 德赢Vwin官网
App
德赢Vwin官网
App


超声波传感器是将超声波信号转换成其他能量信号(通常是电信号)的传感器。超声波是振动频率高于20KHz的机械波。它具有频率高、波长短、绕射现象小,特别是方向性好、能够成为射线而定向传播等特点。超声波对液体、固体的穿透本领很大,尤其是在阳光不透明的固体中。超声波碰到杂质或分界面会产生显著反射形成反射成回波,碰到活动物体能产生多普勒效应。超声波传感器广泛应用在工业、国防、生物医学等方面。
超声波传感器测距模块
本文所设计的超声波传感器主要应用于实现智能小车的遮障要求,主要内容是CD4051的简单电路实现多路超声波信号的循环发射与接收电路以及接收芯片CX20106的使用情况,最后给出了如何提高精度的方法,从而增强了系统的可靠性。
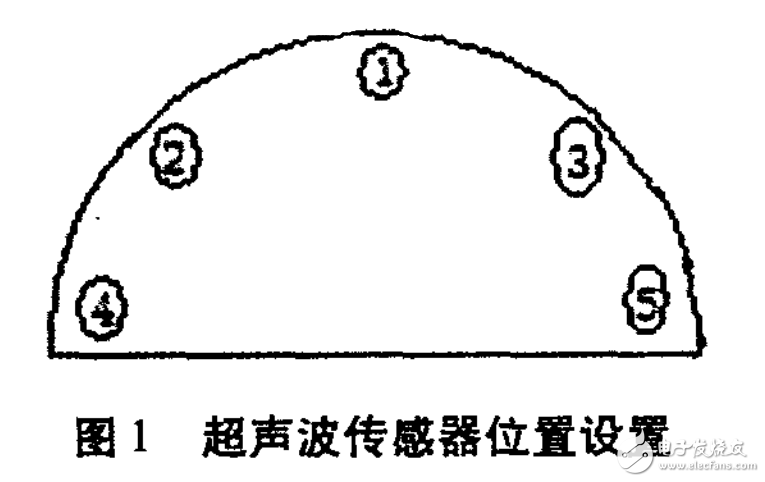
本系统由STC89C52单片机作为控制系统核心,五路超声波传感器分别测量小车左方、左前方、前方、右前方、右方障碍物的距离,并根据所测数据采取相应的避障措施。超声波传感器位置如图所示。
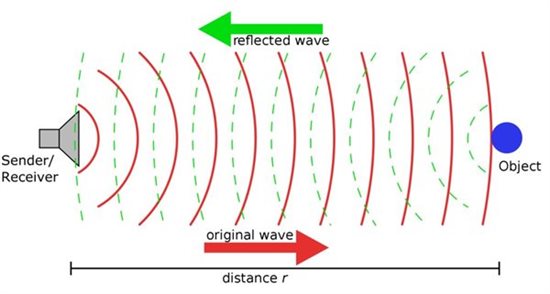
超声传感器的工作原理
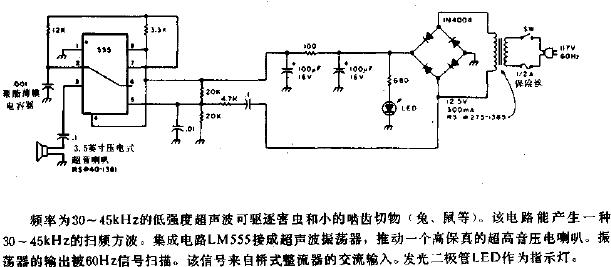
当40KHz的脉冲电信号输人后,由压电陶瓷激励器和谐振片转换成机械振动,经锥形辐射器将超声振动信号向外发射出去。发射出的超声波向空中四面八方直线传播,遇到障碍物后它可以发生反射。接收器在收到由发射器传来的超声波后,使内部的谐振片谐振,通过声电转换作用将声能转换为电脉冲信号,然后输入信号放大器,最后驱动执行器使电路动作。本文采用的是渡越时间法,就是通过检测发射的超声波与其遇到障碍物后产生回波之间的时间差△t,求出障碍物的距离d。计算公式为d=CAt/2,其中c=331.4,(1+T/273)^1/2为超声波波速,T为环境摄氏温度。在使用时,如果温度变化不大,则可认为声速是基本不变的;但如果测距精度要求很高,则应通过温度补偿的方法加以校正。
