 德赢Vwin官网
App
德赢Vwin官网
App


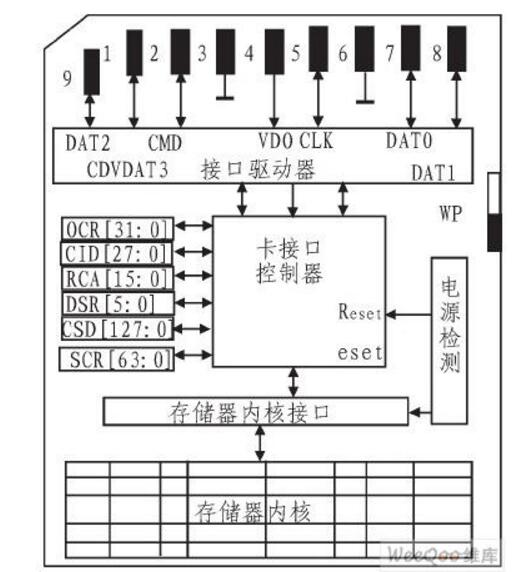
SD 卡有两个可选的通讯协议:SD 模式和 SPI模式 SD 模式是SD 卡标准的读写方式,但是在选用SD 模式时,往往需要选择带有SD 卡控制器接口的 MCU,或者必须加入额外的SD卡控制单元以支持SD 卡的读写 然而,大多数MCU都没有集成SD 卡控制器接口,若选用SD 模式通讯就无形中增加了产品的硬件成本。
在SD卡数据读写时间要求不是很严格的情况下, 选用 SPI模式可以说是一种最佳的解决方案 因为在 SPI模式下,通过四条线就可以完成所有的数据交换,并且目前市场上很多MCU都集成有现成的SPI接口电路,采用 SPI模式对 SD卡进行读写操作可大大简化硬件电路的设计。
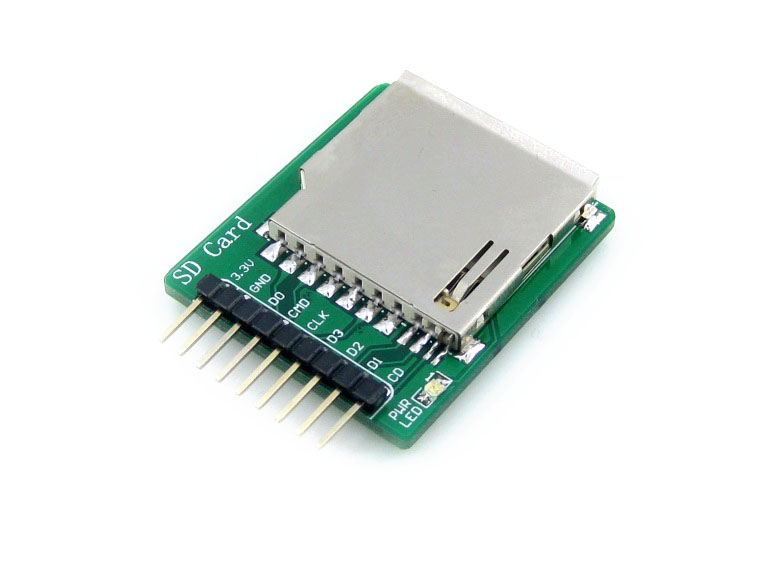
一、硬件连接
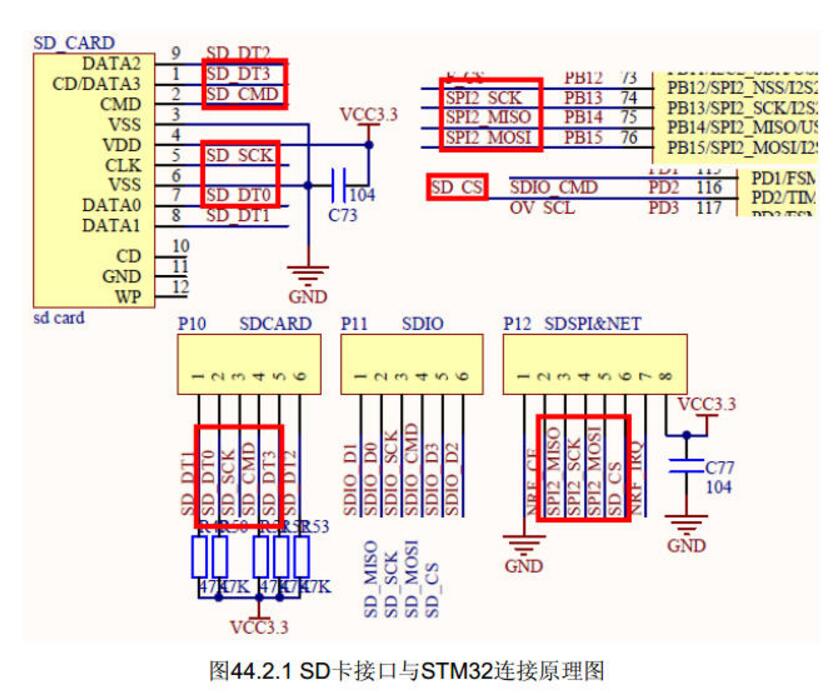
SD_CS接STM32的PD2
SD_MOSI接STM32的SPI2_MOSI
SD_MISO接STM32的SPI2_MISO
SD_SCK接STM32的SPI2_SCK
SD卡座都连了一个47K的上拉电阻
二、程序
1、初始化函数 SD_Initialize(void)
//SPI硬件层初始化
void SD_SPI_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOD|RCC_APB2Periph_GP IOG, ENABLE); //使能PB端口时钟
//设置硬件上与SD卡相关联的控制引脚输出
//避免NRF24L01/W25Q32等的影响
//这里PB12和PG7拉高,是为了防止影响FLASH的烧写。
//因为他们共用一个SPI口。
//PG7,PD2接的NRF CS和SD CS
//他们和SPI FLAS共用一个SPI,所以得分时复用!!
//这就是为什么要设置PG7,PD2了,禁止NRF和SD卡,从而SPI FLASH可以独占SPI。
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12; //PB12 推挽
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_12); //PB12上拉
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; //PD2 推挽
