 机器人控制系统的基本单元与机器人控制系统的特点分析
机器人控制系统的基本单元与机器人控制系统的特点分析
机器人控制系统概念
机器人控制系统是指由控制主体、控制客体和控制媒体组成的具有自身目标和功能的管理系统。控制系统意味着通过它可以按照所希望的方式保持和改变机器、机构或其他设备内任何感兴趣或可变化的量。控制系统同时是为了使被控制对象达到预定的理想状态而实施的。控制系统使被控制对象趋于某种需要的稳定状态。
机器人控制系统特点
机器人的控制技术是在传统机械系统的控制技术的基础上发展起来的,因此两者之间并无根本的不同。但机器人控制系统也有许多特殊之处。其特点如下:
1、机器人控制系统本质上是一个非线性系统。引起机器人非线性因素很多,机器人的结构、传动件、驱动元件等都会引起系统的非线性。
2、机器人控制系统是由多关节组成的一个多变量控制系统,且各关节间具有耦合作用。具体表现为某一个关节的运动,会对其他关节产生动力效应,每一个关节都要受到其他关节运动所产生的扰动。因此工业机器人的控制中经常使用前馈、补偿、解耦和自适应等复杂控制技术。
3、机器人系统是一个时变系统,其动力学参数随着关节运动位置的变化而变化。
4、较高级的机器人要求对环境条件、控制指令进行测定和分析,采用计算机建立庞大的信息库,用人工智能的方法进行控制、决策、管理和操作,按照给定的要求,自动选择最佳控制规律。
机器人控制系统的基本要求
从使用的角度讲,机器人是一种特殊的自动化设备,对其控制有如下要求:
1、多轴运动的协调控制,以产生要求的工作轨迹。因为机器人的手部的运动是所有关节运动的合成运动,要使手部按照规定的规律运动,就必须很好地控制各关节协调动作,包括运动轨迹、动作时序的协调。
2、较高的位置精度,很大的调速范围。除直角坐标式机器人外,机器人关节上的位置检测元件通常安装在各自的驱动轴上,构成位置半闭环系统。此外,由于存在开式链传动机构的间隙等,使得机器人总的位置精准度降低,与数控机床比,约降低一个数量级。但机器人的调速范围很大,通常超过几千。这是由于工作时,机器人可能以极低的作业速度加工工件;空行程时,为提高效率,又能以极高的速度移动。
3、系统的静差率要小,即要求系统具有较好的刚性。这是因为机器人工作时要求运动平稳,不受外力干扰,若静差率大将形成机器人的位置误差。
4、位置无超调,动态响应快。避免与工件发生碰撞,在保证系统适当响应能力的前提下增加系统的阻尼。
5、需采用加减速控制。大多数机器人具有开链式结构,其机械刚度很低,过大的加减速度会影响其运动平稳性,运动启停时应有加减速装置。通常采用匀加减速指令来实现。
6、各关节的速度误差系数应尽量一致。机器人手臂在空间移动,是各关节联合运动的结果,尤其是当要求沿空间直线或圆弧运动时。即使系统有跟踪误差,仍应要求各轴关节伺服系统的速度放大系数尽可能一致,而且在不影响稳定性的前提下,尽量取较大的数值。
7、从操作的角度看,要求控制系统具有良好的人机界面,尽量降低对操作者的要求。因此,在大部分的情况下,要求控制器的设计人员完成底层伺服控制器设计的同时,还要完成规划算法,而把任务的描述设计成简单的语言格式由用户完成。
8、从系统的成本角度看,要求尽可能地降低系统的硬件成本,更多的采用软件伺服的方法来完善控制系统的性能。
机器人控制系统的功能要求
1、记忆功能:存储作业顺序、运动路径、运动方式、运动速度和与生产工艺有关的信息。
2、示教功能:离线编程,在线示教,间接示教。在线示教包括示教盒和导引示教两种。