本文采用的是TCT40—10R/T接收分体式压电陶瓷超声传感器,系统框图如下图所示。
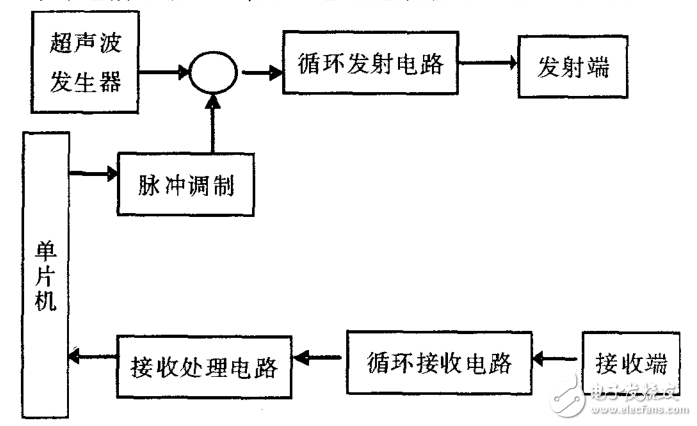
超声波测距系统框图
超声波发生器产生40kHz的方波,经脉冲调后驱动发射端的超声波传感器,发出同频率的正弦波。在每个调制脉冲到来时,换能器发出8一l2个周期的超声波,同时启动单片机的计数器定时。超声波被测量目标反射后由接收端的传感器转换为电信号,经处理电路后产生中断,同时单片机停止计数,然后由计数差计算障碍物的距离。
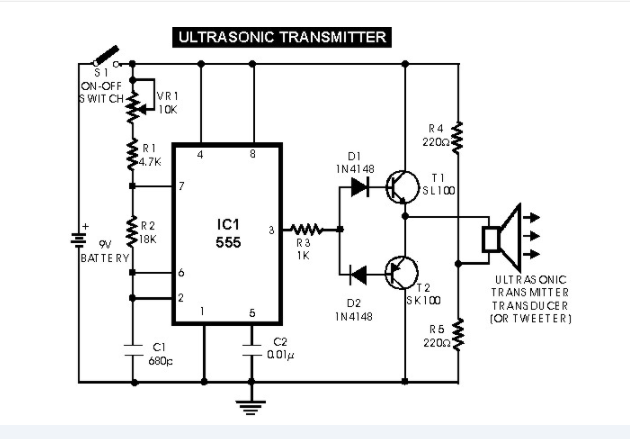
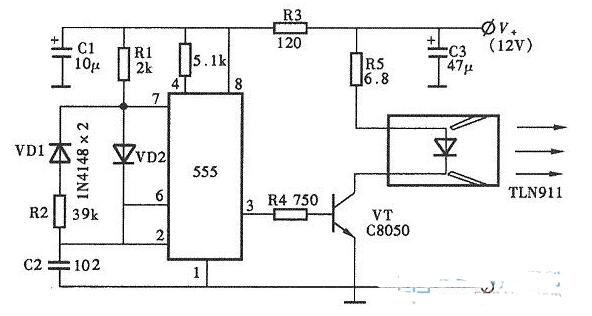
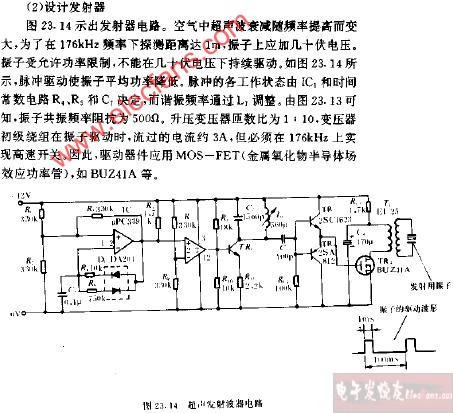
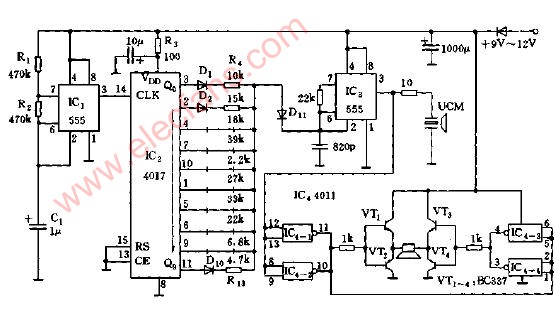
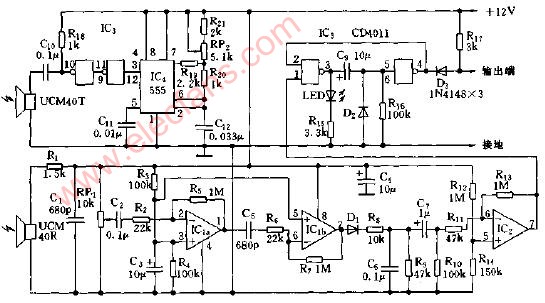
超声波发生电路

超声波发生器及信号调制前后对比
如图所示,根据超声波传感器的工作特点,选择NE555产生40K的方波,占空比为50%,电源电压为5V。脉冲调制由单片机PI.0口控制NE555的复位(RST)引脚实现。P1.0=1时,3脚输出40kHz的方波,持续8—12个周期。持续周期数若太少,难以正常激励超声波探头,若太多则发射波与反射波容易产生叠加干扰,P1.0=0时,3脚无信号输出。低电平持续时间由测量距离决定,测量距离越大,低电平持续时间越长。
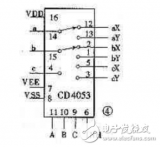
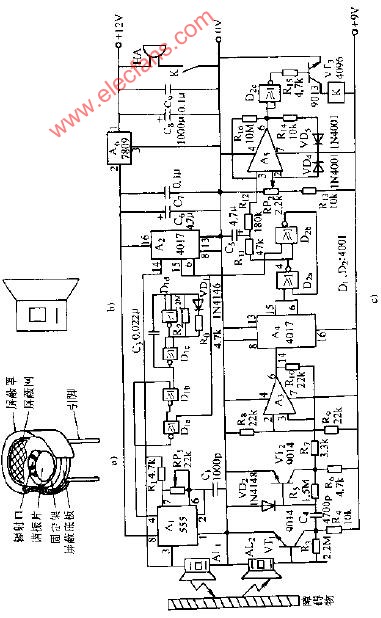
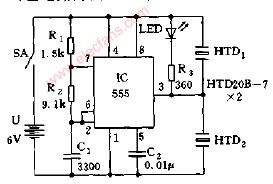
循环接收、发射电路
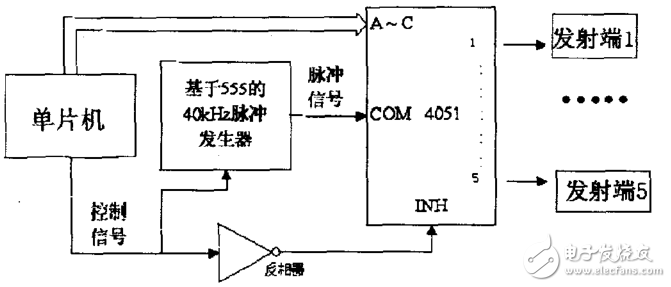
超声波循环发射电路
