 德赢Vwin官网
App
德赢Vwin官网
App


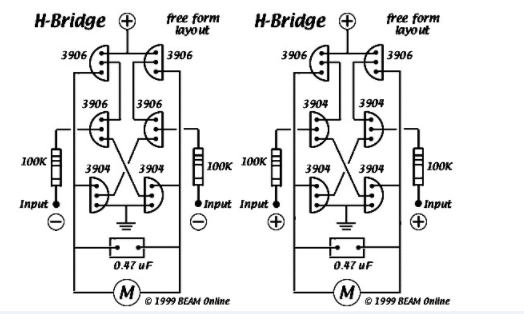
H桥是什么?
H桥是一个典型的直流电机控制电路,因为它的电路形状酷似字母H,故得名与“H桥”。4个三极管组成H的4条垂直腿,而电机就是H中的横杠。 长期以来,直流电机以其良好的线性特性、优异的控制性能等特点成为大多数变速运动控制和闭环位置伺服控制系统的最佳选择。直流电机驱动控制电路分为光电隔离电路、电机驱动逻辑电路、驱动信号放大电路、电荷泵电路、H桥功率驱动电路等四部分。
直流电机驱动使用最广泛的就是H型电路,这种驱动电路方便地实现直流电机的四象限运行,分别对应正转、正转制动、反转、反转制动,下面就和松文机电一起了解一下这种驱动的原理与设计。
直流电机H桥电路驱动原理
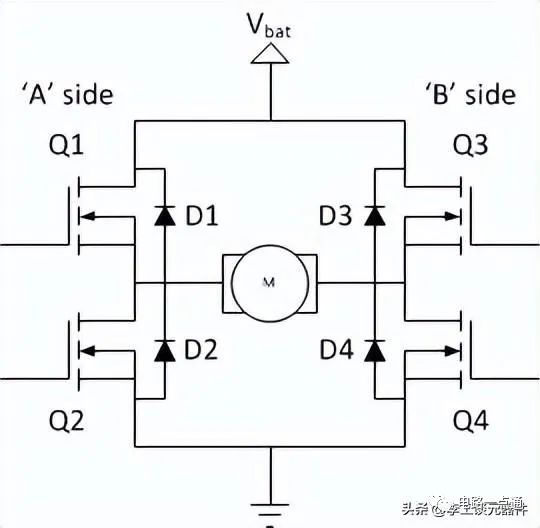
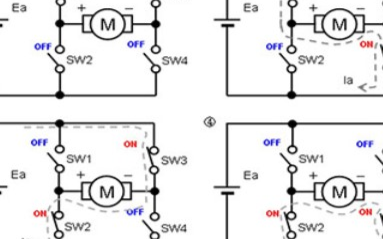
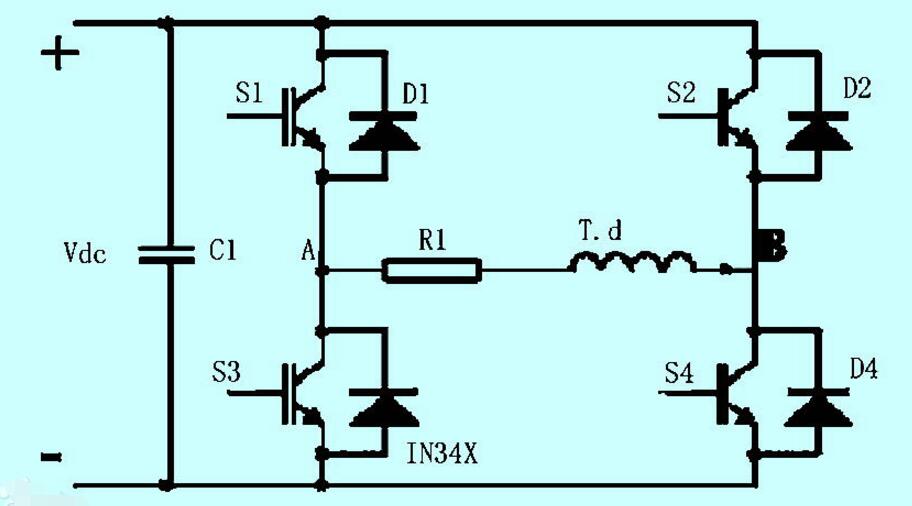
全桥式驱动电路的4只开关管都工作在斩波状态。S1、S2为一组,S3、S4为一组,这两组状态互补,当一组导通时,另一组必须关断。当S1、S2导通时,S3、S4关断,电机两端加正向电压实现电机的正转或反转制动;当S3、S4导通时,S1、S2关断,电机两端为反向电压,电机反转或正转制动。
实际控制中,需要不断地使电机在四个象限之间切换,即在正转和反转之间切换,也就是在S1、S2导通且S3、S4关断到S1、S2关断且S3、S4导通这两种状态间转换。这种情况理论上要求两组控制信号完全互补,但是由于实际的开关器件都存在导通和关断时间,绝对的互补控制逻辑会导致上下桥臂直通短路。为了避免直通短路且保证各个开关管动作的协同性和同步性,两组控制信号理论上要求互为倒相,而实际必须相差一个足够长的死区时间,这个校正过程既可通过硬件实现,即在上下桥臂的两组控制信号之间增加延时,也可通过软件实现。
一、H桥式电机驱动电路
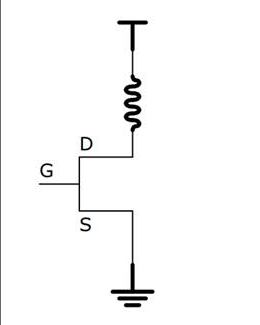
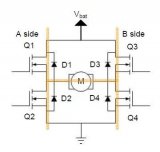
