 基于3D视觉导航的智能料箱搬运机器人在智能制造中的应用
基于3D视觉导航的智能料箱搬运机器人在智能制造中的应用
近年来,在国家对智能制造的大力支持下,智能搬运机器人在智能制造中的应用非常火热。其主要应用场景为仓库或线边仓收发料、原材料或半成品在产线各工序间的自动流转。但在实际应用场景中,也存在一些比较难以解决的问题。
本文根据目前搬运机器人在智能制造产线使用过程中碰到的一些问题,提出我们认为更柔性、性价比更好的解决方案供大家探讨,以便更好推动智能机器人在智能制造项目中的实际应用落地。
一目前使用过程中的主要问题。
1.仓库收发料的自动化解决方案投资回报率不高:
目前,工厂仓库如果要实现自动收发料,一般的解决方案是小型立库+智能搬运机器人。但立库投资较大,适合于高楼层大型仓库;而工厂为了能够及时发料,一般要求库房和产线的距离不要太远,基本上是同栋楼甚至是同层,这种情况下楼层跳高一般只有4米左右,立库的投资就显得不太合适。
2.产线对接点多,难以保证各个对接点的一致性:
目前,搬运机器人一般是通过辊筒和产线对接,这就要求产线上各个对接码头的辊筒高度和有效宽度要保持一致,否则容易出现掉料和卡料的问题。
3.产线环境复杂,智能机器人定位导航的长期稳定性存在风险:
一般产线上机器人行走通道较窄,并且周边环境可能不断变化,譬如,产线两边会有各种临时放置的料车,随时会拉走,造成周边环境变化。这对于目前基于2D激光SLAM的无轨导航技术提出了很高的要求,目前大家也是通过针对具体环境特定的方法来提升激光SLAM导航方案的鲁棒性。当然,如果通过固定轨道的磁条导航或是二维码导航,可以解决机器人行走通道的问题,但是日常维护方面会比较麻烦。
二很吸引人的一个解决方案。
前不久BostonDynamics展示的这段视频,大家看后都拍手称赞,这个应该是比较理想的用来完成物料搬运和上下料的机器人。目前,BostonDynamics的Handle 还只是原型产品,离商业化还有很长的距离,至于客户最关心的性价比或投资回报率,那就更无从谈起了。
三可行的解决方案。
智能料箱搬运机器人
1.自动从库房货架拣取相应的料箱,搬运到产线,并自动识别产线输送线的高度,把料箱放置到输送线上。
2.可以根据料箱的具体高度,一次性可以携带多箱。以更少的机器人实现更高频的配送,不仅能够满足产线物料高频次出入库的需求,还可以解决产线过道窄导致的多车交互难题。
3.采用成熟的夹抱式拣取结构,机器人可以同时适合多种料箱规格,真正柔性化解决上下料的问题。
4.跟WMS/MES/ERP无缝对接,实现生产信息化,自动化。
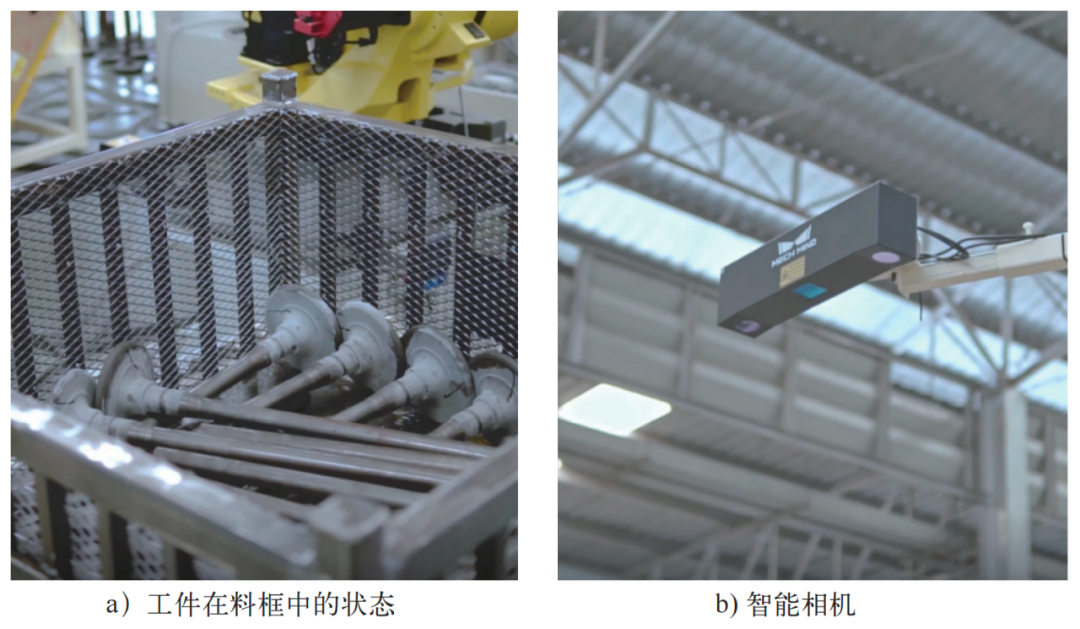
5.基于整个空间的3D视觉导航,不会受到路线两边环境变化的影响,导航更可靠,且无需粘贴标记。
基于视觉的3D建图
- 机器人
+关注
关注
209文章
27735浏览量
203709 - 3D视觉
+关注
关注
4文章
420浏览量
27397
原文标题:【昊志机电谐波 | 案例】基于3D视觉导航的智能料箱搬运机器人在智能制造中的应用
文章出处:【微信号:gaogongrobot,微信公众号:高工机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先登录
相关推荐
智能移动机器人

3D视觉技术在惯性环上料领域的未来发展
3C薄片自动化上料,3D视觉技术如何赋能?

富唯智能案例|3D视觉引导机器人抓取鞋垫上下料


稳石AMR机器人在智能制造业中带来哪些帮助?









 工商网监
工商网监
评论