 采用机器视觉技术实现导览机器人控制系统总方案及软硬件设计
采用机器视觉技术实现导览机器人控制系统总方案及软硬件设计
1 引言
在研究机器视觉的移动机器人导航技术的基础上,基于层次结构,简单介绍导览机器人控制系统的总体方案及软硬件设计。采用图像处理中的边缘检测和模板匹配方式进行机器人的视觉导航,使机器人在结构化道路环境下能够自动躲避障碍物,停靠到目标点,并能向参访者导览解说,最后验证了该系统的有效性和优越性。
2 导览机器人简介
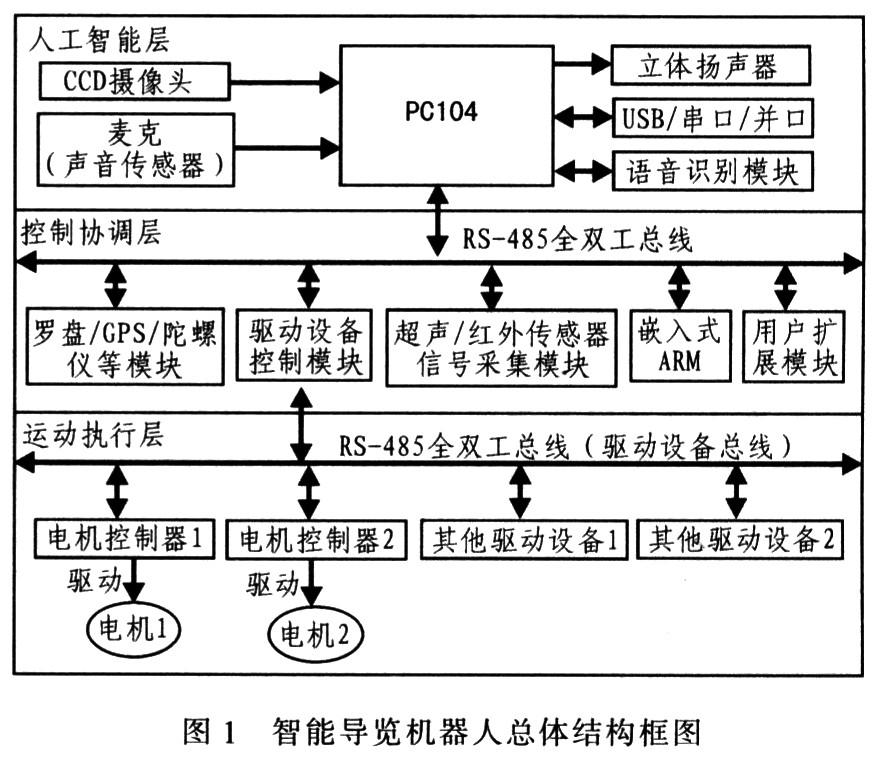
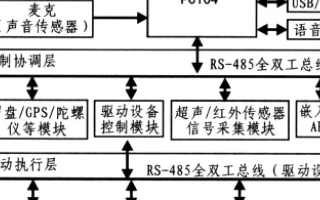
导览机器人用在大型展览馆、博物馆或其他会展中心,引导参访者沿着固定路线参访,向参访者解说以及进行简单对话。因此导览机器人必须具有自主导航、路径规划、智能避障、目标点的停靠与定位、语音解说以及能与参访者进行简单对话等功能,并具有对外界环境快速反应和自适应能力。基于层次结构,导览机器人可分为:人工智能层、控制协调层和运动执行层。其中人工智能层主要利用CCD摄像头规划和自主导航机器人的路径,控制层协调完成多传感信息的融合,而运动执行层完成机器人行走。图1为智能导览机器人的总体结构框图。
3 导览机器人硬件设计
3.1 人工智能层硬件实现
考虑到移动机器人控制系统要求处理速度快、方便外围设备扩展、体积和质量小等要求,因此上位机选用PC104系统,其软件用C语言编程。采用USB摄像头,采集机器人前方的视觉信息,为机器人视觉导航,路径规划提供依据。外设麦克和扬声器,当机器人到达目标点后,进行导览解说。
3.1.1 控制协调层的硬件实现
机器人传感器的选取应取决于机器人的工作需要和应用特点。这里选用超声波传感器、红外传感器、电子罗盘及陀螺仪,采集机器人周围环境信息,为机器人避障、路径规划提供帮助。利用ARM处理平台,通过RS-485总线驱动电机,驱动机器人行走。
