SLAM作为一种基础技术,从最早的军事用途(核潜艇海底定位就有了
SLAM的雏形)到今天,已经逐步走入人们的视野,过去几年扫地机器人的盛行让它名声大噪,近期基于三维
视觉的VSLAM又让它越来越显主流。
2018-08-08 10:07:28
 9779
9779
SLAM系统分为建图、定位和导航三部分,建图算法使用Google Cartographer 2D建图,这是Google在2016年
开源的一套商业建图算法,稳定性和精度相对较高。
2022-07-01 13:02:02
2171
在无人机
视觉系统的常规研究中,用于基于
视觉的导航的
视觉同步定位和映射(Visual
SLAM)和
视觉里程计(VO)是主要课题。
2022-07-28 11:21:42
1112
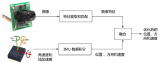
提出了一种使用低成本无人机实时生成探索地图的解决
方案。这依赖于Tello Edu无人机提供的信息,该无人机将图像流式传输到外部笔记本电脑上以进行实时处理。该解决
方案运行单目
视觉
SLAM来注册图像并创建未缩放的环境地图。
2022-08-29 16:02:57
1333
本文提出了一个鲁棒且快速的多模态语义
SLAM框架,旨在解决复杂和动态环境中的
SLAM问题。具体来说,将仅几何聚类和
视觉语义信息相结合,以减少由于小尺度对象、遮挡和运动模糊导致的分割误差的影响。
2022-08-31 09:39:14
1302
本文针对
视觉
SLAM的VO广泛使用的特征点法以及光流法存在的问题,寻求建立一种更加简便且稳定的图像配准算法,该算法以图像一致性为理论基础,利用VO顺序采集图像的帧间特点,最后通过实验验证了所设计的基于边缘特征一致性的图像配准评价符合VO应用的
视觉要求。
2022-09-15 10:22:59
688
相较于激光雷达
SLAM系统,
视觉
SLAM系统具有不主动发出信号的优点。此外,
视觉是对环境的稠密感知,可以利用
视觉特征构建出更符合人类感知的环境地图。
2022-12-21 16:18:09
2454
本文的优势不仅包括讨论A-
SLAM的内部组成部分,还包括其应用领域、局限性和未来前景,以及对过去十年A-
SLAM进行全面的统计调查。
2023-03-17 10:44:57
504
上周的组会上,我给研一的萌新们讲解什么是
SLAM,为了能让他们在没有任何基础的情况下大致听懂,PPT只能多图少字没公式,这里我就把上周的组会汇报总结一下。 这次汇报的题目我定为“
视觉
SLAM:一直在
2023-08-21 10:02:07
1575

激光
SLAM局部定位精度高但全局定位能力差且对环境特征不敏感,而
视觉
SLAM全局定位能力好但局部定位相对激光雷达较差,两者融合可以提高
SLAM系统的精度和鲁棒性。
2023-10-23 11:01:14
650

神经隐式表示已经被探索用于增强
视觉
SLAM掩码算法,特别是在提供高保真的密集地图方面。
2024-01-17 10:39:50
442

LSD-
SLAM即 Large-Scale Direct
SLAM,兼容单目相机和双目相机。LSD-
SLAM是一种基于光流跟踪的直接法
SLAM,但是实现了半稠密建图,建图规模大,可以在线实时运行。
2024-02-26 09:41:50
272

