 液压伺服系统工作原理
液压伺服系统工作原理
液压伺服系统.
液压伺服系统是使系统的输出量,如位移、速度或力等,能自动地、快速而准确地跟随输入量的变化而变化,与此同时,输出功率被大幅度地放大。
液压伺服控制是复杂的液压控制方式。液压伺服系统是一种闭环液压控制系统。
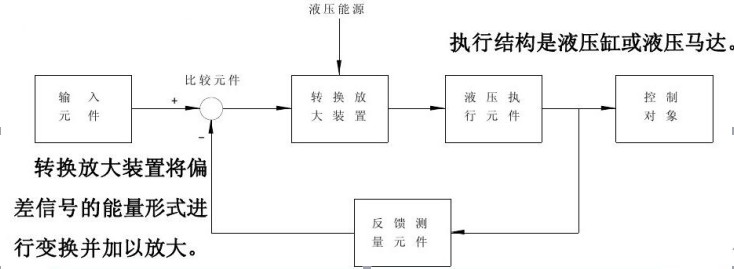
液压伺服系统结构
输入元件给出输入信号,加于系统的输入端。
反馈测量元件测量系统的输出量,并转换成反馈信号。输入元件和反馈测量元件都可以是机械的,电气的,液压的或其组合。
比较元件将反馈信号与输入信号进行比较,产生偏差信号加于放大装置,该元件一般不单独存在。
液压伺服系统原理图
下图示为一液压伺服系统原理图,Xi为阀芯位移(做为系统的输入量),Xp缸体位移(做为系统的输出量),系统中阀体和缸体作成一体,构成反馈连接。
系统中输出位移能够精确地复现输入位移的变化,同时它输入的机械量转换成很大的输出力,因此也是一个功率放大装置。
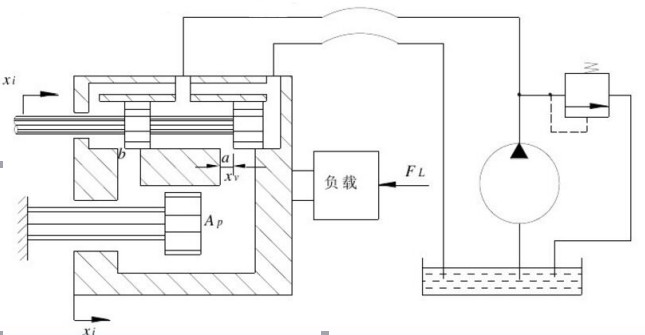
液压伺服系统工作原理.
如右所示是一个简单的液压伺服系统原理图。液压泵4是系统的能源,它以恒定的压力向系统供油,供油压力由溢流阀3调定。 四通滑阀1是一个转换放大元件(伺服阀),把输入的机械信号(位移或速度)转换成液压信号(流量或压力) 并放大输出至液压缸3。 液压缸作为执行元件,输入压力油的流量,输出运动速度(或位移),从而带动负载移动。 四通滑阀和液压缸制成一个整体,构成了反馈连接。

当滑阀处于中间位置时,阀的四个窗口均关闭,阀没有流量输出,液压缸2不动,系统处于静止状态。给滑阀一个向右的输入位移Xi,则窗口a 、b便有一个相应的开口量 Xv=Xi ,液压油经窗口a进入液压缸右腔,左腔油液经窗口b排出,缸体右移Xp,由于缸体和阀体是一体的,因此阀体也右移Xp。因滑阀受输入端制约,则阀的开口量减小,直到Xp=Xi,即Xv=0,阀的输出流量等于零,缸体才停止运动,处于一个新的平衡位置上,从而完成了液压缸输出位移对滑阀输入位移的跟随运动 。如果滑阀反向运动,液压缸也反向跟随运动。
在该系统中,输出位移Xp之所以能够精确地复现输入位移 Xi 的变化,是因为缸体和阀体是一个整体,构成了闭环控制系统.在控制过程中,液压缸的输出位移能够连接不断地回输到阀体上,与滑阀的输入位移相比较,得出两者之间的位置偏差,即滑阀的开口量。因此,压力油就要进入并驱动液压缸运动,使阀的开口量(偏差)减小,直至输出位移与输入位移相一致时为止。液压伺服系统的工作原理用如图所示的方块图来表示:
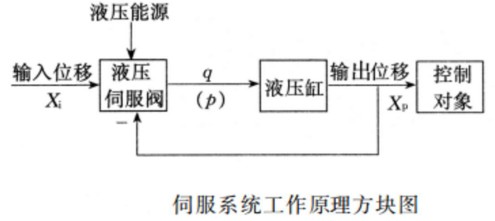
液压伺服系统的基本工作原理就是利用液压流体动力的闭环控制 ,即利用反馈连接得到偏差信号 ,再利用偏差信号去控制液压能源输入到系统的能量,使系统向着减小偏差的方向变化,从而使系统的实际输出与希望值相符。
-
液压
+关注
关注
3文章
208浏览量
20727 -
伺服
+关注
关注
16文章
650浏览量
40951
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论