GPIO_Init(GPIOD, &GPIO_InitStructure);
GPIO_SetBits(GPIOD,GPIO_Pin_2);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7; //PG7 推挽
GPIO_Init(GPIOG, &GPIO_InitStructure);
GPIO_SetBits(GPIOG,GPIO_Pin_7);
SPI2_Init(); //SPI2初始化
SD_CS=1; //不选中SD卡
}
//SD卡初始化的时候,需要低速,SD卡初始化的时候时钟不能大于400K。
void SD_SPI_SpeedLow(void)
{
SPI2_SetSpeed(SPI_BaudRatePrescaler_256);//设置到低速模式
}
//向SD卡发送一个命令
//SD卡的命令是48位,命令索引8位,命令参数32位,CRC校验值8位
//输入: u8 cmd 命令索引,比如 CMD0,CMD8,CMD17,CMD24等
// u32 arg 命令参数
// u8 crc crc校验值,高7位有效,最低位恒为1.
//返回值:SD卡返回的响应
u8 SD_SendCmd(u8 cmd, u32 arg, u8 crc)
{
u8 r1;
u8 Retry=0;
SD_DisSelect();//取消上次片选
if(SD_Select())return 0XFF;//片选失效
//发送
SD_SPI_ReadWriteByte(cmd | 0x40); //分别写入命令,命令的最高2位是01,也就是0x40,cmd是6位有效
SD_SPI_ReadWriteByte(arg 》》 24); //发送参数,从高位开始
SD_SPI_ReadWriteByte(arg 》》 16);
SD_SPI_ReadWriteByte(arg 》》 8);
SD_SPI_ReadWriteByte(arg);
SD_SPI_ReadWriteByte(crc); //最后发送CRC,CRC的最低位恒为1.
if(cmd==CMD12)SD_SPI_ReadWriteByte(0xff);//Skip a stuff byte when stop reading
//等待响应,或超时退出
Retry=0X1F;
do
{
r1=SD_SPI_ReadWriteByte(0xFF);
}while((r1&0X80) && Retry--);
//返回状态值 r1
return r1;
}
//等待卡准备好 ,SD卡写的时候,会拉低MISO=0,直到数据写入完成,MISO才变为1.
