哪位大神
有基于dsp的
MPU6050开发程序,急用啊。。。
2013-08-31 14:46:11
请教:
MPU6050测得的角速度如何得到角加速度?
2017-10-17 15:39:15
MPU6050与
MPU9050的
区别
2015-09-25 20:53:04
MPU6050与IIC的爱恨情仇
2021-08-23 07:44:08
硬件MCU:STM32F405RGT6IMU:
MPU6050软件:开发环境:KEIL MDK-ARM uVision5
MPU6050使用DMP问题现象:
MPU6050设置
2022-02-10 06:41:19
前言
MPU6050具备中断寄存器,有助于精准获取数据。本文将使用STM32配置FIFO中断,并控制中断时间。如果对于
MPU6050还存在其他问题可参考另一篇文章。
MPU6050常见问题的
分析与处理
2022-02-10 06:37:21
2.4 STM32
MPU6050数据获取(IIC + DMP)本篇文章主要针对廉价的
MPU6050模块。我们这里完成了
MPU6050的数据获取、零偏自动设置、温漂抑制。这里提供源码工程文件,供大家
2021-08-09 07:17:09
MPU6050加速度传感器模块
2023-03-28 13:06:19
文章目录前言一、
MPU6050是什么?二、使用步骤1.引入库2.读入数据总结前言一、
MPU6050是什么?
MPU6050是一款性价比很高的陀螺仪,可以读取X Y Z 三轴角度,X Y Z 三轴加速度
2022-02-10 07:22:09
MPU6050简介什么是
MPU6050MPU6050的特点
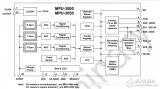
MPU6050框图
MPU6050初始化
MPU6050—DMP使用
介绍
MPU6050—DMP使用DMP驱动库驱动代码硬件连接
2022-02-10 07:02:46
外接
MPU6050代码教程一、准备好原子的教程二、硬件连接(注意AD0的连接3.3V,这样的话陀螺仪地址就可以变成0x69)三、代码修改1.2.3.然后直接烧录程序即可。四、效果显示1.刚开始一般会
2022-02-10 07:29:53
mpu6050简介:
MPU6000(
6050)为全球首例整合性6轴运动处理组件,相较于多组件方案,免除了组合陀螺仪与加速器时间轴之差的问题,减少了大量的封装空间。当连接到三轴磁强计
2022-02-11 07:46:16
一、
MPU6050简介1.什么是
MPU6050?
MPU6050是InvenSense公司推出的全球首款整合性6轴运动处理组件,内带3轴陀螺仪和3轴加速度传感器,并且含有一个第二IIC接口,可用
2021-08-09 07:25:57
MPU6050是什么?
MPU6050芯片的特点
有哪些?
2021-10-14 07:31:22
GY-521模块--
MPU6050芯片学习(一)一、模块
介绍二、
MPU6050MPU6050的特点:
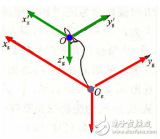
MPU6050检测轴示意图
MPU6050地址问题一、模块
介绍GY-521模块实物:GY-521
2022-02-10 07:19:53
MPU6000
MPU6050
MPU6500这三个芯片
有什么
区别?为什么看到有的帖子说
MPU6050比
MPU6500好?
2015-10-19 11:15:32
各位大神,我使用
mpu6050时遇到的一个问题,单独的驱动
mpu6050时可以输出正确的四元数,但是利用读出的数据控制两组电机旋转时输出的数据在几乎不变;折腾一番发现只有控制B组电机旋转时
MPU6050工作才会异常,但是两组电机的控制函数几乎一样啊,实在弄不懂是哪里出了问题
2017-07-28 12:00:08
做一款使用
mpu6050逇产品,不妙的是
mpu6050的零飘值太大了, 完全驾驭不了现在的算法,没有大神对
mpu6050零飘值
有更加深的见解,处理方式和独特的算法
2019-05-14 01:08:30
有大神知道
mpu6050不?
