=VDD,下列步骤将使Vout从空闲状态变换到指定的电压状态。
1)使能PWM并设定为指定的占空比DC。在计算PWN占空比时要考虑到三极管be间的压降(Vbe)。Vc=Vout+Vbe,得出DC=(Vout+Vbe)/VDD.
2)做足够长时间的延迟以使Vc稳定在指定的电压,注意在这延迟的时间内Vout保持高电平VDD。
3)设置GPIO口Pa[b]的驱动模式为“High-Zanalog”,这将导致三极管T工作状态并且Vout将立即变为指定的最终电压(只需要几十个微秒)。
下列步骤将使Vout从指定的电压变换到空闲状态(Vout=VDD)
1)设置Pa[b]的驱动模式为“strongdrive”并置该PIN为高电平,Vout将立即变为VDD.
2)如果需要,此时可停止Px[y]口的PWM以减小功耗。
电平转换如图4所示,当Vc在电压下降的非稳态过程中,Vout还保持高电平。
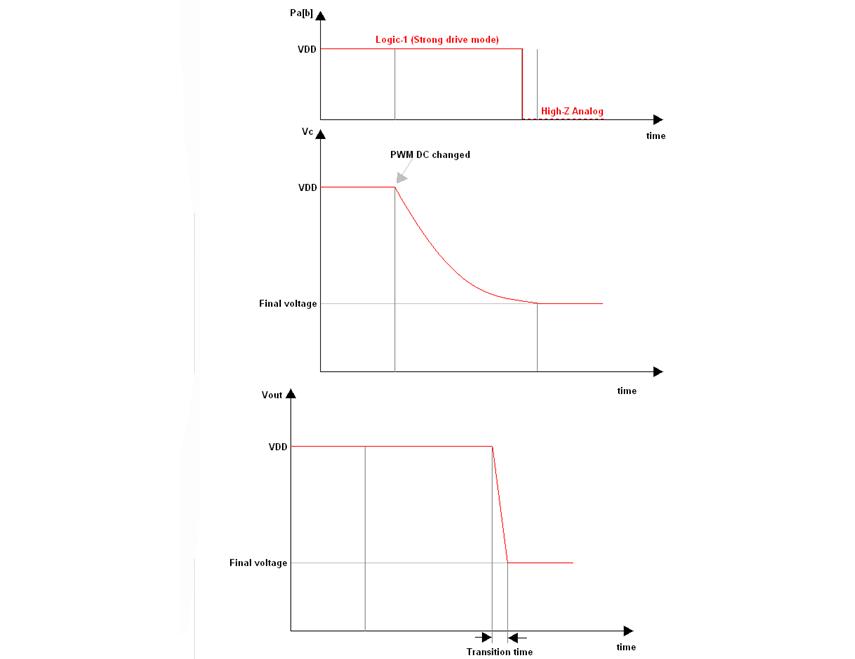
图4,电压跟随器电路的电平转换时间
4、实验和测试结果
在Cypress的CY8C20x24系列芯片中,无PWM模块,所以若需要输出模拟电压就只能使用内部的TImer13模块产生PWM,然后使用外围电路产生模拟电压。下面以CY8C20224芯片为例来说明两种模拟电压产生方法的测试情况。
1)使用RC电路做测试
由于CY8C20224提供的Timer13其输入时钟为32KHz,所以由此产生的PWM频率比较低。为了减小模拟电压值的纹波,必须提高RC电路的电阻电容值。在实验电路中R=47K,C=0.1uF。下图5是用示波器抓到的波形。
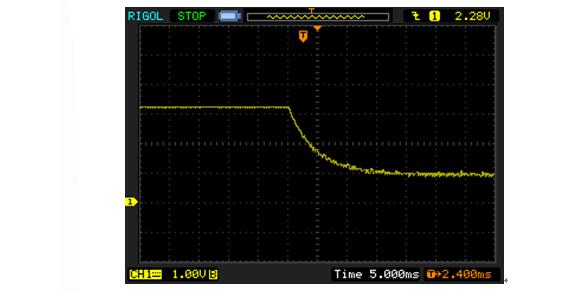
图5,RC滤波电路的电平转换波形
从上图可以看出,当电压从空闲状态(VDD=3.3V)变换到稳定电压1.0V时,大约需要13~15ms.
这在有些应用中是不够的。
2)采用电压跟随器电路测试
若采用电压跟随器电路,电压从空闲状态(VDD=3.3V)变换到稳定电压1.0V时,需要的时间不超过50us,如下图6所示:

图6,电压跟随器电路的电平转换波形
-
PWM
+关注
关注
114文章
5181浏览量
213783 -
模拟电压
+关注
关注
6文章
64浏览量
18293
发布评论请先 登录
相关推荐
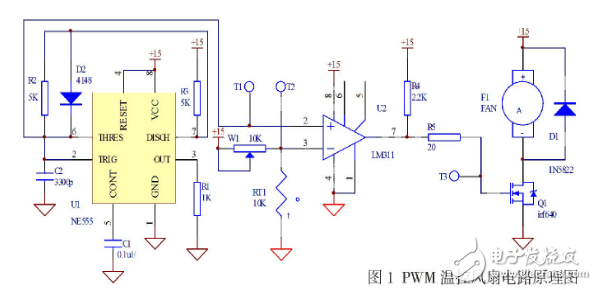
一种简易PWM温控风扇电路设计
基于RC滤波电路的PWM快速产生模拟电压的方法介绍
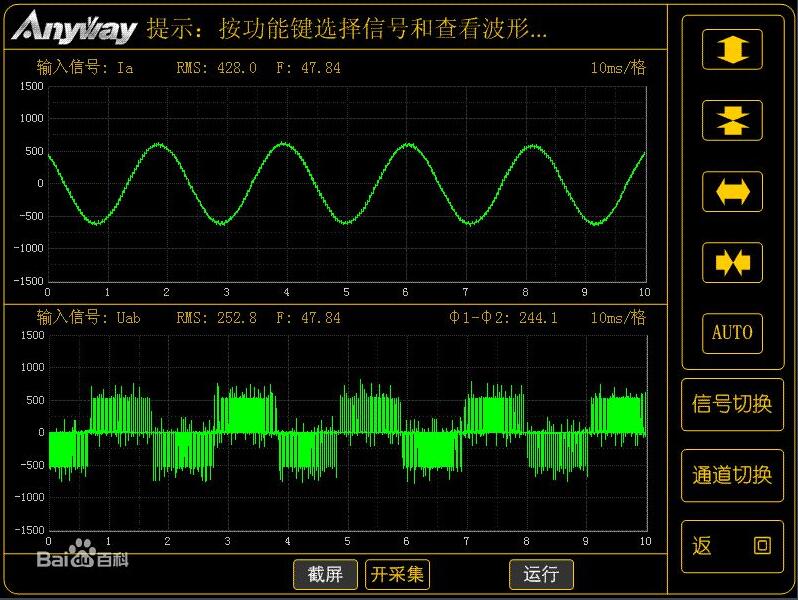
一种简单的三相电压型PWM 整流器控制方法
一文解析从数字PWM信号获得准确、快速稳定的模拟电压

来自数字PWM信号的准确、快速建立模拟电压





 工商网监
工商网监
评论