CEVA
视觉业务部门副总裁兼总经理Ilan Yona评论道:“
SLAM是实现高精度3D映射
设备周围环境的的基础技术。它是包括AR/VR头戴
设备、无人机、机器人和其它自动机器等广泛新兴
设备的关键组件
2019-05-28 16:59:00
1423
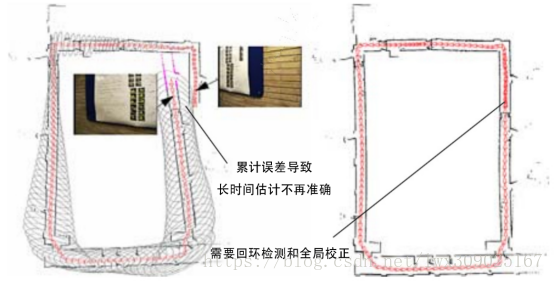
常有必要的 。 回环检测失败 如何提升机器人回环检测能力? 那么,怎么才能让机器人的回环检测能力得到一个质的提升呢?首先要有一个算法上的优化。 1. 基于图优化的
SLAM算法 基于图优化
2019-03-06 15:38:04
也将
SLAM分为激光
SLAM和
视觉
SLAM。激光
SLAM比
视觉
SLAM起步早,在理论、技术和产品落地上都相对成熟。基于
视觉的
SLAM
方案目前主要有两种实现路径,一种是基于 RGBD 的深度摄像机
2018-12-06 10:25:32
目前,
SLAM(即时定位与地图构建)技术主要被运用于无人机、无人驾驶、机器人、AR、智能家居等领域,从各应用场景入手,促进消费升级。 机器人 激光+
SLAM是目前机器人自主定位导航所
2020-12-01 14:26:37
研究生期间进行了基于2D激光雷达的
SLAM的研究,当时主要做了二维激光雷达的数据处理。小弟不才,没有入得了
SLAM的坑,却一直谜之向往,如今得以机会,决定正式迈出第一步,彻底进入
SLAM的坑!心中
2021-08-30 06:13:31
计算机
视觉干货资料,涉及相机标定、三维重建、立体
视觉、
SLAM、深度学习、点云后处理、姿态估计、多视图几何、多传感器融合等方向【计算...
2021-07-27 07:51:42
视觉
SLAM——特征点法与直接法对比以及主流
开源
方案对比 ORB LSD SVO DSO
2020-06-02 16:56:49
【总结】
视觉
SLAM笔记整理
2020-07-17 14:05:20
系统信息的直接来源,主要由一个或者两个图形传感器组成,有时还要配以光投射器及其他辅助
设备。
视觉传感器的主要功能是获取足够的机器
视觉系统要处理的最原始图像。
2020-08-05 07:53:42
系统信息的直接来源,主要由一个或者两个图形传感器组成,有时还要配以光投射器及其他辅助
设备。
视觉传感器的主要功能是获取足够的机器
视觉系统要处理的最原始图像。
2020-08-12 07:33:53
agv自由行走的问题。 定位和导航一般是相辅相成,传统的定位导航方式(电磁导航、磁条导航)的优缺点如下方图表所示,这些
方案的优点和局限性都很明显。稍微灵活点的导航定位
方案运用二维码、反光板等,人工
2018-11-09 15:59:01
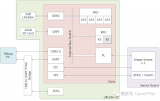
HOOFR
SLAMSystem: An Embedded Vision
SLAMAlgorithm and Its Hardware-Software Mapping-Based
2021-12-21 06:35:49
项目名称:机器人激光与
视觉融合的导航模块试用计划:申请理由本人在机器人
SLAM领域有4年开发经验,从最开始激光
SLAM到
视觉
SLAM,在物流机器人行业不断创新开发。
SLAM技术将赋予为机器人和智能体
2019-07-03 10:50:01
不断变化的,因此深度学习是人工智能AI的重要组成部分。可以说人脑
视觉系统和神经网络。2、目标检测、目标跟踪、图像增强、强化学习、模型压缩、视频理解、人脸技术、三维
视觉、
SLAM、GAN、GNN等。
2020-11-27 11:54:42
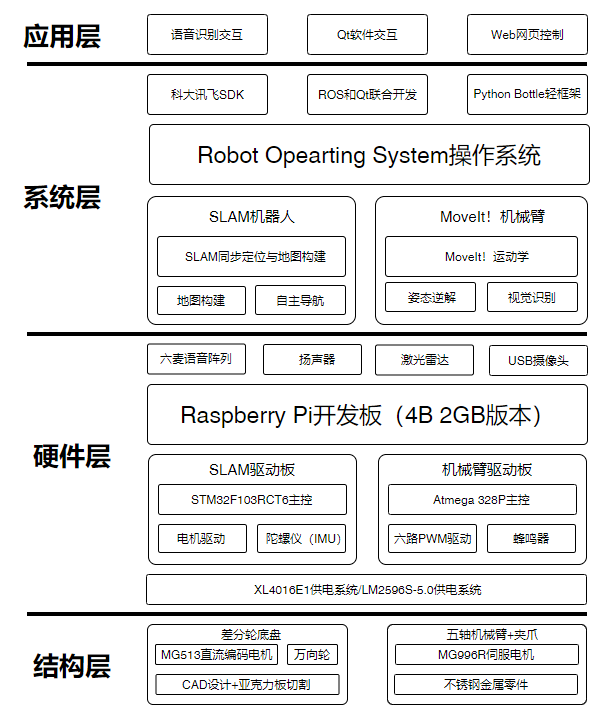
题目:基于
SLAM的移动机器人设计嵌入式PPT应具有的几个部分1、有哪些硬件 1)小车 2)STM32F429开发板 3)树莓派3b+开发板 4)4g通信模块 5)GPS模块 6
2021-11-08 06:17:14
基于
视觉的
slam自动驾驶,这是我们测试的视频《基于
slam算法的智能机器人》调研分析报告项目背景分析机器人曾经是科幻电影中的形象,可目前已经渐渐走入我们的生活。机器人技术以包含机械、电子、自动控制
2021-08-09 09:37:34
嵌入式系统开发与应用——基于
视觉的机器人
SLAM入门实践1一、OpenCV的安装与配置1. 下载OpenCV3.4.1并解压到ubuntu相应目录上2. 下载安装依赖库和编译工具cmake(1)更新
2021-12-16 08:16:12
如何实现基于RK3399开发板的cartographer激光
SLAM建图模块的设计?
2022-03-07 07:05:11
[size=1.14em](转载于欧时电子)对于曾多次了解这一领域的人们而言,对机器
视觉的最初概念可能都来自电影终结者,影片中我们受到了红色主调的增强现实版 T-800 终结者的威胁。[size
2017-09-25 00:15:53
大家好,我想学习
SLAM技术有资深的老师愿意教我吗?qq:496397940
2018-11-09 13:42:27
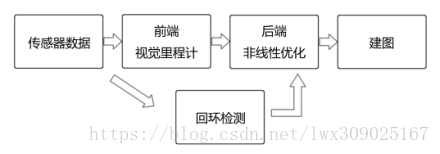
的
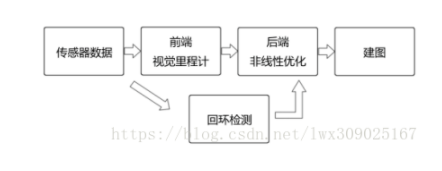
视觉里程计及后端优化的
SLAM系统,似乎已经比较好用了。但其在提高实时性的同时精度却降低了,一旦精度降低,又会面临长时间累计误差的问题,特别是像ORB-
SLAM那样只做局部地图优化的
方案。我们该
2018-10-23 17:47:22
机器人定位导航中,目前主要涉及到激光
SLAM与
视觉
SLAM,激光
SLAM在理论、技术和产品落地上都较为成熟,因而成为现下最为主流的定位导航方式,在家用扫地机器人及商用送餐机器人等服务机器人中普遍采用了...
2021-07-05 06:41:57
SLAM(同步定位与地图构建),是指运动物体根据传感器的信息,一边计算自身位置,一边构建环境地图的过程,解决机器人等在未知环境下运动时的定位与地图构建问题。目前,
SLAM的主要应用于机器人、无人机、无人驾驶、AR、VR 等领域。其用途包括传感器自身的定位,以及后续的路径规划、运动性能、场景理解。
2020-05-20 08:19:40
什么是激光
SLAM?
视觉VSLAM又是什么?激光
SLAM和
视觉VSLAM有哪些不同之处?
2021-11-10 07:16:02
什么是激光
SLAM?激光
SLAM技术在机器人运动控制系统中的应用是什么?
2021-07-30 06:37:25
机器人。 · 针对封闭环境的自动驾驶,可进行特性专门设计。 | 封闭场景导航算法支持 除了上面的特征之外,思岚
SLAM3.0相对
开源
SLAM
方案,还支持如:虚拟墙、虚拟轨道、自主充电、电梯调度
2019-01-21 10:57:46
实现单目
视觉同时定位与建图(
SLAM)仿真系统,描述其设计过程。该系统工作性能良好,其
SLAM算法可扩展性强,可以精确逼近真实单目
视觉
SLAM过程。以方便
SLAM算法的研究为目标,提
2009-04-15 08:50:37
 82
82
到产品过渡的阶段。行业中已经出现了一些以
SLAM技术为主的产品,但离进入千家万户还有一定的距离。 本文将从
SLAM的基本技术,典型
SLAM的应用以及目前行业中使用的解决
方案来介绍。 ▍
SLAM技术入门
SLAM是simultaneous localization and mapping的简写,中文直译为
2017-09-22 16:11:03
2
针对传统滤波器方法解决机器人同时定位与地图创建(
SLAM)时的误差积累问题,提出了一种基于
视觉词典(BOW)的三维
SLAM算法,以有效解决机器人长时间运动下误差积累的问题。相比图优化
SLAM中常
2017-12-22 14:58:13
2
当我们谈论
SLAM时,最先问到的就是传感器。
SLAM的实现方式与难度和传感器的形式与安装方式密切相关。传感器分为激光和
视觉两大类,
视觉下面又分三小方向。下面就带你认识这个庞大家族中每个成员的特性。
2018-01-09 13:09:02
23853
针对复杂环境下机器人的同时定位与地图构建(
SLAM)存在实时性与鲁棒性下降等问题,将一种基于ORB特征点的关键帧闭环检测匹配算法应用到定位与地图构建巾。研究并分析了特征点提取与描述符建立
2018-03-26 10:57:32
6
随着技术工艺的进步,摩尔定律的瓶颈似乎开始出现,追求单核更大功率的处理器还是比较困难的,而在
SLAM中, 单指令,多线程GPU提供的并行性,也非常适合实时
视觉的计算要求。
2018-04-09 11:06:32
5144

