 河海大学提出自主式水下航行器通过这种新方法在海洋深处巡航
河海大学提出自主式水下航行器通过这种新方法在海洋深处巡航
海洋的深处是一个鲜有人去过的黑暗深渊,它长期以来一直是神秘的。但这个陌生的环境仍然攸关我们的利益;科学家们想知道哪里的污染最严重,哪里的海底发生地震。被动传感器可以收集这样的数据,但在这种阴暗的环境中传输数据是一个挑战。
河海大学的韩光洁和他的同事们提出了一种新方法,自主式水下航行器(AUV)通过这种新方法在海洋深处巡航,能更好地收集这些传感器的数据。他们的设计于3月27日发表在了IEEETransactionsonMobileComputing上。
照片来源:韩光洁
在东海下水的“C-shark”自主式水下航行器。
每个传感器(称为节点)在收集数据时都是静止不动的。与此同时,一队AUV被分派到网络上,沿着预定的轨迹巡航,从每个节点收集数据。
无线电波被水吸收,因此水下传感器和航行器通常通过声波信号来发射和接收信息。但是声波在水中传播的速度和距离都不及在空中传播的无线电波。
随着AUV的增多,挑战也越来越多。韩教授说:“特别是,由于水声通信质量差、通信距离短,AUV之间很难直接通信和同步信息。”
更重要的是,不靠近AUV计划路径的节点必须将其数据中继到与AUV足够接近的其他节点以传输数据。这就在网络中创建了“热区”,其中一些节点负担过重,可能耗尽能量并停止运转。韩教授说,“在热区的一些节点停止运转后,热区附近的节点可能无法找到一个与之通信的邻居节点,从而导致数据丢失。”
在他们新提出的称为HAMA(High-Availability data collection scheme based onMulti-AUVs,基于多AUV的高可用性数据收集方案)的方法,AUV能够调整它们的巡航轨迹,以缓解热区问题。同样,HAMA具有故障发现和修复机制,避免了在一些AUV发生故障时数据丢失。如果一个节点试图向AUV发送数据时发现AUV已发生故障,则它使用多跳通信方法通知其他节点。然后,功能良好的AUV将取代故障AUV来收集数据。
照片来源:韩光洁
一艘自主式水下航行器在水中巡航。
研究人员在许多vwin 中测试了他们的方法。韩教授说:“模拟结果表明,与其他算法或方案相比,采用HAMA可以延长网络的生存期,降低并平衡节点的能量消耗,提高数据包的交付率。”
虽然这种方法确实具有许多优点,但与论文中提到的其他方法相比,它会导致接收信息的延迟时间更长。这在需要及时更新信息时(例如,海底火山正在爆发时),可能是有问题的。韩教授和他的团队计划在之后的研究工作中解决这个问题。
韩教授说:“我们认为网络延迟主要是由数据传输时间、数据处理时间和AUV的运动造成的。因此,在未来,我们将从这些方面减少网络延迟。”
-
传感器
+关注
关注
2550文章
51035浏览量
753067 -
传输数据
+关注
关注
1文章
122浏览量
16101 -
水下航行器
+关注
关注
0文章
15浏览量
8644
原文标题:河海大学提出一种使水下网络更可靠的路由方案
文章出处:【微信号:IEEE_China,微信公众号:IEEE电气电子工程师】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
六博光电推出水下光通信实验与仿真教学平台
一种降低VIO/VSLAM系统漂移的新方法

大华股份荣获2024年中国创新方法大赛一等奖

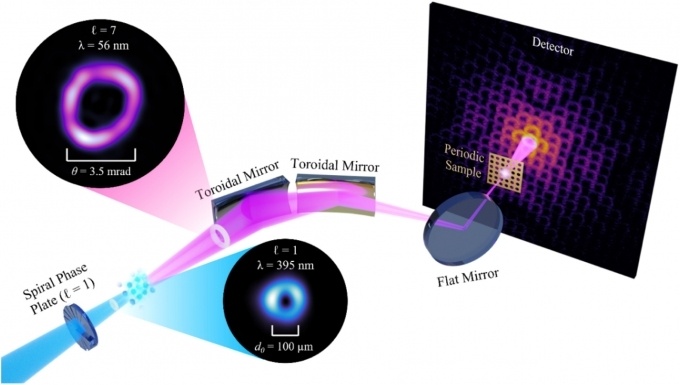
利用全息技术在硅晶圆内部制造纳米结构的新方法

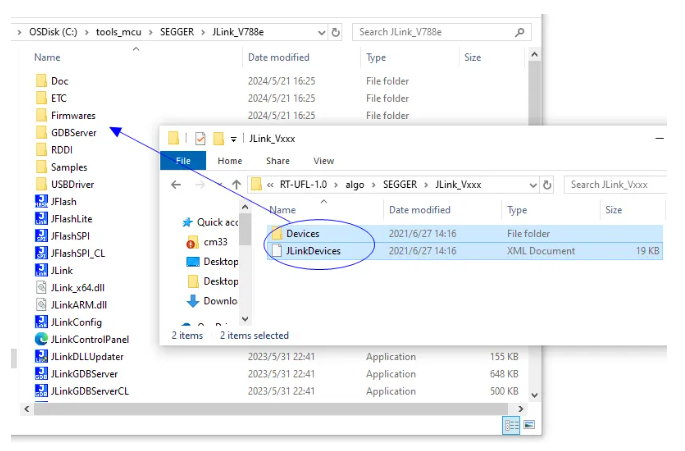
实践JLink 7.62手动增加新MCU型号支持新方法
一种无透镜成像的新方法
名单公布!【书籍评测活动NO.36】嵌入式机电一体化系统设计与实现
天津大学海洋学院声光探测团队在水下激光雷达探测领域取得新进展

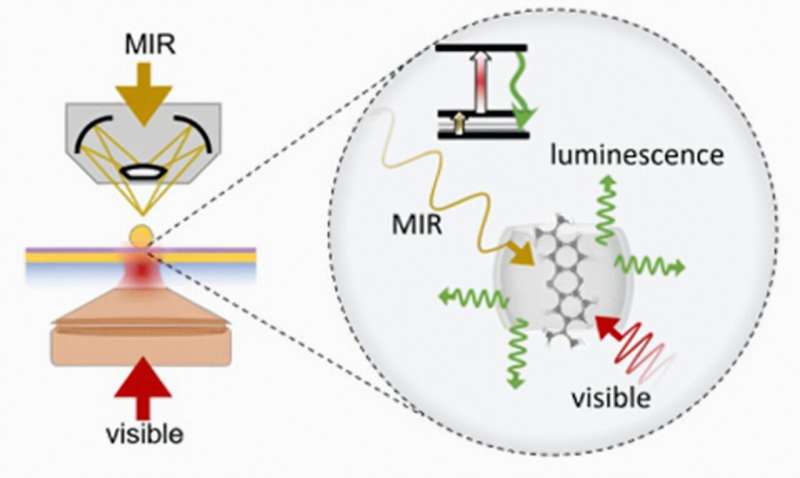
使隐形可见:新方法可在室温下探测中红外光
水下航行器电机的SiC MOSFET逆变器设计






 工商网监
工商网监
评论