2015-06-11 21:18:37
incompatible or an
MPU3050."的问题,但是却可以读出
6050的地址0x68(AD0接地),论坛
有个老哥也遇到了这个问题,
2022-02-10 07:51:05
目录GY-521
MPU6050
介绍陀螺仪加速度计陀螺仪和加速度计的关系,姿态解算融合的原理硬件从机地址部分参考STM32—驱动六轴
MPU6050输出欧拉角GY-521
MPU6050
介绍关于
2022-02-10 07:45:15
2.4 STM32
MPU6050数据获取(IIC + DMP)本篇文章主要针对廉价的
MPU6050模块。我们这里完成了
MPU6050的数据获取、零偏自动设置、温漂抑制。这里提供源码工程文件,供大家
2022-02-10 06:01:07
够自己制作基于
MPU6050的控制系统,但由于缺乏专业知识而难以上手。此外,
MPU6050的数据是
有较大噪音的,若不进行滤波会对整个控制系统的精准确带来严重影响。
MPU6050芯片内自带了一个数
2021-01-28 09:52:28
关于
MPU6050前言简介首先,个人是通过野火的视频,
有专门
介绍
MPU6050的版块来做的了解。然后关于
MPU6050基本认识跟坐标系就不做阐述了
MPU6050主要是陀螺仪跟加速度计“:最直观的角度
2021-08-03 07:37:47
最近在实验
mpu6050,遇到2个问题。1、在初始化之后,读取
mpu6050的地址时,会出现地址为0的情况;2、第一次读取地址为0x68时,读取数据全为0,然后Reset后会出现一组数据。每隔1s
2016-08-09 09:32:59
#
MPU6050常见问题的
分析与处理本文主要针对STM32使用
MPU6050过程中产生的问题进行
分析和处理,部分内容也适用于其他单片机。本文基于
MPU6050自带的DMP算法。文章内容对于
MPU6050调试过程
有一定的帮助。
2022-02-10 07:23:19
请问下
mpu6050和
mpu6000什么
区别
2019-04-25 23:45:43
ADXL345只
有三轴加速度,
MPU6050整合加速度加陀螺仪,是不是选择
mpu6050更好?实际应用中二者各有什么优势?
2019-04-04 06:36:27
MPU6050陀螺仪使用( 原理图代码 )
2015-10-29 15:24:46
 91
91
MPU6050相关资料 源程序 原理图
2015-11-11 11:48:39
33
MPU6050资料,有关
MPU6050的
介绍。
2015-12-10 18:20:12
33
MPU6050程序,想了解、想要的小伙伴赶紧看看哦!
2015-12-15 13:51:58
37
mpu6050详细源码,配有电路图以及初始化C语言程序。详细的
mpu6050中文资料!
2016-02-18 11:53:20
98
MPU6050原理图,PDF格式,还蛮清晰。
2016-03-24 17:25:37
108
MPU6050用51单片机串口测试程序,通过1602显示数据
2016-04-28 14:57:09
32
MPU6050使用卡尔曼滤波的方法
介绍,使用卡尔曼滤波获得的姿态角更准确
2016-06-01 11:29:20
0
最新
MPU6050资料V5,包括上位机,PCB库,示例程序(PC版,STM32,Arduino版)
2016-06-22 16:28:28
26
本程序是基于
Mpu6050,所做的四元数结算 相当稳,希望对大家有所帮助
2016-08-17 10:36:55
90
自己整理的
MPU6050中文
介绍资料,感兴趣的小伙伴们可以瞧一瞧。
2016-10-14 14:17:18
635
四路dmp的
mpu6050的STM32F103程序
2017-02-28 21:08:10
13
MPU6050基于STM32,程序中加入
MPU的官方库DMP,计算出欧拉角,可在串口助手中观察欧拉角的变化
2017-03-01 12:48:37
59
MPU6050(硬件IIC)
MPU6050(硬件IIC)
2017-04-02 16:29:30
71