高仙的
SLAM2.0技术体系核心,是基于多传感器融合+深度学习的架构,即语义
SLAM。高仙
SLAM2.0技术
方案以语义分析、机器学习为基础,结合云端实时信息处理以及专为多传感器融合而开发的专业算法体系,真正实现了
SLAM在建图和导航两个环节的完整应用。
2018-05-15 16:48:30
8535
当今科技发展速度飞快,想让用户在AR/VR、机器人、无人机、无人驾驶领域体验加强,还是需要更多前沿技术做支持,
SLAM就是其中之一。实际上,有人就曾打比方,若是手机离开了WIFI和数据网络,就像无人车和机器人,离开了
SLAM一样。
2018-10-09 14:58:49
7240
SLAM(同步定位与地图构建),是指运动物体根据传感器的信息,一边计算自身位置,一边构建环境地图的过程,解决机器人等在未知环境下运动时的定位与地图构建问题。
2018-11-14 08:54:01
7334
随着传感器种类和安装方式的不同,
SLAM的实现方式和难度会有很大差异。按传感器来分,
SLAM主要分为激光、
视觉两大类。其中,激光
SLAM研究较早,理论和工程均比较成熟。
视觉
方案目前大部分实验室研究
2019-05-12 10:31:13
4896
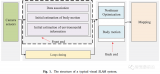
本文是调研
视觉
SLAM中的实现方法的总结,包括三方面内容:姿态计算、闭环检测、BA优化。
2019-05-18 11:49:01
4037
近年来
SLAM系统与其他传感器的融合成为了一大热点。
2019-05-24 09:45:06
12481
SLAM技术将赋予为机器人和智能体前所未有的行动能力。作为当前
SLAM框架的主要类型,激光
SLAM与
视觉
SLAM必将在相互竞争和融合中发展,必将带来机器人技术和人工智能技术的真正革命,也将使得机器人从实验室和展示厅中走出来,真正服务和解放人类。
2019-05-25 09:43:52
4277
,根据生成的点云数据,测算哪里有障碍物以及障碍物的距离。但是基于单目、双目、鱼眼摄像机的
视觉
SLAM
方案,则不能直接获得环境中的点云,而是形成灰色或彩色图像,需要通过不断移动自身的位置,通过提取、匹配
2019-08-09 17:31:20
1430
,根据生成的点云数据,测算哪里有障碍物以及障碍物的距离。但是基于单目、双目、鱼眼摄像机的
视觉
SLAM
方案,则不能直接获得环境中的点云,而是形成灰色或彩色图像,需要通过不断移动自身的位置,通过提取、匹配
2019-09-11 22:01:35
1759
运动恢复结构(SfM)和
SLAM所解决的问题非常相似,但 SfM 传统上是以离线形式进行的,而
SLAM则已经慢慢走向了低功耗/实时/单 RGB 相机的运行模式。
2019-11-22 14:34:07
16984