3、与外围设备联系功能:输入和输出接口、通信接口、网络接口、同步接口。
4、坐标设置功能:有关节、绝对、工具、用户自定义四种坐标系。
5、人机接口:示教盒、操作面板、显示屏。
6、传感器接口:位置检测、视觉、触觉、力觉等。
7、位置伺服功能:机器人多轴联动、运动控制、速度和加速度控制、动态补偿等。
8、故障诊断安全保护功能:运行时系统状态监视、故障状态下的安全保护和故障自诊断。
机器人控制系统的主要种类
控制系统的任务,是根据机器人的作业指令程序、以及从传感器反馈回来的信号,支配机器人的执行机构去完成的运动和功能。 假如机器人不具备信息反馈特征,则为开环控制系统;若具备信息反馈特征,则为闭环控制系统。
根据控制原理可分为程序控制系统、适应性控制系统和人工智能控制系统。
根据控制运动的形式可分为点位控制和轨迹控制。
机器人控制系统的基本单元
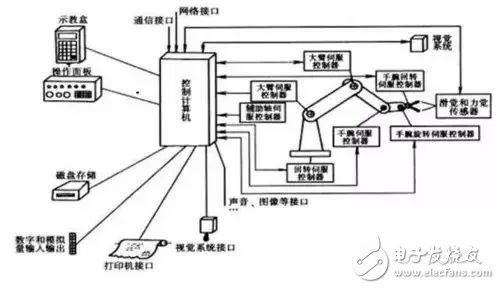
1、控制计算机:控制系统的调度指挥中心机构。
2、示教盒:示教机器人的工作轨迹和参数设定,以及所有人机交互操作,拥有自己独立的CPU以及存储单元,与主计算机之间以串行通信方式实现信息交互。
3、操作面板:由各种操作按键、状态指示灯构成,只完成基本功能操作。
4、硬盘和软盘存储存:储机器人工作程序的外围存储器。
5、数字和vwin 量输入输出:各种状态和控制命令的输入或输出。
6、打印机接口:记录需要输出的各种信息。
7、传感器接口:用于信息的自动检测,实现机器人柔顺控制,一般为力觉、触觉和视觉传感器。
8、轴控制器:完成机器人各关节位置、速度和加速度控制。
9、辅助设备控制:用于和机器人配合的辅助设备控制,如手爪变位器等。
10通信接口:实现机器人和其他设备的信息交换,一般有串行接口、并行接口等。
11、网络接口
1)Ethernet接口:可通过以太网实现数台或单台机器人的直接PC通信,数据传输速率高达10Mbit/s,可直接在PC上用windows库函数进行应用程序编程之后,支持TCP/IP通信协议,通过Ethernet接口将数据及程序装入各个机器人控制器中。
2)Fieldbus接口:支持多种流行的现场总线规格,如Devicenet、ABRemoteI/O、Interbus-s、profibus-DP、M-NET等。
机器人控制系统结构方式
集中控制系统
用一台计算机实现全部控制功能,结构简单,成本低,但实时性差,难以扩展,在早期的机器人中常采用这种结构,其构成框图,如图所示。
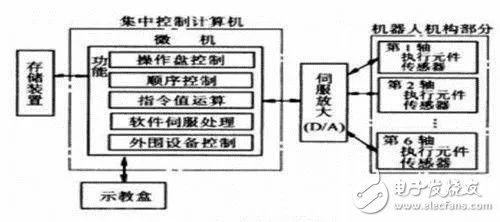
基于PC的集中控制系统里,充分利用了PC资源开放性的特点,可以实现很好的开放性:多种控制卡,传感器设备等都可以通过标准PCI插槽或通过标准串口、并口集成到控制系统中。
集中式控制系统的优点是:硬件成本较低,便于信息的采集和分析,易于实现系统的最优控制,整体性与协调性较好,基于PC的系统硬件扩展较为方便。
其缺点也显而易见:系统控制缺乏灵活性,控制危险容易集中,一旦出现故障,其影响面广,后果严重;由于机器人的实时性要求很高,当系统进行大量数据计算,会降低系统实时性,系统对多任务的响应能力也会与系统的实时性相冲突;此外,系统连线复杂,会降低系统的可靠性。
主从控制方式
采用主、从两级处理器实现系统的全部控制功能。主CPU实现管理、坐标变换、轨迹生成和系统自诊断等:从CPU实现所有关节的动作控制。其构成框图,如图所示。
