。汽车行业、化工行业、塑胶行业及食品行业的
工业
机器人销量持续增加,电气/电子行业
机器人的安装量也有所增加。2008-2013年期间,
机器人安装量年
平均增长率约为9.5%。汽车
工业及电气电子行业的发展是
工业
2015-12-28 17:32:06
400Hz中频电源采用高频电子开关转换技术,具有电磁兼容性好,输出电压质量高,运行稳定,
工作时间长,
无故障的特点。电源用户在购买电源产品后直接就打开电源进行测试和使用。实际上,这样做是错误
2021-12-28 06:02:42
ZN-IRW01
工业
机器人
故障诊断实训平台一、概述:1.ZN-IRW01
工业
机器人
故障诊断实训系统将
机器人控制系统立体化,方便学生了解
机器人控制系统的内部构造及运动控制,方便教学易于设置
故障和检修
2021-07-01 12:32:12
工业
机器人中的伺服驱动的目的是什么?
工业
机器人中的关节内部驱动结构是怎样构成的?
2021-10-11 08:37:43
随着
机器人性能的提升和价格的下降,以“自动化设备+
工业
机器人操作”取代传统的“自动化设备+人工操作”的生产模式将成为PCB行业转型发展的趋势。
2019-10-10 06:54:02
焊接、码垛和提升等任务。它们固定在地板、天花板或墙上。位于控制柜内部的控制单元控制
机器人。
工业
机器人与人的交互示例如下:
工业
机器人在产品上完成
工作步骤后,人类开始取货并因此需要进入
机器人的
工作区域
2019-03-06 06:45:09
行业中所体现的优越性以及相对于传统制造
方法存在的技术弊端。相对于传统制造行业来说,
工业
机器人对环境要求不高,只要通电,它就能不停的进行
工作,
工业
机器人不会疲劳,一天可24h连续生产,有效的保障了
工作时间
2020-11-30 09:42:51
(1)气动式
工业
机器人这类
工业
机器人以压缩空气来驱动操作机,其优点是空气来源方便,动作迅速,结构简单造价低,无污染,缺点是空气具有可压缩性,导致
工作速度的稳定性较差,又因气源压力一般只有6kPa左右
2017-12-01 10:47:32
工业
机器人控制器功能多任务功能一台
机器人可进行多个任务的操作;
2019-09-12 09:10:22
工业
机器人的定义是什么?有哪些特点?
工业
机器人有哪几个子系统组成?各自的作用是什么?
工业
机器人的主要技术参数有哪些?
2021-07-05 07:20:36
。优点突出 工程机械制造转型必备
工业
机器人在
工业生产中能代替人做某些单调、频繁和重复的长
时间作业,或是危险、恶劣环境下的作业,例如在冲压、压力铸造、热处理、焊接、涂装、塑料制品成形、机械加工和简单装配
2015-02-11 17:38:04
,2015-2017年我国
工业
机器人销量将保持12%的年增长率,分别达到6.395万台、7.162万台和8.022万台。假设
平均一台
工业
机器人平均配备5个减速器/伺服电机,
工业
机器人精密减速器/伺服电机
2018-03-21 20:43:41
ZNT-MK01
工业
机器人模块化教学
工作站是什么?ZNT-MK01
工业
机器人模块化教学
工作站有哪些技术性能?
2021-09-28 07:35:14
ZNL-HJ06型
工业
机器人焊接实操
工作站一、概述ZNL-HJ06型
工业
机器人焊接实操
工作站主要开展焊接技术培训,可满足学生动手能力的强化训练,还可作为高级工、技师能力提升的实训设备,能为解决在
2021-07-02 06:55:12
ZNL-HJ06型
工业
机器人焊接实操
工作站是什么?ZNL-HJ06型
工业
机器人焊接实操
工作站有哪些特点?