导览机器人要求传感器精度稍高,重复性好,抗干扰能力强,稳定性和可靠性高。机器人在行进过程中必须能够准确获得其位置信息,数字罗盘可靠输出航向角,陀螺仪测量偏移并进行必要修正,以保证机器人行走的方向不偏离。采用超声波传感器和红外传感器相结合的方法获取前方障碍物信息。该系统设计选用6个超声波传感器和6个红外传感器。其中,正前方和正后方各1个,其余4个超声波传感器分别位于正前方和正后方的两边,夹角为45°,红外传感器分别安装在超声波传感器的正上方1~2 cm处。超声波传感器主要通过测距实现避障,而红外传感器主要是用于补偿超声波传感器的盲区,判断近距离是否有障碍物。
3.1.2 运动执行层的硬件实现
该智能导览机器人的执行机构采用直流伺服电机。这里选用三洋电机Super_L (24 V/3.7 A)额定输出功率为60 W,最大空载转速为3 000 r/rain,并带500线的光学码盘,使机器人完成相应动作。导览机器人采用闭环控制,通过光学码盘测量车轮速度的实际值并反馈给微控制器。基于实际转速与给定转速的差值,驱动器按一定的计算方法调整相应电压,如此反复,直到达到给定转速。机器人调速采用FAULHABER公司的 MCDC2805实现。它能实现速度同步性能,同时转矩波动最小,内置PI调节器能准确到达指定位置。当配备Super_L电机及集成编码器时,即使在转速非常低的情况下,也能达到0.180的定位控制精度。
3.2 导览机器人软件设计
通过USB摄像头或其他摄像头采集导览机器人前方的视觉信息,通过图像处理算法处理视频,使机器人能够进行路径规划和自主导航。通过接收下层的多传感融合信息,能够实现近距离的避障,遇到障碍物时进行自动报警。到达目标点后,能够语音解说,解说完后能与参访者进行简单对话。
4 视觉导航
