 PLC控制V90PN的详细方法
PLC控制V90PN的详细方法
概述
S7-1500 可以通过 PROFINET 通讯连接SINMICS V90 伺服驱动器,将V90 驱动器的控制模式设置为“基本位置控制(EPOS)”,PLC 通过 111 报文及 TIA Portal 提供的驱动库中的功能块 FB284 可实现 V90 的 EPOS 基本定位控制,控制系统连接如图1-1 所示。
图 1-1 控制系统图
PLC 通过库中的驱动功能块的调用原理如图 1- 2 所示:
图 1 - 2驱动功能块调用原理
1>
循环数据交换– SINA_POS (FB284), SINA_SPEED (FB285)
此功能块实现 PLC 与 SINAMICS 驱动器的命令及状态周期性通讯,如电机的运行命令、位置及速度设定点等或接收驱动器的状态及速度实际值等。
2>
非周期性通讯的参数获取– SINA_PARA (FB286):
此功能块实现 PLC 读取 SINAMICS 驱动器的参数访问,如读取或写入数据块参数等。
安装 StartDrive 软件后,在博途软件中会自动安装驱动库文件,软件下载链接:
https://support.industry.siemens.com/cs/us/en/view/68034568
SINA_POS(FB284)功能块管脚介绍
S7-1200 控制 V90PN 实现 EPOS 基本定位控制的功能块 FB284 在命令库中的位置如图2-1 所示:
图 2-1 功能块FB284
功能块可在下述 OB 中进行调用:
循环任务:OB1
循环中断 OB:如 OB32
此功能块可循环激活 SINAMICS 驱动中的基本定位工艺功能,需注意在驱动侧必须使用西门子标准报文 111。
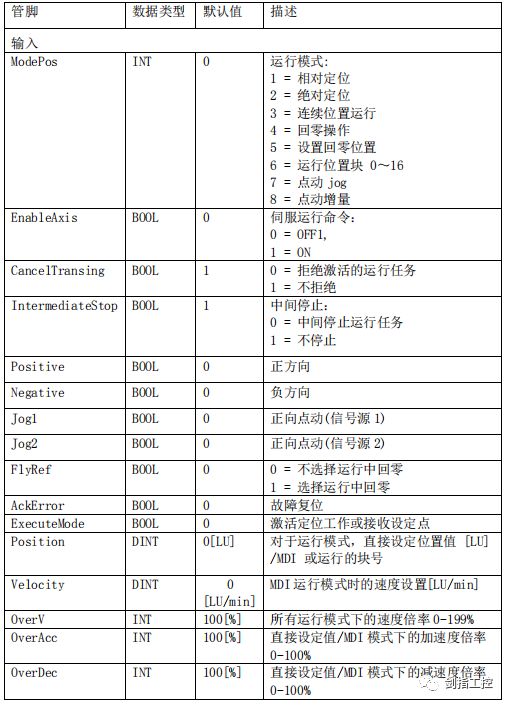
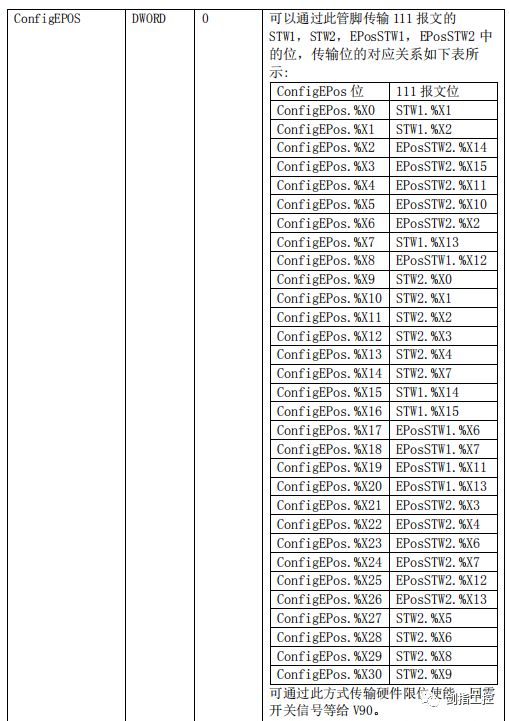
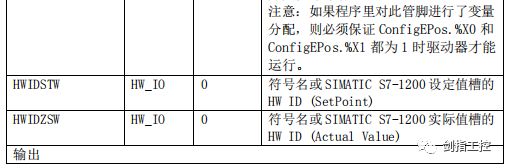
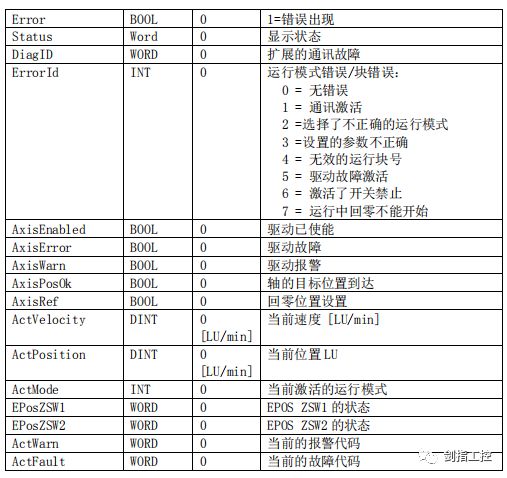
FB284 功能块管脚解释见表 2-1:
SINA_POS 功能块的功能实现
3.1 概述
V90 PN 的基本定位(EPOS)是一个非常重要的功能,用于驱动的位置控制。它可用于直线轴或旋转轴的绝对及相对定位,博途软件库文件中的“SINA_POS”功能模块可用于SINAMICS S/G/V 系统驱动器的基本定位控制。
此外,需要在 V90 的V-Assist 软件中将控制模式设置为“基本定位(EPOS)”模式,激活基本定位器,并选择西门子标准 111 报文。
闭环位置控制器包含下述部分:
实际位置值准备(包括测量输入评价及寻找参考点)
位置控制器 (包括限制、适配、预控制计算)
监控 (静止,定位及动态跟踪误差监控)
基本位置控制器还可实现下述功能:
机械系统:
齿轮间隙补偿
模态轴
位置跟踪/限制
速度/加速度/延迟限制
软件限位开关
硬件限位开关
位置/静止监控
动态跟踪误差监控