今年IROS机器人挑战赛包括两项赛事,其中一项是Lifelong
SLAM——适应场景变化的定位算法竞赛,比拼的是机器人通过
视觉进行持续自我定位的能力,着重考察
SLAM算法能否在视角
2019-11-25 11:10:04
3273
近年来,伴随移动机器人在各行各业的广泛应用,
SLAM这个“名字”逐渐被更多的人所熟悉,但是
SLAM具体是什么、
SLAM有哪些应用领域、激光
SLAM和
视觉
SLAM哪种方式更有优势等等这些问题却总是模糊不清。今天,小编就带大家来详细了解一下~
2020-01-18 17:43:00
3119
,就相当于人类失去了双眼一样。 一、什么是
视觉
SLAM?
SLAM的英文全称是Simultaneous Localization and Mapping,中文称作「即时定位与地图创建」,而
视觉
SLAM就是用摄像头来完成环境的感知工作。 举个例子,当你第一天去上大学的时候,为了迅速熟悉校园环境并且找到
2020-04-17 09:21:41
53848
在业内,
视觉
SLAM与激光
SLAM谁更胜一筹,谁将成为未来主流趋势这一问题,成为大家关注的热点,不同的人也有不同的看法及见解,以下将从成本、应用场景、地图精度、易用性几个方面来进行详细阐述。
2020-08-28 14:53:30
16068

