 如何在嵌入式FreeRTOS系统接口调用API?
如何在嵌入式FreeRTOS系统接口调用API?
1.在最近的嵌入式工作中很多都是学习FreeRTOS系统,由于只是会对RTOS的接口进行调用,但是很多时候都是知其然而不知其所以然,所以现在对API进行总结。
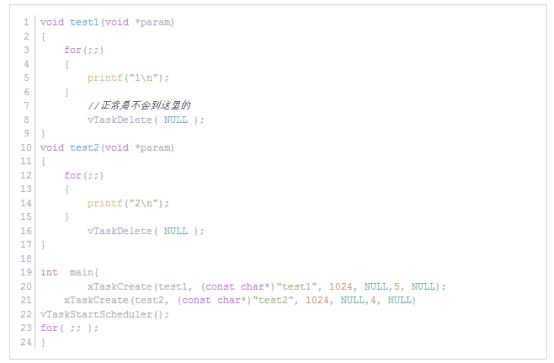
2.首先还是从main函数入口,main()函数创建任务,然后启动调度器
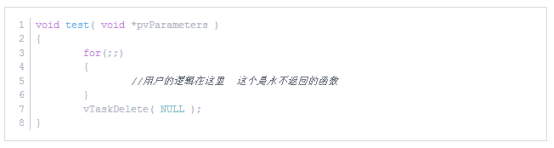
大概的格式如下:

3.在 FreeRTOS 中,多线程被称为多任务,在这里任务可以看得和线程相同。(其实并不相同)
首先创建任务的接口:
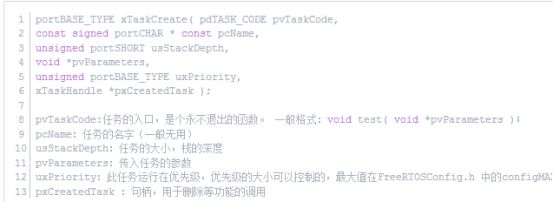
如:

调用的函数demo如下:
上面是对两个接口的简单介绍,下面是注意的事项。
(1):每个任务的执行必要要有延时,如果没有延时,那么会出现单个任务一直占用CPU的现象。比如说下面的代码逻辑就会出现一直在运行任务一的现象;

(2)由于多任务是使用的时间片轮转的方式调用,如果优先级高的任务占用的时间片过多,那么低优先级的任务会出现饿死状态。
(3)(3)时间片的长度通过心跳中断的频率进行设定,心跳中断频率由FreeRTOSConfig.h 中的编译时配置常量 configTICK_RATE_HZ 进行配置。比如说,如果 configTICK_RATE_HZ 设为 10(HZ),则时间片长度为 100ms
(4)优先级是在FreeRTOS是可以通过调用API进行修改的。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表德赢Vwin官网
网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
嵌入式
+关注
关注
5082文章
19104浏览量
304802 -
API
+关注
关注
2文章
1499浏览量
61962 -
FreeRTOS
+关注
关注
12文章
484浏览量
62139
原文标题:嵌入式FreeRTOS系统接口调用API总结
文章出处:【微信号:gh_c472c2199c88,微信公众号:嵌入式微处理器】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
在FreeRTOS中如何调用API
1.在最近的嵌入式工作中很多都是学习FreeRTOS系统,由于只是会对RTOS的接口进行调用,但是很多时候都是知其然而不知其所以然,所以现在
发表于 06-23 09:00

汽车电子嵌入式软件接口库设计
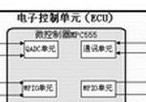
软件平台由微型系统内核和应用编程接口库组成。嵌入式操作系统内核负责任务调度及事件处理等,编程接口库负责将开发常用的算法和 MPC555 底层
发表于 01-23 17:32
•42次下载
Linux系统调用及用户编程接口API分析
在搭建起嵌入式开发环境之后,从本章开始,读者将真正开始学习嵌入式Linux的应用开发。由于嵌入式Linux是经Linux裁减而来的,它的系统调用
发表于 10-18 17:14
•2次下载
基于FreeRTOS的嵌入式实时操作系统的原理和实现
FreeRTOS是一个源码公开的免费的嵌入式实时操作系统,通过研究其内核可以更好地理解嵌入式操作系统的实现原理.本文主要阐述
发表于 11-18 03:34
•6669次阅读
基于RTSJ的实时嵌入式系统API的优化研究
描述了一个基于RTSJ的应用程序接口,该API的功能是提供高级的并发实时计算结构,优化实时嵌入式系统开发。同时,部署和优化(在开销足迹/时间要求方面)实时Java应用程序到一个指定的J
发表于 11-30 12:20
•426次阅读
嵌入式实时操作系统FreeRTOS在ARM7上移植实现
嵌入式实时操作系统FreeRTOS在ARM7上移植实现(嵌入式开发工程师待遇)-嵌入式实时操作系统
发表于 07-30 12:05
•21次下载

FreeRtos于嵌入式环境的应用
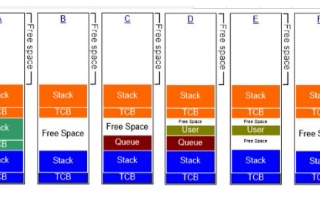
FreeRtos操作系统 首先,应该介绍什么是FreeRtos,他于单片机而言就是一个管理器,作为管理者管理嵌入式芯片中的任务,堆栈,中断,队列等等资源,对于操作





 工商网监
工商网监
评论