主要运行模式有Jog、Homing、MDI、程序块几种,关于 SINAMICS SV90 的基本定位功能的详细描述请参考V90 PN 的操作手册。
3.2 SINA_POS(FB284)运行模式
3.2.1运行条件
1>轴通过输入管脚EnableAxis = 1,OFF2 及OFF3 内部已置 1。如果轴已准备好并驱动无故障(AxisErr= "0") ,EnableAxis 置 1 后轴使能,输出管脚AxisEnabled 信号变为 1。
2>ModePos 输入管脚用于运行模式的选择。可在不同的运行模式下进行切换,如: 连续运行模式(ModePos=3) 在运行中可以切换到绝对定位模式(ModePos=2)。
3>输入信号CancelTransing,IntermediateStop 对于除了点动之外的所有运行模式均有效,在运行EPOS 时必须将其设置为 "1,设置说明如下:
设置CancelTransing,轴按最大减速度停止,丢弃工作数据,轴停止后可进行运行模式的切换。
设置IntermediateStop=0,使用当前应用的减速度值进行斜坡停车,不丢弃工作数据,如果重新再设置IntermediateStop=1 后轴会继续运行,可理为轴的暂停。可以在轴静止后进行运行模式的切换。
在任何运行模式下都可以通过FlyRef 输入来选择运行中回零的功能。
4>激活硬件限位开关:
如果使用了硬件限位开关,需要将FB284 功能块的输入管脚
ConfigEPos.%X3(POS_STW2.15 )置 1,激活V90 PN 的硬件限位功能。
正、负向的硬件限位开关可连接到V90 PN 驱动器的定义为WCL、
CCWL 的 DI 点( DI1 至DI4 )
5>激活软件限位开关
如果使用了软件限位开关,需要将FB284 功能块的输入管脚
ConfigEPos.%X2(POS_STW2.14 )置 1,激活V90 PN 的软件限位功能
(P2582)。
在 V90 PN 中设置 p2580(负向软限位位置)、p2581(正向软限位位置)
3.2.2绝对定位运行模式
“绝对定位”运行模式可通过驱动功能“MDI 绝对定位”来实现,它采用SINAMICS 驱动的内部位置控制器来实现绝对位置控制。
要求:
运行模式选择ModePos=2
轴使能EnableAxis =1
轴必须已回零或编码器已被校正
如果切换模式大于 3,轴必须为静止状态,在任意时刻可以在 MDI 运行模式内进行切换(ModePos=1,2,3)
步骤:
通过输入参数Position, Velocity,指定目标位置及动态响应参数
通过输入参数OverV、OverAcc、OverDec 指定速度、加减速度的倍率
运行条件"CancelTransing" 及"IntermediateStop"必须设置为 "1",Jog1 及Jog2 必须设置为 "0"
在绝对定位中,运行方向可以按照最短路径运行至目标位置,此时输入参数Positive 及 Negative 必须为 "0"
通过ExecuteMode 的上升沿触发定位运动,激活命令的当前状态或通过