视觉导航机器人的整个系统由两部分构成:添加了无线通信模块和无线摄像头的能力风暴机器人和远程计算机。这两部分之间的通信由无线通信模块完成。机器人包括能力风暴机器人、无线摄像头和无线通信模块三个部分。在机器人工作时,无线摄像头将采集到的视频信号传送给无线视频接收器,无线视频接收器再通过视频采集卡(Osprey210)将待处理的视频信号传送给计算机,计算机经过处理后,做出相应的决策,并将决策信号通过无线通信模块发送给机器人,这样就建立了一个简单的闭环控制系统。无线通信模块由两个完全相同的无线串口通信模块组成,工作在全双工状态。在机器人中无线通信模块与机器人的串口控制器连接,在计算机中无线通信模块与计算机的COM口相连。
4.1 图像预处理
原始图像为Logiteeh摄像头采集的一幅室内用蓝色标签制作的结构化道路图片,像素大小为320x240,首先将原始图像进行灰度变换,并通过选取合适的阈值进行二值化处理。然后提取罔像有用信息,通过形态学的膨胀腐蚀等操作提取前进方向。如图2所示。
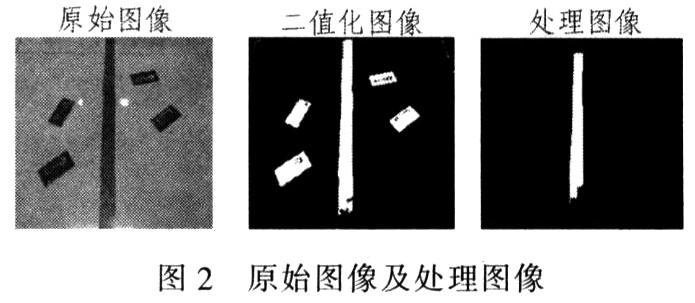
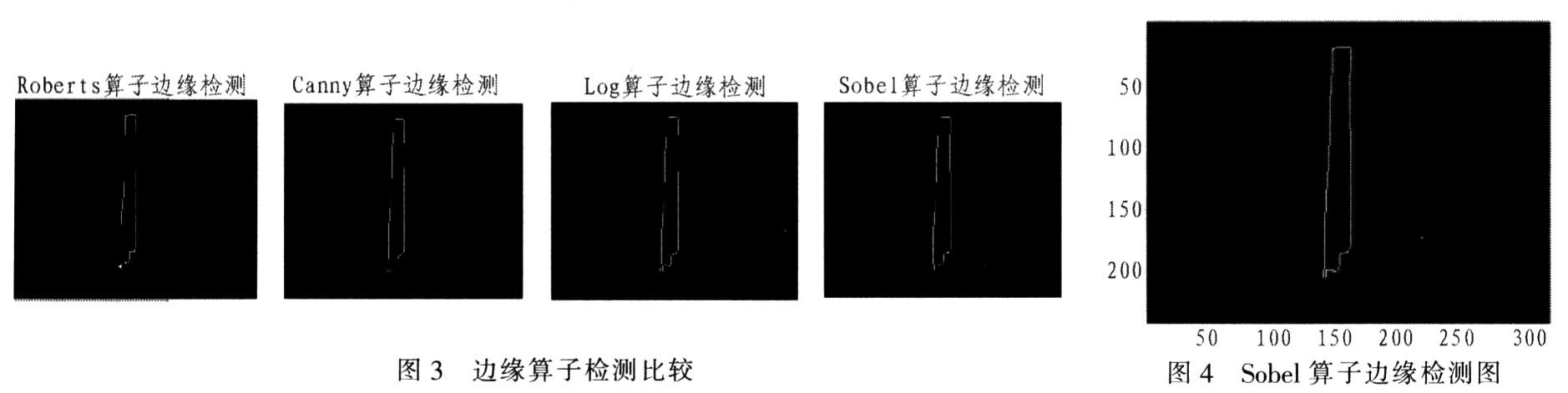
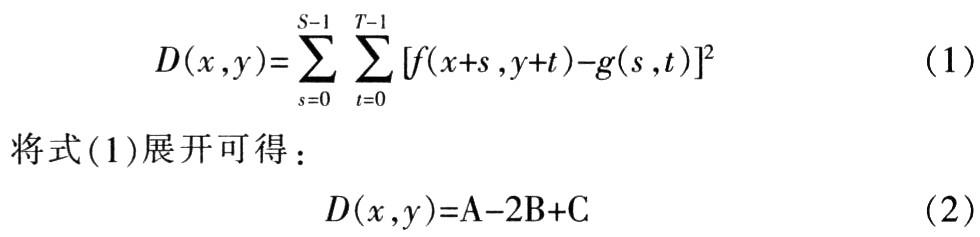
图3为常见的边缘算子检测效果比较。从图3中可看出Canny和Sobel算子检测效果相对好些,其中Sobel算子对噪声具有平滑作用,能提供较为精确的边缘方向信息。这里采用Sobel算子进行检测,如图4所示。
根据图4,系统通过hough变换检测两条直线的位置,测出图像的两条边缘线离两端的像素大小,再根据实际地面距离进行标定,便可获知机器人所在位置。
4.2 模板匹配算法
模板匹配技术是图像目标识别技术中一个重要的研究方向,具有算法简单、计算量小以及识别率高等特点,目前在目标识别领域得到广泛应用。它是用一个较小的图像,将模板与源图像相比较,确定在源图像中是否存在与该模板相同或相似的区域,若该区域存在,可确定其位置并提取该区域。它常采用模板与源图像对应区域的误差平方和作为测度。