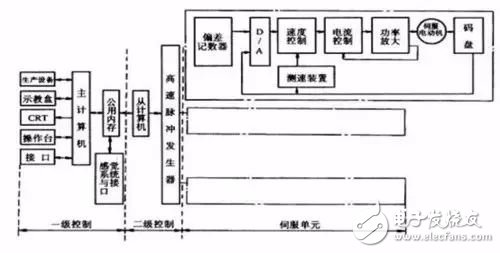
主从控制方式系统实时性较好,适于高精度、高速度控制,但其系统扩展性较差,维修困难。
分散控制方式
按系统的性质和方式将系统控制分成几个模块,每一个模块各有不同的控制任务和控制策略,各模式之间可以是主从关系,也可以是平等关系。这种方式实时性好,易于实现高速、高精度控制,易于扩展,可实现智能控制,是目前流行的方式,其控制框图如图所示。
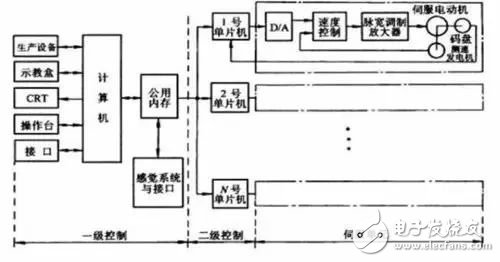
其主要思想是“分散控制,集中管理”,即系统对其总体目标和任务可以进行综合协调和分配,并通过子系统的协调工作来完成控制任务,整个系统在功能、逻辑和物理等方面都是分散的,所以又称为集散控制系统或分散控制系统。
这种结构中,子系统是由控制器和不同被控对象或设备构成的,各个子系统之间通过网络等相互通讯。分布式控制结构提供了一个开放、实时、精确的机器人控制系统。分布式系统中常采用两级控制方式。
两级分布式控制系统
通常由上位机、下为机和网络组成。上位机可以进行不同的轨迹规划和控制算法,下位机进行插补细分、控制优化等的研究和实现。上位机和下位机通过通讯总线相互协调工作,这里的通讯总线可以是RS-232、RS-485、EEE-488以及USB总线等形式。
现在,以太网和现场总线技术的发展为机器人提供了更快速、稳定、有效的通讯服务。尤其是现场总线,它应用于生产现场、在微机化测量控制设备之间实现双向多结点数字通信,从而形成了新型的网络集成式全分布控制系统—现场总线控制系统。
分布式控制系统的优点在于:系统灵活性好,控制系统的危险性降低,采用多处理器的分散控制,有利于系统功能的并行执行,提高系统的处理效率,缩短响应时间。
机器人控制系统分类
1、程序控制系统:给每一个自由度施加一定规律的控制作用,机器人就可实现要求的空间轨迹。
2、自适应控制系统:当外界条件变化时,为保证所要求的品质或为了随着经验的积累而自行改善控制品质,其过程是基于操作机的状态和伺服误差的观察,再调整非线性模型的参数,一直到误差消失为止。这种系统的结构和参数能随时间和条件自动改变。
3、人工智能系统:事先无法编制运动程序,而是要求在运动过程中根据所获得的周围状态信息,实时确定控制作用。
4、点位式控制系统:要求机器人准确控制末端执行器的位姿,而与路径无关。
5、连续轨迹控制系统:要求机器人按示教的轨迹和速度运动。
6、控制总线:国际标准总线控制系统。采用国际标准总线作为控制系统的控制总线,如VME、MULTI-bus、STD-bus、PC-bus。
7、自定义总线控制系统:由生产厂家自行定义使用的总线作为控制系统总线。
8、编程方式:物理设置编程系统。由操作者设置固定的限位开关,实现起动,停车的程序操作,只能用于简单的拾起和放置作业。
9、在线编程:通过人的示教来完成操作信息的记忆过程编程方式,包括直接示教模拟示教和示教盒示教。
10、离线编程:不对实际作业的机器人直接示教,而是脱离实际作业环境,示教程序,通过使用高级机器人,编程语言,远程式离线生成机器人的作业轨迹。
-
传感器
+关注
关注
2550文章
51035浏览量
753044 -
控制系统
+关注
关注
41文章
6604浏览量
110574 -
机器人
+关注
关注
211文章
28379浏览量
206906
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论