EPosZSW1、EPosZSW2 进行监控,当目标位置到达后通过AxisPosOk 置 1 ,当定位过程中出现错误,则输出参数Error 置 1。
注意:
当前正在运行的命令可以通过ExecuteMode 上升沿被新命令替换,但仅用于运行模式ModePos1,2,3。
控制时序示例如图 3-1 所示。
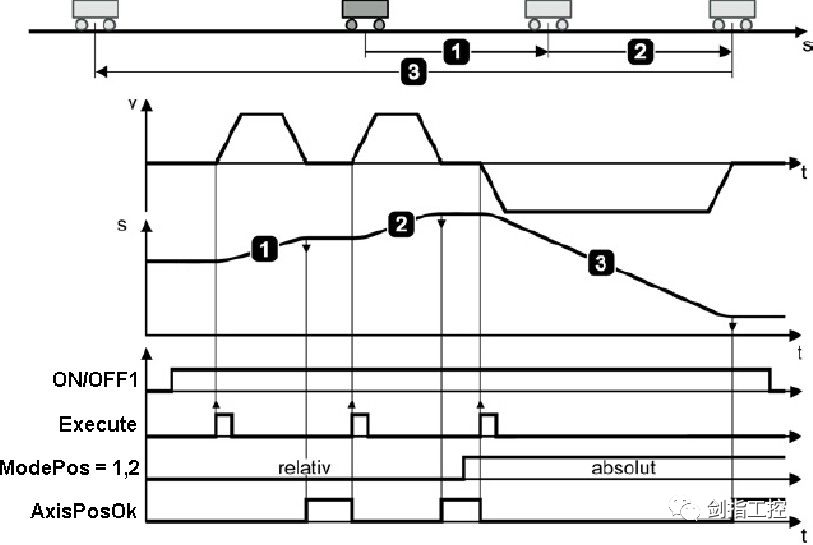
图 3-1 绝对定位模式控制时序
3.2.3相对定位运行模式
“相对定位”运行模式可通过驱动功能“MDI 相对定位”来实现,它采用SINAMICS 驱动的内部位置控制器来实现相对位置控制。
要求:
运行模式选择ModePos=1
驱动的运行命令EnableAxis=1
轴必须不必回零或编码器未被校正
如果切换模式大于 3,轴必须为静止状态,在任意时刻可以在 MDI 运行模式内进行切换(ModePos=1,2,3)
步骤:
通过输入参数Position, Velocity 指定目标位置及动态响应参数
通过输入参数OverV、OverAcc、OverDec 指定速度、加减速度的倍率
运行条件"CancelTransing" 及"IntermediateStop"必须设置为 "1",Jog1 及Jog2 必须设置为 "0"
在相对定位中,运行方向由Positive 及Negative 决定
通过ExecuteMode 的上升沿触发定位运动,激活命令的当前状态或通过EPosZSW1、EPosZSW2 进行监控,当目标位置到达后通过AxisPosOk 置 1 ,当定位过程中出现错误,则输出参数Error 置 1。
注意:
当前正在运行的命令可以通过ExecuteMode 上升沿被新命令替换,但仅用于运行模式ModePos 1,2,3。
控制时序示例如图 3-2 所示。
图 3-2 相对定位模式控制时序
3.2.4连续运行模式(Setup mode)
"连续运行"模式允许轴的位置控制器在正向或反向以一个恒定的速度运行,此为驱动的"MDI setup"运行模式。
要求:
运行模式选择ModePos=3
驱动的运行命令AxisEnable=1
轴不必回零或编码器未被校正
如果切换模式大于 3,轴必须为静止状态,在任意时刻可以在 MDI 运行模式内进行切换(ModePos=1,2,3)
步骤:
通过输入参数Velocity 指定运行速度
通过输入参数OverV、OverAcc、OverDec 指定速度、加减速度的倍率
运行条件"CancelTransing" 及"IntermediateStop"必须设置为 "1",Jog1 及Jog2 必须设置为 "0"
运行方向由Positive 及Negative 决定
通过ExecuteMode 的上升沿触发定位运动,激活命令的当前状态或通过
EPosZSW1、EPosZSW2 进行监控,通过当目标位置到达后通过AxisPosOk 置 1 , 当定位过程中出现错误,则输出参数Error 置 1。
注意:
当前正在运行的命令可以通过ExecuteMode 上升沿被新命令替换,但仅用于运行模式ModePos 1,2,3。