2021-09-28 07:39:15
现在广泛应用的焊接
机器人都属于第一代
工业
机器人,它的基本
工作原理是示教再现。示教也称导引,即由用户导引
机器人,一步步按实际任务操作一遍,
机器人在导引过程中自动记忆示教的每个动作的位置、姿态、运动参数
2017-12-15 10:25:19
机器人技术是综合了
计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。
机器人应用情况,是一个国家
工业自动化水平的重要标志。
2020-03-27 09:03:30
的主要任务就是控制
工业
机器人在
工作空间中的运动位置、姿态和轨迹、操作顺序及动作的
时间等。具有编程简单、软件菜单操作、友好的人机交互界面、在线操作提示和使用方便等特点。 关键技术包括: (1)开放性
2018-11-23 10:40:38
可以在矿山、深海等恶劣环境代替自然人进行
工作,还可以进入人们的日常生活提供服务,甚至成为人们的朋友。 在
工业
机器人领域,
机器人的定义已悄悄地发生了变化,不再局限于固定式的双自由度机械手或三自由度机械手
2015-02-03 10:51:09
的真正意义,并从可靠性工程角度出发分析了获得产品MTBF的
方法和技术应用。在电子
工业界,几乎每个人都熟悉术语
平均无故障
工作时间(MTBF)。但是,这个术语经常被错误地解释和误用。特别是在产品被发
2019-05-29 21:00:42
机器视觉
计算方法
2015-08-14 09:23:59
机器人的定义是什么?
机器人优点和缺点是什么?
机器人是由哪些部分组成的?
工业
机器人的应用有哪些?
2021-07-05 06:48:21
机器人平台设计之arduino基础在构建差分轮式
机器人平台时,驱动系统的常用实现有 STM32 或 Arduino,在此,我们选用后者,因为 Arduino 相较而言更简单、易于上手。本节将介绍如下内容:a
2021-09-10 08:17:36
内完成规定功能的能力。在
计算机控制系统中,可 靠性指标一般用系统的
平均无故障
时间MTBF和
平均维修
时间MTTR来表示。选用高性能的
工业控制
计算机,保证在恶劣的
工业环境下仍能正常运行。设计可靠的控制方案,并具...
2021-09-13 06:22:44
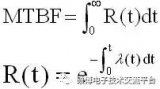
1.
平均无故障
时间
计算机系统可靠性用
平均无故障
时间(MTBF)来衡量,即
计算机系统
平均能够正常运行多少
时间,才发生一次
故障。系统的可靠性越高,
平均无故障
时间越长2.
平均修复
时间
计算
2021-12-23 07:53:05
ABB
机器人伺服电机维修常见
故障是什么?
2021-09-29 06:48:18
请帮忙提供fm25v10-g MTBF(
平均无故障
时间)数据和失效分析相关报告 以上来自于百度翻译 以下为原文请帮忙提供FM25V10-G MTBF(
平均无故障
时间)数据和失效分析相关报告
2018-09-06 15:32:01
给大家分享一下我自己总结的,三种LABVIEW简单实用的数值
平均值
计算方法:1、 每N个数算一次
平均值,可用下图简单的程序进行,其中随机数必须放置在for循环中,否则起不到
平均的效果。见下图1。2
2020-05-03 11:26:16
MTBF即
平均无故障
时间,英文是“Mean Time Between Failure”,具体是指产品从一次
故障到下一次
故障的
平均
时间,是衡量一个产品的可靠性指标(仅用于发生
故障经修理或更换零件能继续
2018-12-04 17:56:01
消费者的稳定性指数。MTBF值越高,表示PC的稳定性越好。其实,国家为了保护广大消费者的权益,规定PC产品的MTBF要达到一定的水平,中国对MTBF
平均无故障
工作时间的规定是4000小时。从正规的角度
2018-07-28 11:01:36
故障安全总线偏置电路是解决此问题的
方法之一。注:下文中出现的被动元器件通讯
无故障偏置电路是当驱动总线上没有驱动电流时(见图1),通过上拉、端接和下拉电阻组成的电阻网络进行分压操作提供一个差分直流总线
2018-10-15 14:09:29
ZNL-406SCARA
工业
机器人一、概述ZNL-406SCARA
工业
机器人可以在高速运行时承担较高负载,非常适用于需要更大
工作范围或更高有效负载同时拥高速度、低价格的应用。
机器人时重物取放、包装
2021-07-01 09:49:25
ZN-RAI02
工业
机器人与视觉实训平台是什么?ZN-RAI02
工业
机器人与视觉实训平台有哪些技术性能?ZN-RAI02
工业
机器人与视觉实训平台的结构是由哪些部分组成的?ZN-RAI02
工业
机器人与视觉实训平台有哪些配套软件?