SLAM技术是一种计算机程序,用于构建座席周围环境的虚拟地图并更新其实时坐标。
2021-01-22 14:55:00
18670
的激光雷达辅助
视觉
SLAM系统》论文发表在康奈尔大学的arXri平台,该论文由南方科技大学ISEE团队基于SCOUT MINI移动机器人平台进行快速二次开发,并在平台上搭载了GPS、Camera
2020-12-23 10:30:00
4611
当我们谈论
SLAM时,最先问到的就是传感器。
SLAM的实现方式与难度和传感器的形式与安装方式密切相关。传感器分为激光和
视觉两大类,
视觉下面又分三小方向。
2020-12-26 00:25:30
2034
SLAM这个“名字”逐渐被更多的人所熟悉,但是
SLAM具体是什么、
SLAM有哪些应用领域、激光
SLAM和
视觉
SLAM哪种方式更有优势等等这些问题却总是模糊不清。
2020-12-26 09:39:32
2084
定位技术是机器人实现自主定位导航的最基本环节,是机器人在二维工作环境中相对于全局坐标的位置及其本身的姿态。目前
SLAM(Simultaneous Localization and Mapping即时定位与地图构建)是业内主流的定位技术,有激光
SLAM和
视觉
SLAM之分。
2020-12-26 10:59:43
1286
在
SLAM系统中增加更多的相机可以提高鲁棒性和准确性,但会使
视觉前端的设计变得非常复杂。因此,文献中的大多数系统是为特定的相机配置定制的。在这项工作中,我们的目标是一个适用于任意多相机设置的自适应
2021-01-07 11:51:06
1792
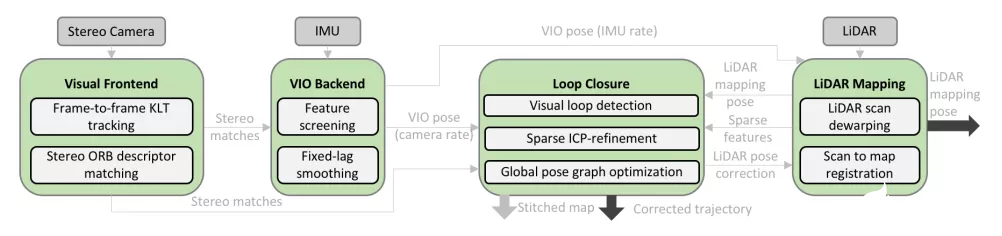
本文提出的立体
视觉+惯导+激光雷达的
SLAM系统,在比如隧道一些复杂场景下能够实现良好性能。VIL-
SLAM通过将紧密耦合的立体
视觉惯性里程计(VIO)与激光雷达建图和激光雷达增强
视觉环路闭合相结合
2021-02-18 17:59:06
1949
SLAM是 Simultaneous Localization and Mapping 的缩写,中文译作“同时定位与地图构建”。它是指搭载特定传感器的主体,在没有环境先验信息的情况下,于运动过程中建立环境的模型,同时估计自己的运动。如果这里的传感器主要为相机,那就称为“
视觉
SLAM”。
2021-03-20 09:13:12
3818
一般将使用单线雷达建构二维地图的
SLAM算法,称为2D Lidar
SLAM。大家熟知的2D Lidar
SLAM算法有:gmapping, hector, karto, cartographer。通常数据和运动都限制在2D平面内且运动平面与激光扫描平面平行。
2021-04-18 10:18:12
12157