控制时序示例如图 3-3 所示。
图 3-3 连续运行模式控制时序
3.2.5回零
此功能允许轴按照预设的回零速度及方式沿着正向或反向进行回零操作, 激活驱动的主动回零。
要求:
运行模式选择ModePos=4
驱动的运行命令EnableAxis=1
回零开关的状态由 FB284 功能块的输入管脚ConfigEPos.%X6(POS_STW2.2 )传递给V90 PN
轴静止
步骤:
通过输入参数OverV、OverAcc、OverDec 指定速度、加减速度的倍率
运行条件"CancelTransing" 及"IntermediateStop"必须设置为 "1",Jog1 及Jog2 必须设置为 "0"
运行方向由Positive 及Negative 决定
通过ExecuteMode 的上升沿触发回零运动,激活命令的当前状态或通过
EPosZSW1、EPosZSW2 进行监控,通过CancelTransing 信号来终止运动,回零完成后AxisRef 置 1 ,当运行过程中出现错误,则输出参数Error 置 1。
控制时序示例如图 3-4 所示:
图 3-4 回零控制时序
3.2.6设置零点位置
此运行模式允许轴在任意位置时对轴进行零点位置设置。
要求:
运行模式选择ModePos=5
轴处于闭环控制,而且为静止状态步骤:
轴静止时通过Execute 的上升沿设置轴的零点位置
注意:
零点位置可使用参数 P2599 进行设置。
控制时序示例如图 3-5 所示:
图 3-5 设置回零控制时序
3.2.7运行程序块
此程序块运行模式通过驱动功能"Traversing blocks"来实现,它允许自动创建程序块、运行至档块、设置及复位输出。
要求:
运行模式选择ModePos=6
驱动的运行命令AxisEnable=1
轴静止
轴必须已回零或绝对值编码器已校正
步骤:
工作模式、目标位置及动态响应已在V90 PN 驱动的运行块参数中进行设置,速度的OverV 参数对于程序块中的速度设定值进行倍率缩放
运行条件"CancelTransing" 及 "IntermediateStop"必须设置为 "1",Jog1 及Jog2 必须设置为 "0"
程序块号在输入参数 "Position" 中设置,取值应为 0~ 16
运动的方向由与工作模式及程序块中的设置决定,与 Positive 及Negative参数无关,必须将它们设置为“0”。
选择程序块号后通过Execute Mode 的上升沿来触发运行,激活命令的当前状态或通过EPosZSW1、EPosZSW2 进行监控,功能块处理命令过程中Busy 为 1, 当到达目标位置Done 置 1 ,当运行过程中出现错误,则输出参数Error 置 1。控制时序示例如图 3-6 所示。
图 3-6 运行程序块控制时序
注意:
在运行过程中,当前的运行命令可以被一个新命令通过“ExecuteMode”进行替代,但仅限于相同的运行模式下。
3.2.8点动(Jog)
点动运行模式通过驱动的"Jog"功能来实现。
要求:
运行模式选择ModePos=7
驱动的运行命令AxisEnable=1
轴静止