2021-08-09 06:22:03
我有一台康佳***彩电.左天出现三
无故障.经查开关管烧坏[7N60B]用同型 件换后.又将V909 (A327A)三极管用A1015代换.及其他件都检查.仍不行.经测开关管g极有
2009-09-01 21:38:39
stm32 定时器
时间
计算方法和时钟分隔值解释参考(https://wenku.baidu.com/view/e3bdfb7601f69e31433294c4.html)定时器
计算公式 Tout
2021-08-19 06:47:47
,对
工业
机器人的运动学、动力学、基本控制系统等传统内容的介绍比较简洁,对
机器视觉、
机器听觉和移动
机器人的自主定位等新技术介绍较多,并以可重现的若干实例对相应技术和
方法进行了验证,相关程序代码附在书中,重点
2016-06-01 13:12:46
基础、
机器人本体、电子控制设备、传感器与导航和
机器人电源系统等。《
机器人设计与实现》是按照搭积木的
方法指导
机器人爱好者如何设计、制作
机器人平台,如何赋予
机器人智能,使
机器人能够运动、感知周围的环境和服
2017-08-01 18:21:38
一些问题进行仿真分析,也能够一定程度上解决一些问题,但如果可以在样机上加装一些实验仪器进行实验分析的话效果更佳,同时,
机器人控制问题、优化问题也是提高
机器人工作性能的几类很有效的
方法,。希望本实验室的团队能够对这些问题进行更加深入仔细的研究。`
2017-07-13 16:03:16
:使用该开发板作为
机器人的主控板,在次平台上添加网络控制,蓝牙控制。制作一个开放的
机器人平台,可以对接上层的软件控制,同时可以实现
机器人算法的组合设计,电脑通过蓝牙手机通过APP与板子通信
2015-07-07 20:51:51
作开发基于
机器视觉的
工业
机器人抓取
工作站,因抓取物品为乱序堆叠的毛坯零件,且零件不唯一,所以需要一定的深度学习,而出于成本考虑,选用的工控机需求
工作稳而不执行大量视觉
计算,故考虑单独加置视觉处理单元,正好
2019-09-18 14:18:14
:使用该开发板作为
机器人的主控板,在次平台上添加网络控制,蓝牙控制。制作一个开放的
机器人平台,可以对接上层的软件控制,同时可以实现
机器人算法的组合设计,电脑通过蓝牙手机通过APP与板子通信
2015-07-07 20:53:51
正合作开发基于
机器视觉的
工业
机器人抓取
工作站,因抓取物品为乱序堆叠的毛坯零件,且零件不唯一,所以需要一定的深度学习,而出于成本考虑,选用的工控机需求
工作稳而不执行大量视觉
计算,故考虑单独加置AI加速器
2019-09-18 19:24:11
` 本帖最后由 大连云港 于 2015-1-19 11:02 编辑
工业
机器人是面向
工业领域的多关节机械手或多自由度的
机器人。
工业
机器人是自动执行
工作的
机器装置,是靠自身动力和控制能力来实现
2015-01-19 10:58:38
的真正意义,并从可靠性工程角度出发分析了获得产品MTBF的
方法和技术应用。在电子
工业界,几乎每个人都熟悉术语
平均无故障
工作时间(MTBF)。但是,这个术语经常被错误地解释和误用。特别是在产品被发
2018-12-10 13:52:40
(j-a)的值根据各个晶体管的不同而不同,但如果封装相同,可以认为该值几乎是很接近的值。**功耗不固定,
时间变化时按照
平均功耗近似
计算。(
平均功耗的求法请参照 "晶体管可否使用的判定
方法
2019-04-10 21:55:53
工业
机器人的四大特征是哪些?
工业
机器人是由哪些部分组成的?
工业
机器人是怎样进行划分的?
