 分析高压电机及对控制系统设计
分析高压电机及对控制系统设计
在现代机器人设计中,头部、颈部、四肢的任何活动都需要各种各样电机的支持,如传统的旋转电机、步进电机、直线电机和其它特殊电机,但这些电机的驱动和控制要求各有不同,如何实现各种电机的精确控制解决方案?如何以最低的功耗实现对它们的控制?常常对设计师来说是一大挑战。本文将详细地讨论高压电机控制系统的各核心子系统在具体实现时应注意哪些问题。
高压交流(HVAC)电机、工业逆变器或高压永磁无刷电机是高电压系统的几个例子,它们典型地按他们的马力进行分类。虽然仍是最常见的,但其他类型电机也已经出现,如直线电机和内嵌各种激励器实现的齿轮头电机。数字电机控制解决方案允许精确地控制这些机械驱动机构的位置、速度和转矩。在这类大型机械驱动机构中的MOSFET通常容量超过600V。
例如,TI有栅极驱动解决方案TPS2829,一个同相高速MOSFET驱动器。当结合反馈环路中的TLV3501比较器时,这些系统中的栅极就可以进行数字控制。另外,TI的MOSFET驱动器(如UCC37321或UCC37323)可以直接驱动小马达或驱动功率器件,如MOSFET或IGBT。
高压电机控制系统的主要设计考虑因素
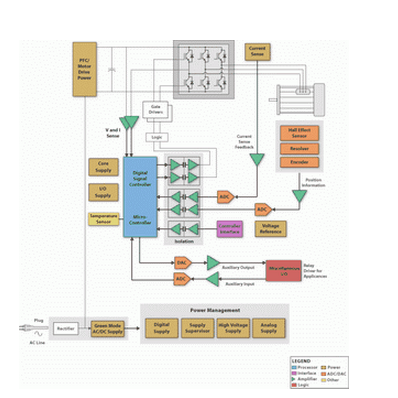
高压电机控制系统的核心子系统包括:控制器、隔离、控制器接口和运动反馈。
控制器:TI还提供一系列的控制处理器解决方案,从超低功耗MSP430微控制器到TMS470基于ARM7的处理器和C2000数字信号控制器(DSC)。恰当的控制器可以优化电机驱动效率,提高可靠性和降低整体系统成本。C2000控制器的32位DSP水平的性能和针对电机控制优化的片上外设使用户可以轻松地实现先进的算法,如三相马达的无传感器矢量控制。C2000系列控制器(从低成本F28016到业界首个浮点DSC TMS320F28335)都保持软件兼容。
隔离:TI的数字隔离器具有逻辑输入和输出缓冲器,它们采用二氧化硅进行隔离,提供4kV的隔离能力。与隔离电源结合使用时,这些器件可以阻隔高电压,隔离地,并防止噪声电流进入本地地,以及干扰或损坏敏感电路。
控制器接口:RS-232或RS-422对许多系统而言足够用了。RS-485信令可能会捆绑一些协议,如Profibus、Interbus、Modbus或BACnet,每个针对最终用户的特定需求。有时,控制器局域网(CAN)或EtherNet/IP(工业协议)优先用于满足联网要求。M-LVDS是可以提供更低功耗的一种替代选择。
使用外部电路的运动反馈:隔离的Delta-Sigma调制器(AMC1203/AMC1210)非常适合用于分流测量,以拉平毛刺和增加电流反馈分辨率。此外,INA19x(x=3到8)和INA20x(x=1至9)为低端和高端电流分流监测提供很宽的共模电压。
霍尔效应或磁传感器通常在测量超过10A的电流时更有效率,而且他们可固有地提供隔离能力。ADS1204、ADS1205和ADS1208是3个推荐器件。为了将±10V(20Vpp)信号连接到采用3.3V或5V电源的ADC上,可使用一个INA159电平差异放大器。像ADS7861/ADS7864或ADS8361/ADS8364的ADC可提供4通道或6声道的同时电流取样。
-
控制器
+关注
关注
112文章
16332浏览量
177795 -
高压电机
+关注
关注
0文章
73浏览量
11846 -
永磁无刷电机
+关注
关注
0文章
29浏览量
13982
发布评论请先 登录
相关推荐
创新国产PSM高压电源控制系统,推动核聚变科技新突破
电子束焊机用高压电源中的PLC控制系统的设计
高压电机控制系统的设计考量
对高压电机控制系统的分析与设计





 工商网监
工商网监
评论