InvenSense公司的三轴陀螺仪
MPU6050测试程序。IIC接口,51单片机驱动,LCD1602同步显示。
2017-11-07 14:01:26
 5743
5743
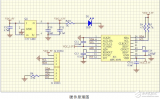
MPU6050模块,如图 1所示。该模块集成了一片
MPU6050芯片和一片STM8S003F3P6单片机,具有串口和I2C接口。
MPU6050中的DMP(数字运动处理器)对姿态进行融合,STM8
2017-11-07 14:06:41
14001
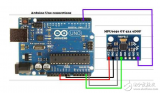
为避免纠缠于电路细节,我们直接使用集成的
MPU6050模块。
MPU6050的数据接口用的是I2C总线协议,因此我们需要Wire程序库的帮助来实现Arduino与
MPU6050之间的通信。请先确认你的Arduino编程环境中已安装Wire库。
2017-11-07 14:25:06
6954
介绍了
mpu6050姿态融合原理及程序代码
分析,
MPU6050是一款姿态传感器。主要
介绍三种姿态融合算法:四元数法、一阶互补算法和卡尔曼滤波算法。
2017-12-11 13:31:40
71161
本文主要
介绍了
mpu6050姿态解算原理
分析及程序设计,
MPU6050硬件DMP解算姿态是非常简单的,四元数法只求解四个未知量的线性微分方程组,计算量小,易于操作,是比较实用的工程方法。
2017-12-11 13:51:34
41795

本文主要
分析了三轴陀螺仪
MPU3050驱动程序,
MPU3050通过i2c来控制中断,获取xGyro,yGyro,zGyro。三轴陀螺仪最大的作用就是“测量角速度,以判别物体的运动状态。
2017-12-11 14:45:54
6720
本文主要
介绍了
mpu6050对应i2c地址是什么,并通过stm32的硬件读取
mpu6050的数据。
MPU6050的 I2C 地址是 0xD0H(11010000B)。I2C从器件有8位的地址,前7位由 WHO AM I确定,第8位由AD0的电平决定。
2017-12-11 16:04:16
23368

本文开始
介绍了
mpu6500的定义与
MPU6500驱动总结,其次阐述了
mpu6050的定义与
mpu6050感测范围,最后
介绍了
mpu6500和
mpu6050的
区别。
2018-03-08 09:54:02
89691
本文开始对
mpu9150进行了
介绍,其次
介绍了
mpu6050的定义、
mpu6050感测范围以及
mpu6050的特征,最后阐述了
mpu9150和
mpu6050
区别。
2018-03-08 10:07:11
41146
本文开始
介绍了
mpu6050的定义和
mpu6050的感测范围,其次阐述了
mpu6050特征,最后
介绍了
mpu6050与单片机的连接方法。
2018-03-09 08:42:33
25818
本文开始阐述了卡尔曼滤波的概念,其次阐述了卡尔曼滤波的性质与卡尔曼滤波的应用,最后
介绍了
mpu6050卡尔曼滤波
分析及
mpu6050卡尔曼滤波输出姿态角程序。
2018-03-09 08:57:31
71467

mpu6050常用作提供飞控运行时的姿态测量和计算。本文首先
介绍了
MPU6050姿态解算的原理,其次详细的
介绍了
mpu6050姿态解算程序。
2018-03-09 09:15:24
41957
MPU6050使用说明书下载
2018-04-14 11:41:22
17
本文档的主要内容详细
介绍的是串口
MPU6050卡尔曼滤波6轴9轴资料合集免费下载包括了:
MPU-6050寄存器映射,
MPU-6000和
MPU-6050产品规范,串口
MPU6050封装库,串口
MPU6050原理库,MiniIMU上位机软件,论坛资料,指令校准法。
2019-05-20 08:00:00
40
一直想自己做个四轴飞行器,却无从下手,终于狠下决心,拿出尘封已久的
MPU6050模块,开始摸索着数据手册
分析,一步一步地实现了
MPU6050模块的功能,从
MPU6050模块中读取出加速度值和陀螺仪采样值。