在单目
视觉同步定位与建图(
SLAM)过程中,由于特征匹配阶段存在误匹配且耗时长,使得机器人初始化速度慢、定位精度不髙。针对此问题,基于概率运动统计特征匹配,提出一种单目
视觉
SLAM算法。通过设置
2021-05-27 14:25:54
6
我看来,vslam得发展也就是从MonoSLAM->PTAM->图优化
SLAM->ORB-
SLAM为代表的现代
slam,其中可能还有许多内容,不过这些
开源
SLAM一定程度上体现了
SLAM发展过程了....
2021-06-18 10:40:52
1357

ORB-
SLAM)的定位精度不能达到论文中,或者你预想的精度,那么这个事情是可以根据实际场景讨论的。 排名6, 11, 12, 14, 15的
方案是基于
视觉的,或者至少融合了
视觉。其漂移误差大都低于1%。这是什么概念?我本科时参加的机器人竞赛里,经过仔细标定的轮式
2021-07-06 10:57:04
3582
./oschina_soft/Snake-
SLAM.zip
2022-06-16 11:27:43
2
近年来,使用机器学习技术进行特征提取的基于调制解调器特征的
SLAM越来越受到关注,并有望在几乎所有机器人工作环境中超越传统方法。
2022-10-17 16:39:46
603
视觉
SLAM是一种基于
视觉传感器的
SLAM系统,与激光传感器相比,
视觉传感器具有成本低、保留环境语义信息的优点,能够与深度学习进行大量结合。
2022-11-02 15:02:32
747
一个建立在两个基于直接法的紧耦合的完整的激光
视觉惯导融合的
slam框架;
2022-11-09 09:55:54
1148
视觉
SLAM是一种基于
视觉传感器的
SLAM系统,与激光传感器相比,
视觉传感器具有成本低、保留环境语义信息的优点,能够与深度学习进行大量结合。
2022-11-29 21:38:37
627
而关于
SLAM,它是英文“同时定位与建图”的缩写。而有时候,我们还会听到VO,SfM等概念,而因此容易混淆。
2022-11-30 09:22:10
710
SLAM本质上是一个状态估计问题,根据传感器做划分,主要是激光、
视觉两大类。激光
SLAM的研究在理论和工程上都比较成熟,现有的很多行业已经开始使用激光
SLAM完成工业工作;而
视觉
SLAM
2022-12-02 15:00:28
1149
SLAM是 Simultaneous Localization and Mapping 的缩写,中文译作“同时定位与地图构建”。它是指搭载特定传感器的主体,在没有环境先验信息的情况下,于运动过程中建立环境的模型,同时估计自己的运动。如果这里的传感器主要为相机,那就称为“
视觉
SLAM”。
2022-12-05 10:16:31
1248
手持
SLAM
设备最大的特点肯定要放到手持这个动作上面,由于
SLAM算法的优越性,手持可以做到走到哪里测到哪里。
2022-12-27 10:43:41
3287
要实现高效
SLAM,需要一款高集成、轻量化且采集数据高效高可用的手持三维实时
SLAM
设备。
2022-12-29 17:30:22
1483