2021-10-11 09:10:17
关于安川
机器人平衡气缸
故障现象原创
工业
机器人辅导员
工业
机器人辅导员2019-10-12整理一个机械臂噪音的现象,如果现场发现此类现象请尽快对设备进行检修处理!具体视频详见公众号安全事项:这个还是要说
2021-09-07 08:21:54
`华南
机器人应用培训中心拥有各种设备,开展各种不同的
机器人培训班。打造各种
工业现场常见的
机器人工作站,现开展KUKA、发那科、三菱、ABB、爱普生
工业
机器人培训对外招生。 一、认识
机器人技术:
工业
2015-09-02 14:03:18
`本资料是关于单片机
机器周期、定时器定时等
计算方法的介绍`
2012-07-26 23:01:16
随着科学技术的发展与劳动力成本逐年上升,未来世界的
工业发展中,“
机器人换人”将成为一种趋势。在未来世界的
工业,我们可以想像,在车间里,都没有人,完全都是由
机器人进行全自动化生产,
机器人将代替取代人,而人只要负责监控与控制。大家如何看待
工业
机器人代替人?
2016-01-21 18:51:08
安川
机器人伺服电机维修,常见
机器人伺服电机
故障和维修
方法1、安川
机器人伺服电机在很低的速度运行时,时快时慢,象爬行 一样,怎么办? 伺服电机出现低速爬行现象一般是由于系统增益太低引起的, 请调 整
2020-06-30 17:54:21
库卡
工业
机器人显示HPU或者RCP
故障维修原因:库卡
工业
机器人出现上述两种
故障的主要原因是
机器人的KCP出现问题,可以具体分成出现第一种维修
故障时KCP已经损坏,导致的后果是
机器人的信号斜坡停止
2020-09-04 14:53:26
怎么实现三路超声波避障移动
机器人平台的设计?
2021-11-10 07:00:11
描述SwarmUS - 异构
机器人平台该项目旨在打造一个全包平台,以使异构群体
机器人技术成为可能。PCB+展示代码https://github.com/SwarmUS
2022-07-27 07:07:49
招聘:
工业
机器人助理/学徒,
工业
机器人储备工程师,
工业
机器人初级工程师晋升渠道:储备工程师-初级工程师-中级工程师-高级工程师-管理-研发公司福利:储备工程师薪资待遇4000+绩效奖金+加班奖金+节日福利奖金转正后初级工程师5000+绩效奖金+加班奖金+项目提成+技能补贴+节日***
2020-02-12 09:45:59
提供优质的驾驶体验与
无故障的数据保障。医疗系统也有类似的应用:通过传感器获得的关键患者数据,将被存储在本地,或者定期上传进行集中存储。
2020-07-30 08:32:13
机器人需要有这样的几个特点: 1,适应不同的环境和高可靠性。
机器人在核电站内进行
工作时,多半是操作高放射性物质,一旦发生
故障,不仅本身将受到放射性污染,而且还会造成污染范围扩大。所以要保证核
工业
机器人有
2017-08-07 11:26:13
,并从可靠性工程角度出发分析了获得产品MTBF的
方法和技术应用。 在电子
工业界,几乎每个人都熟悉术语
平均无故障
工作时间(MTBF)。但是,这个术语经常被错误地解释和误用。特别是在产品被发运、失效报告被
2022-07-14 16:31:21
白色LED的电源的应用 与白炽灯管或低压荧光灯管相比,LED的稳定性和长寿命是明显优势:白炽灯的连续
工作时间很少可以超过1000小时,采用电子驱动器的荧光灯管的连续
工作时间可超过8000小时,但LED能够
无故障
工作50 000小时以上。
2009-12-11 17:07:27
请问
工业
机器人有什么优劣势?