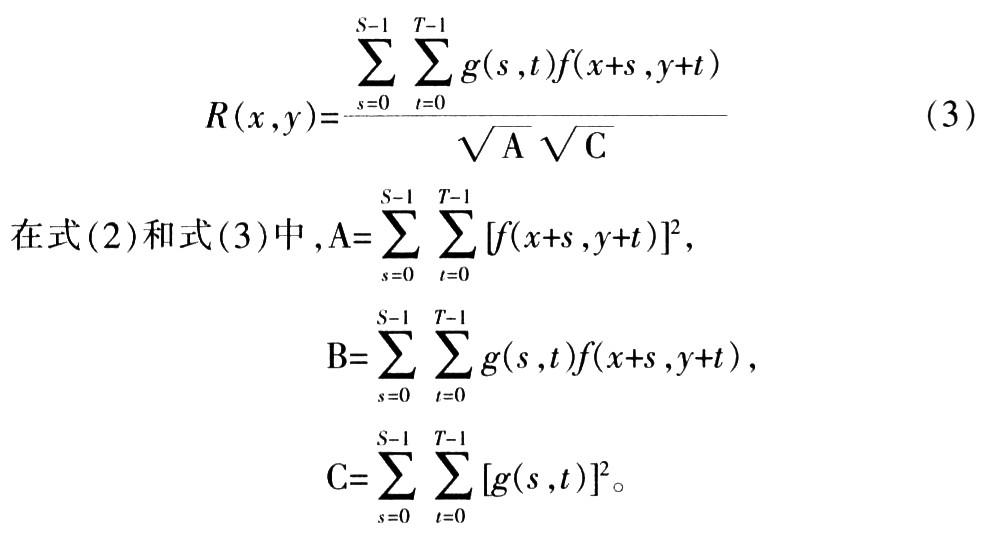
设f(x,y)为MxN的源图像,g(s,t)为SxT(s≤M,T≤N)的模板图像,则误差平方和测度定义为:
当A为常数时,则可用2B相匹配,当D(x,y)取得最大值时,便认为模板与图像相匹配。通常假设A为常数时会产生误差。严重时将无法正确匹配,因此可用归一化互相关作为误差平方和测度,定义为:
4.3 模板匹配改进算法
但是按模板匹配算法求匹配计算工作量非常大,考虑到相关是卷积的一种特定形式以及 Matlab计算功能的强大,采用FFT方法,在频域中计算后再进行逆变换即可求出。图像和定位模板图像旋转180°的傅里叶变换后作点乘运算,再求其逆 FFT变换并返回空间域值也就相当于相关运算。在求取空间域值的最大值后,再根据最大值选取合适的阈值,便可确定目标点的位置。实验中在模板匹配成功后,可将目标和背景颜色二值化,并用红色“十”字符号标记,不断更新数据信息。将停靠点设定在自己期望的像素位置,然后自动调整机器人位置,设计成如图5形式,可知机器人需要向右行驶。
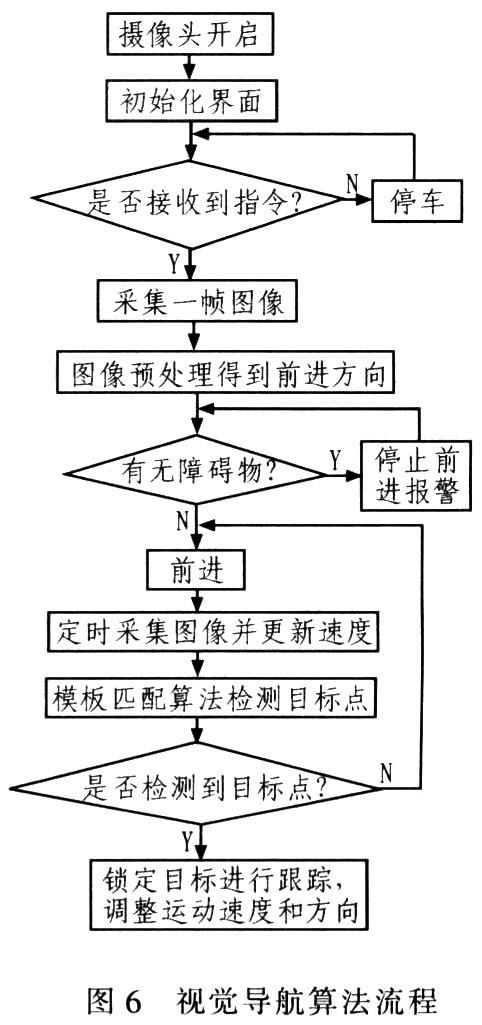
图6为视觉导航算法流程。
5 实验结果与结论
本文所介绍的设计为简易机器人(能力风暴机器人)添加了视觉模块和无线通信模块,并研究了相关算法和策略,实现了自主路径跟踪。为了使系统真正做到稳定快速,在图像预处理、路径识别和路径跟踪等各个环节都充分考虑到算法的实时性与鲁棒性。
-
控制系统
+关注
关注
41文章
6604浏览量
110574 -
机器人
+关注
关注
211文章
28379浏览量
206906 -
机器视觉
+关注
关注
161文章
4369浏览量
120276 -
人工智能
+关注
关注
1791文章
47183浏览量
238200
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论