循环发射电路主要采用一个多路vwin 开关CD4051进行控制发射顺序,如图所示J。INH是控制输入引脚,该引脚呈逻辑高电平时,所有通道关闭,反之,通道开通状态受地址选择端A~C控制。上图所示控制信号与超声波发生电路中的控制信号相同,当为逻辑高电平时,NE555的3脚输出调制信号,同时经反相器反相后CD4051正常工作。在一路发射器发射完毕后,控制信号输出低电平复位555,同时反相施加在4051的引脚INH上,关闭所有通道。
循环接收电路同样采用CD4051,电路同接收电路基本相同。接收电路和发射电路采用相同的地址控制信号,即发射组正好与接收组相对应,例如1号发射传感器与1号接收传感器相对应。接收端CD4051的INH引脚由单片机PI.2控制,当一路发射器脉冲发射完毕后,经过一定的盲区延时,PI.2输出低电平,接通相应通道。低电平持续时间与PI.0控制信号相同,如果在控制信号低电平这段时间内没有检测到回波信号,则P1.2输出高电平禁止再接收,如果检测到回波信号,停止计数器计数,读取计数值,进入下一通道的发射与接收。
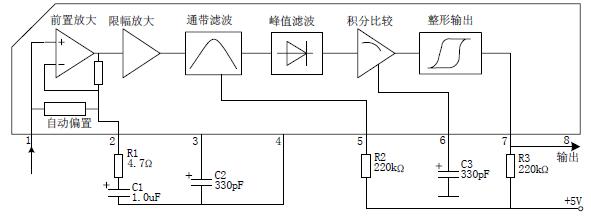
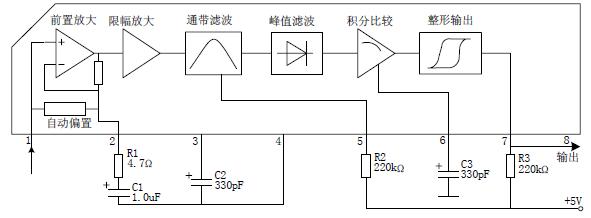
接收处理电路

超声波接受电路
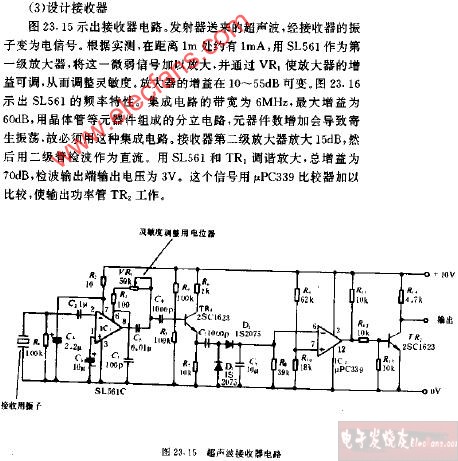
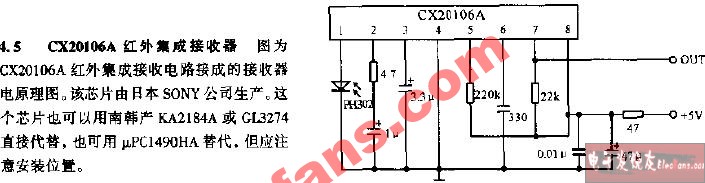
如图所示,超声波接收电路一般由以下几个部分组成,前置放大、限幅放大、带通滤波、峰值检波、施密特整形输出电路,为了减少干扰又有足够的放大增益,还能大大简化电路,使系统更稳定,本文采用了红外线接收电路的芯片CX20106。该芯片是日本索尼公司生产的红外专用集成芯片,也可用于超声波检测。
超声接发端接收到的信号经电容C4耦合后输入1端,总增益大小由2脚接收器的电阻和电容决定,通常选用参数为R1=4.7Ω,C1=1μF。3脚为检波电容,电容量大为平均值检波,瞬间相应灵敏度低;若容量小,则为峰值检波,瞬间相应灵敏度高,但检波输出的脉冲宽度变动大,易造成误动作,推荐参数为3.3μf。5脚与地之间接人一个电阻,改变阻值,可改变载波信号的接收频率,取R=200kΩ时,f0≈42kHz,若取R=220kΩ,则中心频率f0≈38kHz。