//返回值:0,准备好了;其他,错误代码
u8 SD_WaitReady(void)
{
u32 t=0;
do {
if(SD_SPI_ReadWriteByte(0XFF)==0XFF)return 0;//写入完成,OK
t++;
}while(t《0XFFFFFF);//MISO一直是0的时候等待 ,直到超时。
return 1;
}
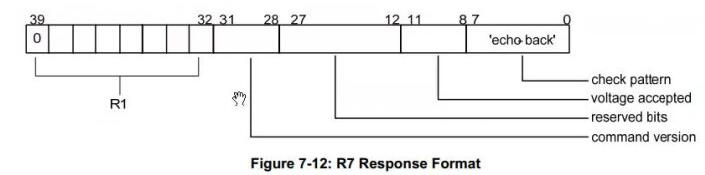
R7响应的格式
//初始化 SD 卡
u8 SD_Initialize(void)
{
u8 r1; // 存放 SD 卡的返回值
u16 retry; // 用来进行超时计数
u8 buf[4];
u16 i;
SD_SPI_Init(); //初始化 IO
SD_SPI_SpeedLow(); //设置到低速模式
for(i=0;i《10;i++)SD_SPI_ReadWriteByte(0XFF);//发送最少 74 个脉冲
retry=20;
do
{
r1=SD_SendCmd(CMD0,0,0x95);//进入 IDLE 状态,是否进入空闲状态,r1=0x01.
}while((r1!=0X01) && retry--);
SD_Type=0;//默认无卡
if(r1==0X01) //如果SD卡进入空闲状态。
{
if(SD_SendCmd(CMD8,0x1AA,0x87)==1)//SD V2.0 //发送CMD8区分是不是2.0的卡
//如果有响应,就是V2.0的卡
//CMD8是R7响应
{
for(i=0;i《4;i++)buf[i]=SD_SPI_ReadWriteByte(0XFF); //连续读4个字节,得到R7响应的值
//Get trailing return value of R7 resp
if(buf[2]==0X01&&buf[3]==0XAA)//卡是否支持 2.7~3.6V
{
retry=0XFFFE;
do
{
SD_SendCmd(CMD55,0,0X01); //发送ACMD41命令前要先发送 CMD55
r1=SD_SendCmd(CMD41,0x40000000,0X01);//发送 ACMD41,设置HCS位=1.表示主机支持SDHC卡
}while(r1&&retry--); //r1响应最低位是1,说明SD卡在空闲状态,如果SD卡进入正常工作状态,r1最低位是0
//一直等扫r1是0,表示SD卡成功接收到了指令,可以开始下一步操作。
if(retry&&SD_SendCmd(CMD58,0,0X01)==0)//判断CCS位,鉴别 SD2.0 卡版本开始
{
for(i=0;i《4;i++)buf[i]=SD_SPI_ReadWriteByte(0XFF);//得到 OCR 寄存器的值
if(buf[0]&0x40)SD_Type=SD_TYPE_V2HC; //检查 CCS,如果是1,表示是SDHC的卡
else SD_Type=SD_TYPE_V2; //如果是0,表示卡是标准的2.0版本SD卡
}
}
}else//SD V1.x/ MMC V3 //如果不支持CMD8指令,表示卡是V1.xx版本的SD卡或MMC卡
{
SD_SendCmd(CMD55,0,0X01); //发送 CMD55
r1=SD_SendCmd(CMD41,0,0X01); //发送 ACMD41
if(r1《=1) //如果支持ADMD41指令,表示是V1.xx的卡
{
SD_Type=SD_TYPE_V1;
retry=0XFFFE;
do //等待退出 IDLE 模式,退出空闲状态,卡进入工作状态
{
SD_SendCmd(CMD55,0,0X01); //发送 CMD55
r1=SD_SendCmd(CMD41,0,0X01);//发送 CMD41
}while(r1&&retry--);
}else
{