2019-06-30 10:17:09
6689
最近,被安排调试
MPU6050模块,之前从没接触过相关MEMS 传感器, 所以感觉一头雾水。幸好还有网络, 还有强大的兄弟团的支持。不过, 很可惜,网上大部分资料只是简单教你如何配置
MPU6050
2019-07-24 16:27:07
32
最近接触
MPU6050,下面对
6050初始化配置做一点总结,如有错误还望不吝赐教在初始化
MPU6050前,先确定单片机与
MPU6050通信是否正常, 根据手册
MPU6050采用的是400kbit/s 的IIC。
2019-08-01 16:55:35
88
本文档的主要内容详细
介绍的是
MPU6050传感器的四元数欧拉角程序免费下载。
2019-08-30 17:29:53
23
本文档的主要内容详细
介绍的是
MPU6050的DMP6.1官方库免费下载。
2020-05-08 08:00:00
209
本文档的主要内容详细
介绍的是
MPU6050传感器的电路原理图免费下载。
2020-05-29 08:00:00
37
MPU6050专用稳压模块的原理图设计
2021-11-07 19:21:00
37
MPU6050开发 -- 数据
分析
2021-11-30 11:21:04
22
@TOCMPU
6050+STM32学习笔记学习了差不多两天的
mpu6050,参考了很多篇博客还有看一些资料,今晚终于把这个东西在我的串口显示出来了,下面就废话不多说,开始我的笔记啦。开发环境:uv5
2021-12-06 11:36:10
9
MPU6050地址先说结论器件本身的地址为Addr=0x68or0x69Addr = 0x68 \quad or \quad 0x69Addr=0x68or0x69但是用在IIC的7位寻址时,写数据
2021-12-06 11:36:10
7
MPU6050简介什么是
MPU6050MPU6050的特点
MPU6050框图
MPU6050初始化
MPU6050—DMP使用
介绍
MPU6050—DMP使用DMP驱动库驱动代码硬件连接
2021-12-06 11:51:11
67
1、首先把正点原子
MPU6050例程文件夹下 HARDWARE/
MPU6050这个文件夹整个拷贝到我们的工程文件夹里面。2、把里面所有的.c文件都加入我们的工程里面,记得添加头文件路径3、进入
2021-12-06 11:51:11
15
MPU6050断电保持原角度心得 基于正点原子
mpu6050例程所改写 首先要更改两点 第一点:inv_
mpu.c中改写第2885行,如图第二点:inv_
mpu.c中改写第2978行,如图改写
2021-12-06 11:51:11
16
移植正点原子
mpu6050代码,总是
MPU6050初始化失败解决首先观察正点原子
MPU6050代码,发现它在读取
MPU6050数据的同时,还将数据通过串口发送给上位机进行调试,而我们移植
2021-12-06 11:51:12
38
#
MPU6050常见问题的
分析与处理本文主要针对STM32使用
MPU6050过程中产生的问题进行
分析和处理,部分内容也适用于其他单片机。本文基于
MPU6050自带的DMP算法。文章内容对于
MPU6050调试过程有一定的帮助。
2021-12-06 12:21:06
41
文章目录引言简述一下
mpu6050和stm32的一些坑吧
MPU6050I2C读写
MPU6050初始化读取内部温度传感器读取陀螺仪DMP的移植读取三轴角度引言最近玩了IMU模块,看了很多的博客
2021-12-06 12:36:07
14
前言
MPU6050具备中断寄存器,有助于精准获取数据。本文将使用STM32配置FIFO中断,并控制中断时间。如果对于
MPU6050还存在其他问题可参考另一篇文章。
MPU6050常见问题的
分析与处理
2021-12-06 12:36:07
14
介绍一个学长做的单片机项目教程:
MPU6050姿态解算大家可用于 课程设计 或 毕业设计技术解答毕设帮助:<Q>7468760412
MPU6050MPU6050是一种非常流行的空间运动传感器芯片,可以获取器件当前的三个加速度分量和三个旋转角速度。由于其体积小巧,功能强大,