6脚为积分电容,一般取330PF,如果该电容取得太大,会使探测距离变短。7脚为输出端,它是集电极开路输出方式,因此该引脚必须接上一个上拉电阻到电源端,推荐阻值为22kΩ。8脚为电源。因此在允许接收的这段时间内如果没有检测到回波信号,则是该端输出为高电平,若有信号时则产生下降。因此利用这一特点,将7脚输出信号接至89C52的T2EX,当检测到障碍物时,7脚输出一个低脉冲,并将定时器2中的TL2和TH2当前值各自捕获到RCAP2L和RCAP2H中,同时引起中断。
系统软件设计
本系统采用STC89C52作为主控芯片,其内部有512K的数据存储器和8K的程序存储器,并有-ID、T1、rI2共3个定时器可供使用。程序流程图如图6所示。NE555产生的40K方波经过P1.0信号调制后,通过C~051选择通道,然后驱动传感器发出超声波。超声波遇到障碍物反射后,传到超声波接收端,这个信号经过红外处理芯片后送到单片机。当c)(20lo6捕捉到40kHz的超声波后其输出引脚由高电平变为低电平,这个引脚上的负跳变可作中断来引起单片机中断。在中断服务程序中,定时器停止计数,定时器定时时间即为超声波从发射到接收的时间差,再根据S=vV2就可以算出来测量的距离。最后单片机再根据五路传感器所测障碍物的距离采取相应的避障措施。
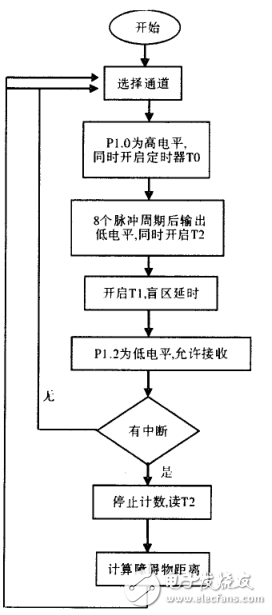
系统软件框图
误差分析及补偿
测距系统一般由超声波发送、接收、时间计测、微机控制和计算距离五个部分组成。提高测量精度常用的措施有提高计时精度、减少时间量化误差和补偿温度对传播声速的影响。由于本系统对精度要求不高,可采用单片机定时并认为超声波速度恒定。
总结
该系统设计简单、成本低、实时性好,在室内环境中取得了预期的实验结果,使智能小车无碰撞地避开障碍物。该系统有抗干扰能力强、控制过程简单、精度高和成本低等突出的特点,可以广泛应用于门禁系统、小区巡逻、实地勘测、智能玩具等领域,市场前景广阔,具有很大经济效益。













 工商网监
工商网监
评论