 一文读懂倾角传感器原理及其应用
一文读懂倾角传感器原理及其应用
随着生产和科学的不断发展,角度测量越来越广泛的应用于工业科研等各领域,随着技术水平和测量准确度也在不断提高。 市场对于传感器的需求也是越来越大,单从定义上来看倾角传感器是用来测量相对于水平面的倾角变化量,换句话说倾角传感器其实是运用惯性原理的一种 加速度传感器 。
根据基本的物理原理,在一个系统内部,速度是无法测量的,但却可以测量其加速度。如果初速度已知,就可以通过积分算出线速度,进而可以计算出直线位移,所以它其实是运用惯性原理的一种加速度传感器。
当倾角传感器静止时也就是侧面和垂直方向没有加速度作用,那么作用在它上面的只有重力加速度。重力垂直轴与加速度传感器灵敏轴之间的夹角就是倾斜角了。
倾角传感器经常用于系统的水平距离和物体的高度的测量,从工作原理上可分为固体摆式、液体摆式、气体摆式三种倾角传感器,这三种倾角传感器都是利用地球万有引力的作用,将传感器敏感器件对大地的姿态角,即与大地引力的夹角 (倾角)这一物理量,转换成vwin 信号或脉冲信号。
固体摆式倾角传感器
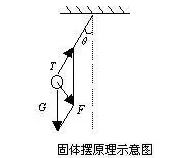
如图所示,其由摆锤、摆线、支架组成,摆锤受重力G和摆拉力T的作用,其合外力
F =G sinθ=mg sinθ
式中的θ为摆线与垂直方向的夹角。在小角度范围内测量时,可以认为F与θ成线性关系。如应变式倾角传感器就是基于此原理。
液体摆式倾角传感器
液体摆的结构原理是在玻璃壳体内装有导电液,并有三根铂电极和外部相连接,三根电极相互平行且间距相等,如图所示。
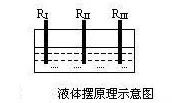
当壳体水平时,电极插入导电液的深度相同。如果在两根电极之间加上幅值相等的交流电压时,电极之间会形成离子电流,两根电极之间的液体相当于两个电阻RI和RIII。
若液体摆水平时,则RI=RIII。
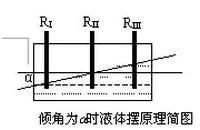
当玻璃壳体倾斜时,电极间的导电液不相等,三根电极浸入液体的深度也发生变化,但中间电极浸入深度基本保持不变。如图所示,左边电极浸入深度小,则导电液减少,导电的离子数减少,电阻RI增大,相对极则导电液增加,导电的离子数增加,而使电阻RIII 减少,即RI>RIII。反之,若倾斜方向相反,则RI<RIII。
在液体摆的应用中也有根据液体位置变化引起应变片的变化,从而引起输出电信号变化而感知倾角的变化。在实用中除此类型外,还有在电解质溶液中留下一气泡,当装置倾斜时气泡会运动使电容发生变化而感应出倾角的“液体摆”。
气体摆式倾角传感器
“气体摆”式惯性元件由密闭腔体、气体和热线组成,当腔体所在平面相对水平面倾斜或腔体受到加速度的作用时,热线的阻值发生变化,并且热线阻值的变化是角度q或加速度的函数,因而也具有摆的效应。其中热线阻值的变化是气体与热线之间的能量交换引起的。
“气体摆”式惯性器件的敏感机理基于密闭腔体中的能量传递,在密闭腔体中有气体和热线,热线是唯一的热源。当装置通电时,对气体加热。在热线能量交换中对流是主要形式。
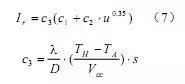
对流传热的方程为:

其中:h—热量传递系数(w/m2×k),s—热线表面积(m2),TH—热线温度(K),TA—气体温度(K)。
热量传递系数h与流体的热传导率、动力学粘度、流体速度和热线直径有关,表示为:
其中:Nu为—努塞尔(Nusselt)数,l—热传导率(W/mK),Re—雷诺(Reynold)数,U—流体速度(m2/s),D—热线的直径(m),n—流体的动力学粘度。
当气流以速度U垂直穿过热线时,

将(4)式代入(3)式得:
根据热平衡方程可得:
所以:
假设和s为常数,则有:
从式(7)可以看出,当流体的动力学粘度、密度和热传导特性一定时,若热线周围流体的速度不同,则流过热线的电流也不同,从而引起热线两端的电压也产生相应的变化。气体摆式惯性器件就是根据一原理研制的。
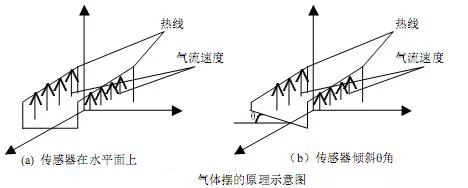
气体摆式检测器件的核心敏感元件为热线。电流流过热线,热线产生热量,使热线保持一定的温度。热线的温度高于它周围气体的温度,动能增加,所以气体向上流动。在平衡状态时,如图4(a)所示,热线处于同一水平面上,上升气流穿过它们的速度相同,即V1=V1′,这时,气流对热线的影响相同,由式(7)可知,流过热线的电流也相同,电桥平衡。当密闭腔体倾斜时,热线相对水平面的高度发生了变化,如图4(b)所示,因为密闭腔体中气体的流动是连续的,所以热气流在向上运动的过程中,依次经过下部和上部的热线。若忽略气体上升过程中克服重力的能量损失,则穿过上部热线的气流已经与下部热线的产生热交换,使穿过两根热线时的气流速度不同,这时V2¢>V2,因此流过两根热线的电流也会发生相应的变化,所以电桥失去平衡,输出一个电信号。倾斜角度不同,输出的电信号也不同。