轴不必回零或绝对值编码器校正
步骤:
点动速度在V90 PN 中设置,速度的OverV 参数对于点动速度设定值进行倍率缩放
运行条件"CancelTransing" 及 "IntermediateStop"与点动运行模式无关,默认设置为"1"
注意:
Jog1 及Jog2 用于控制EPOS 的点动运行,运动方向由V90 PN 驱动中设置的点动速度来决定,默认设置为Jog1 = 负向点动速度,Jog2 = 正向点动速度 ,与Positive 及Negative 参数无关,默认设置为“0”。
激活命令的当前状态或通过EPosZSW1、EPosZSW2 进行监控,功能块处理命令过程中Busy 为 1,点动结束时(Jog1 or Jog2 = 0) 轴静止时"AxisPosOK" 置 1 ,当运行过程中出现错误,则输出参数Error 置 1。
控制时序示例如图 3-7 所示。
图 3-7 点动控制时序
3.2.9点动增量(Jog)
点动增量运行模式通过驱动的"Jog"功能来实现。
要求:
运行模式选择 ModePos=8
驱动的运行命令 AxisEnable=1
轴静止
轴不必回零或绝对值编码器校正
步骤:
点动速度在V90 PN 中设置,速度的OverV 参数对于点动速度设定值进行倍率缩放。
运行条件"CancelTransing" 及"IntermediateStop"与点动运行模式无关,默认设置为 "1"
注意:
Jog1 及 Jog2 用于控制 EPOS 的点动运行,运动方向由 V90 PN 驱动中设置的点动速度来决定,默认设置为 Jog1 traversing distance, Jog2 traversing distance =1000LU,与 Positive 及 Negative 参数无关, 默认设置为“0”。
激活命令的当前状态或通过EPosZSW1、EPosZSW2 进行监控,功能块处理命令过程中 Busy 为 1,点动结束时(Jog1 or Jog2 = 0) 轴静止时"AxisPosOK"置 1 ,当运行过程中出现错误,则输出参数 Error 置 1。
控制时序示例如图 3-8 所示。
图 3-8 增量点动控制时序
3.2.10基于 ModePos 值的运行模式切换说明
图 3-9 显示了基于 ModePos 值的可能的运行模式转换:
图 3-9 基于ModePos 值的运行模式转换
项目配置
4.1使用的软、硬件
使用的软件:
1>TIA Portal V14
2>V-Assistant V1.05
使用的硬件:
1>CPU 1515-2PN V2.0:订货号 6ES7 515-2> AM01-0AB0
2>V90 PN 控制器:订货号 6SL3210-5FB10-1UF0
3>1FL6 电机:订货号 1FL6024-2AF21-1AA1(增量编码器)
注意:
使用 V90 的 EPOS 功能,需要在 Portal V14 中安装 SINAMICS V90 PROFINET GSD 文件 , 下 载 链 接 如 下 : https://support.industry.siemens.com/cs/us/en/view/109737269