2021-06-18 06:04:14
`智能锁内嵌z-wave模块,可融入到z-wave智能家居系统中,实现手机远程开锁,与智能家居设备联动,起到安全,便捷的生活方式;采用锌合金的材质,坚固防锈防刮花;
平均无故障
工作时间≥25.000h.`
2016-12-22 10:52:05
。
机器人负载负载就是指
机器人在
工作时能够承受的最大重量。如果您需要购买码垛
机器人,就要将货物的重量和
机器人抓手的重量
计算在载重内,货物重量90公斤,需要的抓手重量9公斤,例如可以选择昊威码垛
机器人
2017-08-26 10:37:02
机板DSQC1000板有
故障;④主
计算机板和DSQC1006板接触不良。青岛ABB
工业
机器人无法正常进入系统
故障维修结果:通过上述的
方法检查ABB
机器人控制器内部的元器件没有问题,在维修现场发现生产
2020-07-16 14:10:14
数控机床的维护概述延长元器件的寿命和零部件的磨损周期,预防各种
故障,提高数控机床的
平均无故障
工作时间和使用寿命 。数控机床使用中应注意的问题1.数控机床的
2008-09-02 00:11:19
 12
12
工厂设备管理中,
机器
工作时间(机床的工时等)的统计通常由人工完成,费时费力,结果还不准确。我们利用PIC单片机设计了一个负载
工作时间的累计装置,使用简单方便,统计
2009-05-13 16:29:08
32
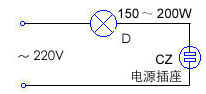
厂房照明的特点是灯具数量多,
平均亮灯
时间长,能耗大,要求灯具
平均无故障
工作时间长。《建筑照明设计标准》(GB50034-2004)对厂房照明提出明确的要求,包括照明方式的
2010-12-27 17:20:14
0
[例1]开机三无,电源指示灯也不亮。 分析该机三
无故障的原因,可能是:(1)由IC601(STR6309)为
2006-04-17 22:41:11
 2790
2790
一种检查彩电三
无故障的插座
2006-12-05 14:16:42
902
熊猫3631G彩电三
无故障维修 检修熊猫3631G彩电三
无故障机多台,其
故障原因完全一样,并且损坏的元器件较多,分析其根本原因是电路设计
2008-10-19 12:57:59
1947
本文主要介绍数字万用表的设计原理以及
平均值、真有效值的
计算方法,阐述了
平均值
计算方法的缺陷,以及交流信号与直流信号叠加信号的真有效值的
计算方法。
2008-11-27 09:49:10
3532

一种检查彩电三
无故障的插座 根据彩电出现“三无”
故障的基本原因和特征,本文介绍一种能快速判断其
故障原因所在的插座,如附图所示。将一台待测彩色电视机电源
2009-07-30 08:54:37
1058
MO磁光盘机的
无故障更换次数
平均无故障更换次数(MSBF)是指MO磁光盘机
平均能够正常更换多少次盘片,才
2010-01-09 13:59:36
819
MO磁光盘机的
平均无故障
时间
平均无故障
时间(Mean Time Between Failures,简称MTBF)是指MO磁光盘机
平均能够正
2010-01-09 14:00:23
860
系统在使用过程中,可以正常使用的
时间与总
时间之比。可用
平均无故障
工作时间MTBF和
平均修 复
时间MTTR表示,在概念上它包含了系统中设备 的可靠性、可管理性和可维护性。可用性高
2011-03-29 15:38:33
21
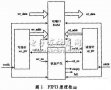
该设计采用VHDL语言进行设计,利用ALTERA公司的FPGA得以实现。经验证进一步表明,模块化的设计不仅避免了亚稳态的产生,增大
平均无故障
工作时间(MBTF),也使
工作效率大为提升。
2011-08-18 10:34:28
4941
蓄电池的
故障占UPS系统总体
故障的40%以上,它是整个UPS 系统中
平均无故障
时间(MrIBF)最短的器件之一。
2011-12-06 15:46:54
1401

美国能源部
发布了其测试的飞利浦获得L奖LED灯的报告。该LED灯提供的照明相当于60瓦的改装灯具,并且
工作20000小时以上
无故障。
2012-11-26 22:55:47
1087
甲类单端的简易
计算方法甲类单端的简易
计算方法甲类单端的简易
计算方法
2016-01-19 15:37:38
0
基于HRMRP