2021-12-06 12:51:10
13
STM32获取
MPU6050数据
2021-12-06 13:06:16
48
MPU6050姿态融合解算(DMP)
2021-12-06 13:21:10
37
浅谈自己使用
mpu陀螺仪的一些心得。
mpu6050/
mpu6500驱动这里是用的原子哥的用虚拟IIC驱动
mpu6050代码,之前我一直是用硬件IIC驱动,但是听大神说虚拟IIC比硬件IIC要稳定
2021-12-06 13:21:10
49
此文为个人学习总结,方便回顾。1、
MPU6050,dmp初始化失败。u8
mpu_dmp_init(void){ u8 res=0;
MPU_IIC_Init(); //初始化IIC总线
2021-12-06 13:21:11
9
关于
MPU6050学习的一些总结之二IIC协议前言一、IIC总线前言在查阅并了解了
MPU6050的芯片手册后,已经对
MPU6050有了大致的了解。那么接下来如何使
MPU6050工作并且读取内部寄存器
2021-12-06 13:21:11
2
文章目录1、I2C总线1.1 I2C总线协议1.2 I2C总线读写操作1.3 STM32F0-I2C控制器特征2、
MPU6050MPU6050的特性参数
MPU6050的寄存器
介绍
MPU6050的设备
2021-12-06 14:06:08
25
STM32
MPU6050平衡车
2021-12-06 14:51:10
61
MPU6050应用得越来越普遍,如何移植DMP库网上讲解的大多数是如何从
MPU6050官方例程移植到STM32,很少有移植到别处的案例。本文
介绍如何从STM32移植到CC2640R2F。首先确认需要
2021-12-06 14:51:11
14
MPU6050( )
2021-12-06 15:06:11
23
mpu6050的移植普通io口移植 :1.寄存器配置更改注意:a…超过7 CRL --> CRH 然后重新计数76543210–>15 14 13 12 11
2021-12-06 15:51:08
4
基于Stm32CubeMX下
Mpu6050模拟IIC的Dmp的移植一、问题背景以前熟悉的是在标准库下移植
Mpu6050的DMP,获取航向角等等。现在要HAL库下移植
MPU6050的DMP库。先
分析
2021-12-06 16:06:10
23
MPU6050的DMP自检与姿态换算的问题
2021-12-06 16:51:11
16
MPU6050数据手册,规格说明
2022-03-09 15:03:54
92
德赢Vwin官网 网站提供《使用
MPU6050、ESP8266和Qubitro进行ART
分析.zip》资料免费下载
2022-10-28 09:33:33
2
方案
介绍最灵敏的地震仪一般由电子传感器制成,在这种情况下通常使用的是
MPU6050模块。该地震仪的核心是
MPU-6050传感器,在单个芯片中包含一个 3 轴 MEMS 加速度计
2022-12-14 17:28:19
2
德赢Vwin官网 网站提供《使用
MPU6050平衡LED项目.zip》资料免费下载
2023-02-08 15:34:05
5
德赢Vwin官网 网站提供《
MPU6050教程开源分享.zip》资料免费下载
2023-06-25 15:18:14
6
mpu6050模块
介绍
2023-11-30 09:17:28
0
MPU6050和
MPU6500都是InvenSense公司生产的高性能六轴陀螺仪和加速度计传感器。它们被广泛应用于各种领域,如移动设备、虚拟现实、机器人、汽车等。虽然它们之间有一些
区别,但是无法简单
2023-12-21 16:54:00
1769
ADXL345和
MPU6050是两种常见的加速度计和陀螺仪传感器,用于测量物体的加速度和旋转速度。它们在设计、性能和应用方面有一些
区别。在本文中,我们将对ADXL345和
MPU6050的
区别进行详细
2024-01-04 11:30:38
1380
 德赢Vwin官网 App
德赢Vwin官网 App









 工商网监
工商网监
评论