PROFINET IO网络支持总线型,星型,环型,树型或混合结构。在应用中,尤其是存在大型且复杂的P....
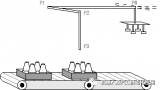
下图显示了一个站,用于将玻璃容器从托盘上移走。传送带再将托盘传送到站。
在以下部分中,将在组织块“Main” 中调用 SCL 函数块“SCL_Best_before_da....

此指令在机器人运动过程中为一定义长度的脉冲进行了赋值。该脉冲将在设定的时间段内一直保持于已定义了的电....

OP77B HMI 设备通过 MPI 网络连接到果汁搅拌系统的 PLC。

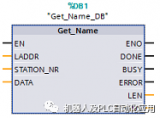
“Get_Name”指令读取 PROFINET IO 设备、PROFIBUS 从站或 AS-i sl....
简介 可使用WinCC flexible的集成编程接口在运行时访问某部分项目数据。通过Visual ....

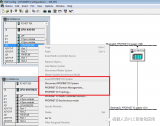
在“设备和网络”编辑器中可创建下列通信伙伴。

PID_3Step 与 PID_Compact 的指令参数类似也分为以下主要两部分:输入参数与输出参....

“获取最小值”指令比较可用输入的值,并将最小的值写入输出 OUT 中。在指令框中可以通过其它输入来扩....

在交叉引用列表中,可显示项目树中所选源对象的参考对象和下属对象。

当一个值被指定,变量的当前值被通过表达式指定的新的值代替。此表达式也能够包含函数标识符,其被语句激活....

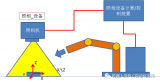
首先要建立机器人的轨迹,作为基础机器人编程轨迹.
IF (($LOAD.M0) AND ($LOAD.J.X==0) AND($LOAD.J.Y==0....

使用“循环右移”指令,将参数 IN 的内容逐位向右循环移位,并将结果赋值给指定的操作数。

可以使用指令“构建程序代码”,在 SCL 块中构建程序代码并将其分为几个不同区域。
可以在编程窗口中使用区域导航内的“报警”窗格,定义报警的属性和内容。仅当监视的错误已经解决并且满足以....

同一个设备可以在不同的机器人上交替运行。为此必须使用其他的 IOCTL 功能进行解耦和耦合。

简易的机器人和PLC信息提取。

出于产品测试和质量控制的目的,报表用于记录生产过程中的事件。这些事件,即报警和配方数据,以班次报表的....

PROFINET 网络中的设备在分配名称后才可与 CPU 连接。

STL (语句列表)是一种基于文本的编程语言,可用于编写逻辑块。STL 程序以程序段的形式组成。
通过可设定的软件限位开关范围,可限制所有机械手和定位轴的轴运动范围。

在发生通信错误、F- I/O 错误或通道错误发生后,该指令将为 F 运行组中的所有 F-I/O ....
在F-CPU的“属性”选项卡中,选中“F-capability activated”复选框(默认设置....

在以下示例中,将通过 GETIO 读取数字量输入模块的通道,并通过 SETIO 将新值写入数字量输出....

为了获得 MMC 卡的序列号,必须使用 SFC 51 "RDSYSST" 读出系统状态列表 (SSL....

该模块将Robot的输出数据复制到Robot结构中。

可以通过SFC 51读取CPU的指示灯状态,使用的SSL_ID参数为16#74(16#19)读取全部....

在以下示例中,可通过 RDREC 读取 IO 设备的诊断数据记录“16#E00A”。触发断路时,系统....




 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1