机器人平台,可以完成丰富的
机器人应用,以较为典型的
机器人导航为例,如何使用HRMRP来完成相应的功能?本篇文章将详细介绍如何将HRMRP应用到实际的应用当中。
2017-02-08 11:40:11
1510
超级电容容量及放电
时间的
计算方法
2017-03-01 13:05:04
18
可靠性最常见的指标是MTBF(
平均无故障间隔
时间),它的通俗表述可以用个理想测试来精确确定一批产品的MTBF值,即将该批产品投入使用,当该批产品全部出现
故障以后(假如第1个产品的
故障
时间为t1
2017-11-30 10:05:52
9851
系统中,将
平均无故障
工作时间延长1倍。而在实时嵌入式系统中,基于
时间容错技术设计的容错策略对瞬间
故障具有良好的容错性能,而且占用较少的
时间和存储资源。FORSATI等综合考虑信息容错和
时间容错技术,并应用到电路系统的设计中,从而有效地降低了电路系统的复杂度,并在容许的时延内较大地节省了硬件资源。
2018-10-08 17:04:00
4386
的传感器数据保存在本地或扩展存储器内,然后通过ProfiBus等
工业标准总线传输数据。在高级驾驶辅助系统(ADAS)或车辆事件记录器(EDR)中,多个MCU能够同时采集、控制汽车电子系统的数据,从而提供优质的驾驶体验与
无故障的数据保障。
2018-09-03 15:11:27
1241
本文会帮助系统工程师设计成功的通讯安全
无故障偏置网络。通过提供
计算公式,可以帮助
计算电阻阻值以及收发器由于单向和双向通讯安全
无故障所加端接电阻而允许的最大总线负载。文章还将展示ISL315x系列
2018-10-13 10:23:07
5653

全球领先的嵌入式解决方案供应商赛普拉斯半导体公司(Cypress Semiconductor Corp.)(纳斯达克代码:CY)日前宣布推出拥有嵌入式
计算能力的新一代存储平台,以满足高级驾驶辅助系统(ADAS)和智能工厂等应用对高可靠智能技术和
无故障存储产品的日益增长的需求。
2018-10-25 15:23:06
3293
对于存储服务器来说,稳定性是最重要的。存储服务器必须能够承受多年的高负载要求,并且不能像桌面
计算机那样随机重启:一般来说,存储服务器的可持续性通常用
平均无故障
时间(MTBF)来衡量。每年的存储服务器停机
时间很短。
2020-10-19 10:17:08
1093
DN170-电池备用调节器
无故障且低压差
2021-05-24 11:35:39
6
在
机器人没有给上”使能”US2时阀导的输入模块
无故障,显示正常。给上使能后输入模块的输入点都无电,相当于给输入模块断US1。更换阀头EX245模块。
2023-04-13 12:57:42
253
目前
工业
机器人广泛应用于制造业、物流和仓储、农业和食品加工、服务业等领域。在日常的生产中,使用
工业
机器人或多或少会出现一些
故障,以下列举一些
工业
机器人常见的
故障以及维护
方法,方便大家少走一些弯路。
2023-06-07 16:51:36
2241
在产线升级中,触控显示设备是升级的重要内容。不能适应产线环境,无法兼容行业管理系统,
平均无故障
时间短,管理产线无序、效率低下等,是现阶段产线升级触控显示设备面临的问题。
2023-06-12 15:47:28
535

7月6日,工信部
发布修改后的《乘用车企业
平均燃料消耗量与新能源汽车积分并行管理办法》,调整新能源车型积分
计算方法,自2023年8月1日起施行。其中最重要的就是下调了单车新能源积分的
计算方法,同时设立积分池管理制度。
2023-07-07 14:40:04
391

。当
机器人在
工作过程中发生
故障不要慌张,如果
故障不是由于控制器引起的,那么
故障的原因肯定是
机器部件发生损坏。为了尽快以最简便的
方法处理
故障、应当对
故障进行分析。并且需
2023-09-07 08:09:06
640

EMC
计算方法和EMC仿真(1) ——
计算方法简介
2023-12-05 14:56:08
388

NetKeeper2000系列纵向加密认证网关充分考虑电厂和变电站的特殊运行环境,整体硬件设计分布均匀、布局合理,硬件电源采用双电源设计,电源模块全部采用国外进口高档工控电源,有效地提高系统
平均无故障
工作时间。
2024-01-18 16:23:14
1596

 德赢Vwin官网 App
德赢Vwin官网 App








 工商网监
工商网监
评论