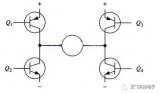
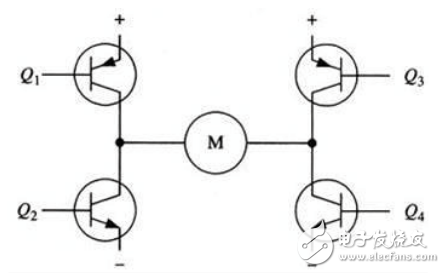
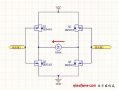
图4.12中所示为一个典型的直流电机控制电路。电路得名于“H桥式驱动电路”是因为它的形状酷似字母H。4个三极管组成H的4条垂直腿,而电机就是H中的横杠(注意:图4.12及随后的两个图都只是示意图,而不是完整的电路图,其中三极管的驱动电路没有画出来)。
如图所示,H桥式电机驱动电路包括4个三极管和一个电机。要使电机运转,必须导通对角线上的一对三极管。根据不同三极管对的导通情况,电流可能会从左至右或从右至左流过电机,从而控制电机的转向。
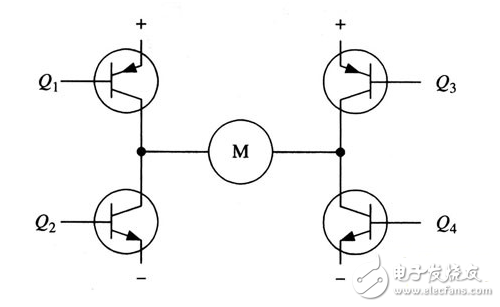
图4.12 H桥式电机驱动电路
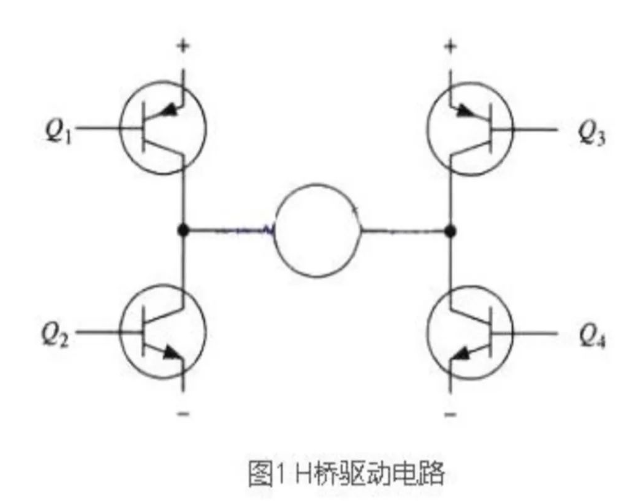
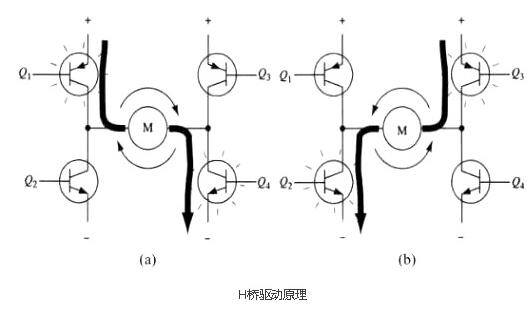
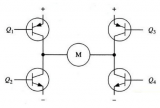
要使电机运转,必须使对角线上的一对三极管导通。例如,如图4.13所示,当Q1管和Q4管导通时,电流就从电源正极经Q1从左至右穿过电机,然后再经Q4回到电源负极。按图中电流箭头所示,该流向的电流将驱动电机顺时针转动。
当三极管Q1和Q4导通时,电流将从左至右流过电机,从而驱动电机按特定方向转动(电机周围的箭头指示为顺时针方向)。
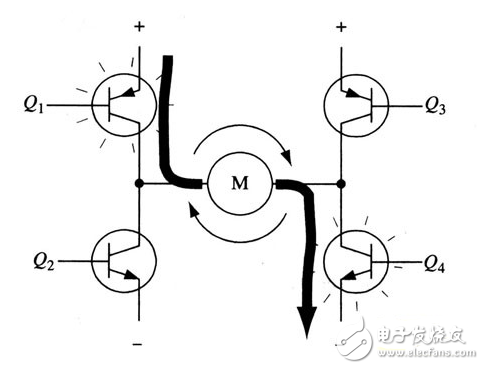
图4.13 H桥电路驱动电机顺时针转动
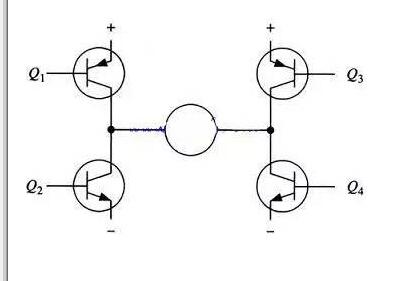
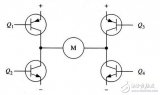
图4.14所示为另一对三极管Q2和Q3导通的情况,电流将从右至左流过电机。
当三极管Q2和Q3导通时,电流将从右至左流过电机,从而驱动电机沿另一方向转动(电机周围的箭头表示为逆时针方向)。