4.2 S7-1500 项目配置步骤
项目配置步骤如下:
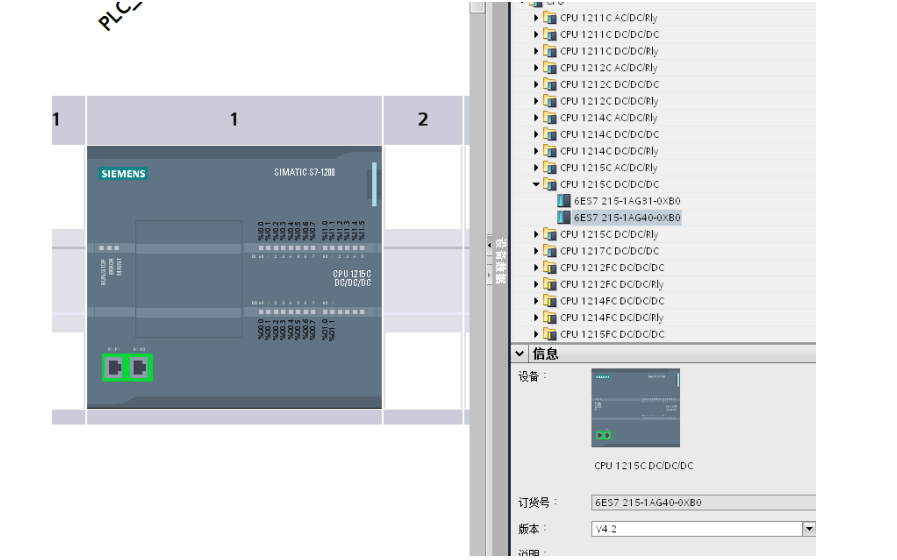
1>创建 S7-1500 新项目:
2>添加 S7-1500 PLC 设备:
3>安装 V90 PN 的 GSD 文件:
4>在网络视图中添加 V90 PN 设备并创建与 PLC 的网络连接。
V90 PN 的 GSD 文件在硬件目录中的路径如下:
注意:需选择正确的 GSD 版本,如图中所示。
5>分别设置 S7-1500 及 V90 PN 的 IP 地址及 Profinet 设备名称:
6>在 V90PN 的设备视图中插入西门子报文 111:
7>编译项目正确后,下载 S7-1500 的项目配置。
8>在 OB1 中将指令库中下述路径中的“SINA_POS(FB284)”功能块拖曳到
编程网络中:
9>为功能块各管脚添加变量:
注意:
对功能块管脚 HWI DSTW 及 HWI DSZW 的赋值可以通过点击管脚,
在下拉菜单中选择对应的 111 报文选项。
也可以参看下图,直接输入对应的硬件标识符:
10>将变量表中的相关变量添加到 Watch table 中,并通过 Watch table 进
行控制测试。
4.3 V90 PN 项目配置步骤
项目配置步骤如下:
1>设置控制模式为“基本位置控制(EPOS)”:
2>配置通信报文为西门子报文 111:
3>点击“设置 PROFINET->配置网络”,设置 V90 的 IP 地址及设备名称:
注意:
设置的设备名称一定要与 S7-1500 项目中配置的相同。参数保存后需重启驱动器才能生效。
-
驱动器
+关注
关注
52文章
8226浏览量
146245 -
plc
+关注
关注
5010文章
13271浏览量
463024 -
管脚
+关注
关注
1文章
226浏览量
32025
原文标题:PLC如何控制V90PN
文章出处:【微信号:gongkongworld,微信公众号:工控资料窝】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
1200控制V90PN,极限开关接到伺服上,那PLC这边还需要组吗?

1500PLC通过将FB284封装成一个标准FB块控制V90PN伺服EPOS定位
通过PROFINET连接V90PN实现位置闭环控制

基于S7-200实现V90速度控制设计应用

SINAMICS V90的转矩控制
S7-200 Smart如何通过Modbus通信实现对V90的速度控制
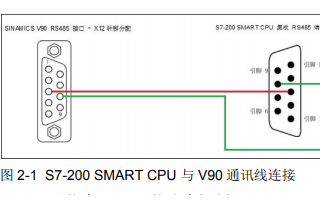
SMART如何与V90伺服实现内部位置控制

工控系统中PLC如何读取V90PN的各项参数
西门子S7-1200如何通过PROFINET通讯实现V90PN伺服控制
通过PROFINET通信实现V90 PN基本定位控制

西门子V90 PN通讯编程手册
西门子V90PN在EPOS模式下的回零操作方法介绍






 工商网监
工商网监
评论