SD_Type=SD_TYPE_MMC;//MMC V3,不支持ACMD41指令表示是MMC卡
retry=0XFFFE;
do //等待退出 IDLE 模式,退出空闲状态,卡进入工作状态
{
r1=SD_SendCmd(CMD1,0,0X01);//发送 CMD1
}while(r1&&retry--);
}
if(retry==0||SD_SendCmd(CMD16,512,0X01)!=0)SD_Type=SD_TYPE_ERR;
//错误的卡,如果是1.xx或MMC卡要设置块大小,为512字节,如果设置失败,定义卡错误
}
}
SD_DisSelect(); //取消片选
SD_SPI_SpeedHigh(); //高速,把SPI接口设置为高速,为36M,实际上stm32f1的SPI最高为18M,所以是超频使用,觉得不可接收的话可以把分频系数设置为4.设置为2也可以工作
if(SD_Type)return 0; //如果SD_Type有效,是正确的SD卡或MMC卡,表示初始化成功
else if(r1)return r1;
return 0xaa; //其他错误
}
2. 读卡函数 :u8 SD_ReadDisk(u8*buf,u32 sector,u8 cnt)
//从sd卡读取一个数据包的内容
//buf:数据缓存区
//len:要读取的数据长度。
//返回值:0,成功;其他,失败;
u8 SD_RecvData(u8*buf,u16 len)
{
if(SD_GetResponse(0xFE))return 1;//不停的读MISO,等待SD卡发回数据起始令牌0xFE
while(len--)//开始接收数据
{
*buf=SPI2_ReadWriteByte(0xFF);
buf++;
}
//下面是2个伪CRC(dummy CRC),多发16个时钟,把2个CRC移出来,然后不用
SD_SPI_ReadWriteByte(0xFF);
SD_SPI_ReadWriteByte(0xFF);
return 0;//读取成功
}
//读SD卡
//buf:数据缓存区
//sector:扇区 注意这里是扇区地址,不是字节地址
//cnt:扇区数,由于是u8类型,所以最多读255个扇区
//返回值:0,ok;其他,失败。
u8 SD_ReadDisk(u8*buf,u32 sector,u8 cnt)
{
u8 r1;
//先判断是不是SDHC卡,如果不是SDHC卡,先把扇区地址转换为字节地址,左移9位就是乘以512
if(SD_Type!=SD_TYPE_V2HC)sector 《《= 9;//转换为字节地址
if(cnt==1) //如果cnt是1,就是单个扇区的读写
{
r1=SD_SendCmd(CMD17,sector,0X01);//读命令
if(r1==0)//指令发送成功
{
r1=SD_RecvData(buf,512);//接收512个字节到buf中
}
}else
{
r1=SD_SendCmd(CMD18,sector,0X01);//连续读命令
do
{
r1=SD_RecvData(buf,512);//每次接收512个字节
buf+=512;
}while(--cnt && r1==0); //直到cnt为0
SD_SendCmd(CMD12,0,0X01); //发送停止命令
}
SD_DisSelect();//取消片选
return r1;//
}
3. 写SD卡函数:u8 SD_WriteDisk(u8*buf,u32 sector,u8 cnt)
//向sd卡写入一个数据包的内容 512字节
//buf:数据缓存区
//cmd:指令
//返回值:0,成功;其他,失败;
u8 SD_SendBlock(u8*buf,u8 cmd)
{
u16 t;
if(SD_WaitReady())return 1;//等待准备失效,等待MISO为高电平1.