自主导航是机器人基础性和关键性技术,是机器人实现其他更高级任务的前提。
视觉
SLAM(Simultaneous Localization And Mapping) 利用
视觉传感器获取环境图像信息,基于多视图几何算法构建环境地图。
2023-01-16 10:58:29
2085
基于特征点法的
视觉
SLAM系统很难应用于稠密建图,且容易丢失动态对象。而基于直接法的
SLAM系统会跟踪图像帧之间的所有像素,因此在动态稠密建图方面可以取得更完整、鲁棒和准确的结果。
2023-03-13 09:38:45
746
视觉里程计最近几年越来越受到学术界以及工业界的认可,以ORB和VINS为代表的
视觉
SLAM已经可以满足绝大多数场景,而OV2
SLAM在其他VSLAM中脱颖而出,其实时性以及具体的回环性能在测试中都得到了认可。
2023-03-21 17:16:31
768
一般将使用单线雷达建构二维地图的
SLAM算法,称为2D Lidar
SLAM。大家熟知的2D Lidar
SLAM算法有:gmapping, hector, karto, cartographer。通常数据和运动都限制在2D平面内且运动平面与激光扫描平面平行。
2023-03-27 11:06:56
1385
SLAM是 Simultaneous Localization and Mapping 的缩写,中文译作“同时定位与地图构建”。它是指搭载特定传感器的主体,在没有环境先验信息的情况下,于运动过程中建立环境的模型,同时估计自己的运动。
2023-04-23 11:09:47
1241
SLAM(同步定位和地图绘制)在自动驾驶、AGV 和无人机等各种应用中引起了人们的广泛关注。
2023-05-08 17:06:28
964
视觉纹理导航,亦称Visual
SLAM导航,通过自动导引车车载
视觉传感器获取运行区域周的图像信息来实现导航的方法。
视觉导航是以地面纹理为特征信息的
视觉导航AGV 深圳市不止技术有限公司是激光雷达
2022-04-29 10:01:03
2613

用在
SLAM上的传感器主要可分为两大类,一种是激光雷达,而另一种是摄像头,为此,业内人士也将
SLAM分为激光
SLAM和
视觉
SLAM。激光
SLAM比
视觉
SLAM起步早,在理论、技术和产品落地上都相对成熟。
2022-02-15 19:15:24
1850

德赢Vwin官网 网站提供《
视觉
视觉
开源项目.zip》资料免费下载
2023-06-20 15:18:14
1
融合。 作为AR和计算机
视觉领域的领先企业,谷东科技受邀参与本次技术了论坛,与业内专家和学者进行深入的交流和探讨,共同探索
SLAM技术在现实世界中的发展和应用前景。我们分享了在
SLAM技术方面的最新成果和经验,包括基于深度学习的实时地图构
2023-08-01 09:37:23
526
激光雷达是最古老,研究也最多的
SLAM传感器。它们提供机器人本体与周围环境障碍物间的距离信息。常见的激光雷达,例如SICK、Velodyne还有我们国产的rplidar等,都可以拿来做
SLAM。激光雷达能以很高精度测出机器人周围障碍点的角度和距离,从而很方便地实现
SLAM、避障等功能。
2023-08-16 10:31:08
1895

近年来,
SLAM技术取得了惊人的发展,领先一步的激光
SLAM已成熟的应用于各大场景中,
视觉
SLAM虽在落地应用上不及激光
SLAM,但也是目前研究的一大热点,今天我们就来详细聊聊
视觉
SLAM的那些事儿。
2023-09-05 09:31:11
1389

IMU测量可以提高
视觉
SLAM在某些复杂场景的鲁棒性,在于相机快速运动、动态障碍物、光线明暗变化明显、环境中纹理缺失等导致图像信息质量较差的情况下,利用IMU信息仍能得到有效的定位结果。
2023-09-07 16:57:06
1099
GO-
SLAM主要还是基于NeRF进行稠密重建,可以发现相较于NICE-
SLAM这些SOTA
方案,GO-
SLAM重建场景的全局一致性更好,这主要是因为它引入了回环和全局BA来优化累计误差。
2023-09-11 10:03:29
685

什么是激光雷达3DSLAM?在了解这个概念之前,我们首先需要弄懂什么是“
SLAM”。
SLAM,英文是SimultaneousLocalizationandMapping,意思是即时定位与建图。通俗
2023-11-25 08:23:57
999

目前
视觉
SLAM系统可以在微型个人计算机(PC)和嵌入式
设备中运行,甚至可以在智能手机等移动
设备中运行(Klein和Murray,2009)。与室内或室外移动机器人不同,自动驾驶车辆具有更复杂的参数,尤其是当车辆在城市环境中自动驾驶时。
2023-12-04 09:22:37
548
 德赢Vwin官网 App
德赢Vwin官网 App









 工商网监
工商网监
评论