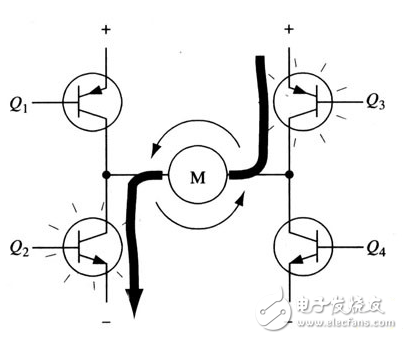
图4.14 H桥电路驱动电机逆时针转动
二、使能控制和方向逻辑
驱动电机时,保证H桥上两个同侧的三极管不会同时导通非常重要。如果三极管Q1和Q2同时导通,那么电流就会从正极穿过两个三极管直接回到负极。此时,电路中除了三极管外没有其他任何负载,因此电路上的电流就可能达到最大值(该电流仅受电源性能限制),甚至烧坏三极管。
基于上述原因,在实际驱动电路中通常要用硬件电路方便地控制三极管的开关。
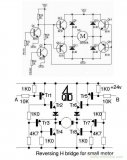
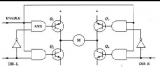
图4.155所示就是基于这种考虑的改进电路,它在基本H桥电路的基础上增加了4个与门和2个非门。4个与门同一个“使能”导通信号相接,这样,用这一个信号就能控制整个电路的开关。而2个非门通过提供一种方向输人,可以保证任何时候在H桥的同侧腿上都只有一个三极管能导通。(与本节前面的示意图一样,图4.15所示也不是一个完整的电路图,特别是图中与门和三极管直接连接是不能正常工作的。)
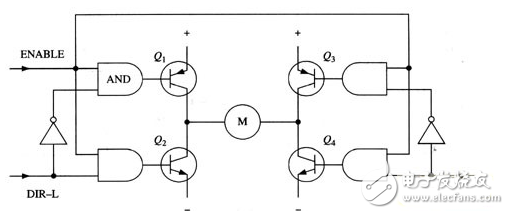
图4.15 具有使能控制和方向逻辑的H桥电路
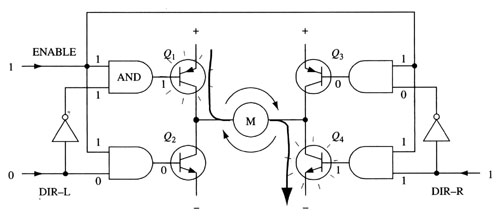
采用以上方法,电机的运转就只需要用三个信号控制:两个方向信号和一个使能信号。如果DIR-L信号为0,DIR-R信号为1,并且使能信号是1,那么三极管Q1和Q4导通,电流从左至右流经电机(如图4.16所示);如果DIR-L信号变为1,而DIR-R信号变为0,那么Q2和Q3将导通,电流则反向流过电机。
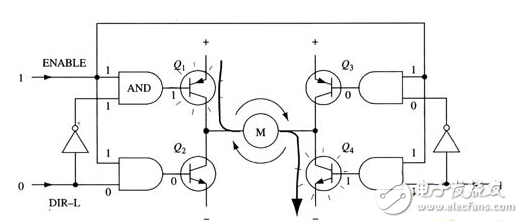
图4.16 使能信号与方向信号的使用
实际使用的时候,用分立件制作H桥式是很麻烦的,好在现在市面上有很多封装好的H桥集成电路,接上电源、电机和控制信号就可以使用了,在额定的电压和电流内使用非常方便可靠。比如常用的L293D、L298N、TA7257P、SN754410等。










 工商网监
工商网监
评论