SD_SPI_ReadWriteByte(cmd); //发送CMD的数据起始令牌0xFE
if(cmd!=0XFD)//不是结束指令
{
for(t=0;t《512;t++)SPI2_ReadWriteByte(buf[t]);//提高速度,减少函数传参时间
SD_SPI_ReadWriteByte(0xFF);//忽略crc
SD_SPI_ReadWriteByte(0xFF);
t=SD_SPI_ReadWriteByte(0xFF);//接收响应,SD卡在接收到512字节后有个响应
//(t&0x1F)=0x05表示响应正确
if((t&0x1F)!=0x05)return 2;//响应错误
}
return 0;//写入成功
}
//写SD卡
//buf:数据缓存区
//sector:起始扇区 ,这里注意是扇区地址,不是字节地址
//cnt:扇区数 ,由于是u8类型,所以最多读255个扇区
//返回值:0,ok;其他,失败。
u8 SD_WriteDisk(u8*buf,u32 sector,u8 cnt)
{
u8 r1;
if(SD_Type!=SD_TYPE_V2HC)sector *= 512;//转换为字节地址
if(cnt==1)
{
r1=SD_SendCmd(CMD24,sector,0X01);//读命令
if(r1==0)//指令发送成功
{
r1=SD_SendBlock(buf,0xFE);//写512个字节
}
}else
{
if(SD_Type!=SD_TYPE_MMC)
{
SD_SendCmd(CMD55,0,0X01);
SD_SendCmd(CMD23,cnt,0X01);//发送指令,如果不是MMC卡,先预先擦除要写入的扇区
//这样可以提高写入数据的速度
}
r1=SD_SendCmd(CMD25,sector,0X01);//连续写命令
if(r1==0)
{
do
{
r1=SD_SendBlock(buf,0xFC);//接收512个字节,多块写的令牌是0xFC
buf+=512;
}while(--cnt && r1==0);
r1=SD_SendBlock(0,0xFD);//发送多块写完成令牌0xFD,不带数据块
}
}
SD_DisSelect();//取消片选
return r1;//
}
4. 获取SD卡总扇区数的函数:u32 SD_GetSectorCount(void)
//获取SD卡的CSD信息,包括容量和速度信息
//输入:u8 *cid_data(存放CID的内存,至少16Byte)
//返回值:0:NO_ERR
// 1:错误
u8 SD_GetCSD(u8 *csd_data)
{
u8 r1;
r1=SD_SendCmd(CMD9,0,0x01);//发CMD9命令,读CSD,CSD寄存器为128位寄存器
if(r1==0)
{
r1=SD_RecvData(csd_data, 16);//接收16个字节的数据 即128位
}
SD_DisSelect();//取消片选
if(r1)return 1;
else return 0;
}
//获取SD卡的总扇区数(扇区数) ,扇区数*512就是容量
//返回值:0: 取容量出错
// 其他:SD卡的容量(扇区数/512字节)
//每扇区的字节数必为512,因为如果不是512,则初始化不能通过。
u32 SD_GetSectorCount(void)
{
u8 csd[16];
u32 Capacity;
u8 n;
u16 csize;
//取CSD信息,如果期间出错,返回0
if(SD_GetCSD(csd)!=0) return 0;
//如果为SDHC卡,按照下面方式计算
if((csd[0]&0xC0)==0x40) //V2.00的卡
{
csize = csd[9] + ((u16)csd[8] 《《 8) + 1;
Capacity = (u32)csize 《《 10;//得到扇区数
}else//V1.XX的卡
{
n = (csd[5] & 15) + ((csd[10] & 128) 》》 7) + ((csd[9] & 3) 《《 1) + 2;
csize = (csd[8] 》》 6) + ((u16)csd[7] 《《 2) + ((u16)(csd[6] & 3) 《《 10) + 1;
Capacity= (u32)csize 《《 (n - 9);//得到扇区数
}
return Capacity;
}











 工商网监
工商网监
评论