固、液、气体摆性能比较
就基于固体摆、液体摆及气体摆原理研制的倾角传感器而言,它们各有所长。在重力场中,固体摆的敏感质量是摆锤质量,液体摆的敏感质量是电解液,而气体摆的敏感质量是气体。
气体是密封腔体内的唯一运动体,它的质量较小,在大冲击或高过载时产生的惯性力也很小,所以具有较强的抗振动或冲击能力。但气体运动控制较为复杂,影响其运动的因素较多,其精度无法达到军用武器系统的要求。
固体摆倾角传感器有明确的摆长和摆心,其机理基本上与加速度传感器相同。在实用中产品类型较多如电磁摆式,其产品测量范围、精度及抗过载能力较高,在武器系统中应用也较为广泛。
液体摆倾角传感器介于两者之间,但系统稳定,在高精度系统中,应用较为广泛,且国内外产品多为此类。
倾角传感器的应用
倾角传感器用于各种测量角度的应用中。例如,高精度激光仪器水平、工程机械设备调平、远距离测距仪器、高空平台安全保护、定向卫星通讯天线的俯仰角测量、 船舶航行姿态测量、盾构顶管应用、大坝检测、地质设备倾斜监测、火炮炮管初射角度测量、雷达车辆平台检测、卫星通讯车姿态检测等等。
海事地理
山体滑坡,雪崩——双轴倾角传感器配合液位传感器用于山体滑坡或雪崩监测,通过无线传感系统将数据传输到中央控制系统,实时监测山体状态,可以有效减小山体滑坡带来的损失。
建筑工程
高层建筑安全监测——目前世界上摩天大楼越来越多,为了监测大楼的安全性能,可以应用高精度的伺服倾角传感器,该系列倾角传感器可以感应微小角度的变化,可以用于大楼摆幅、震动、倾斜等监测。
水库大坝
大坝安全监测——大坝垮塌事故已经发生多次,为了及时发出预警信号,减少财产损失,通过倾角传感器的监测、观测仪器和设备,以及时取得反映大坝和基岩性态 变化以及环境对大坝作用的各种数据的观测和资料处理等工作。其目的是分析估计大坝的安全程度,以便及时采取措施,设法保证大坝安全运行。
挖掘机械
挖掘机——为了实现挖掘机的三维空间定位,在安装工作装置各关节角度传感器的基础上,又安装平台回转角度检测装置和平台倾角传感器,并在斗杆上安装激光接 收仪用于检测地面激光发射器发射的水平机关相对于接收仪零位的高度。建立挖掘机的运动学模式,推导车体相对于大地的坐标变换矩阵,即完成三维空间的车体定 位,并得到常用简单的车体高程定位公式,实现挖掘机挖掘轨迹的三维空间定位为实现挖掘机的三维空间轨迹精确与挖掘机深度控制打下基础。
现代汽车
汽车四轮定位——随着电子技术的发展和应用,汽车的安全性、舒适性和智能性越来越高。汽车侧向倾斜角度传感器的应用是防止汽车在行驶中发生倾翻事故的一种 有效方法。是提高汽车安全性的重要措施,特别是越野车。双层客车等重心较高的汽车更有必要性。汽车倾翻的实质是:行驶中向外的倾翻力矩大于向里的稳定力 矩,当重心高度一定时,倾斜力矩油倾翻力(向外的侧向力)决定。
机器人——近年来机器人技术发展很快,欧美等工业发达国家早就开始对各种机器人进行系统的研究,随着科技的进步和时间的推移,取得了大量的研究成果。我们知道机器人上应用了大量的传感器,其中倾角传感器可以实时监测机器人的状态。
铁路铁轨
轨检仪:目前的轨道测量方式智能程度差,测量精度低,操作时间长,迫切需要设计一种适用于一般使用的便携式智能化轨道检测仪倾角传感器用于轨检仪,用于实时检测铁道的倾斜度和高度差。
输电线塔
输电线铁塔倾斜智能监测——输电线铁塔的倒塌事件时有发生,一旦发生倒塌,将会造成巨大的损失,倾角传感器应用于输电线铁塔倾斜角度监测,可以实时监测输电线倾斜角度,一旦因为大风等自然灾害导致倾斜角度过大,实时发出预警信号,由工作人员维修减少损失。
平台控制
船载水平平台——倾角传感器在船载水平平台上应用,用于船载卫星跟踪天线的底座,以保持天线始终处于水平状态,对平台进行实时控制,可以隔离船体的俯仰和横滚运动,使平台处于水平。
太阳能
太阳能——太阳能是一种清洁的能源,它的应用正在世纪范围内普遍的增长,利用太阳能发电就是一个使用太阳能的方式,因此为了得到充足的利用太阳能,如何选择太阳能电池方位角与倾斜角是一个重要的问题,利用倾角传感器调整角度,将太阳能的利用率进一步提高。
-
传感器
+关注
关注
2550文章
51035浏览量
753044 -
电极
+关注
关注
5文章
813浏览量
27207 -
倾角传感器
+关注
关注
3文章
275浏览量
25180
原文标题:一文读懂倾角传感器原理及其应用
文章出处:【微信号:WW_CGQJS,微信公众号:传感器技术】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论