本菜鸟刚学
机器人控制,对于两
关节
机器人,实现既定的末端轨迹,轨迹规划已完成,但是程序的延时不准确,导致最终轨迹混乱,求大神破?
2015-04-29 16:21:23
控制在-20°C至+60°C内;85%以内,放置在
无尘、洁净、无腐蚀性气体、
无研磨液、
无金属粉末、
无油的环境中; 4、要严格按照直流
力矩电机清理和维护过程的流程说明来操作了,严格使用清洁过程要求
2018-06-21 09:07:02
力矩电机转子识别以后,1016产生数值,保存数据上电以后,给轴加使能(有电流声)没有报警,在手动运转该轴时,出现300608报警,更改电流限制参数1105后,该情况依然出现。请高手指点,谢谢~!
2023-12-28 07:44:42
在
机器人的设计中,
机器人的灵巧程度很重要。而
人最灵巧的莫过于手指,而手指的灵巧性取决于手指的机械结构和
电机驱动设计。这里简要的介绍了
机器人手指的电气系统,详细的描述了
机器人手指关节的
电机驱动设计。
2016-01-14 10:34:55
机器人
关节是
机器人各个零部件之间发生相对运动的机构。
关节之中,单独驱动的为主动
关节,反之称为从动
关节。
机器人
关节模组通常采用超声波
电机、伺服
电机、谐波减速器、VR减速器、行星齿轮箱
电机等。
机器人
关节电机
2021-05-27 11:26:11
现在的
机器人使用的
电机多是什么品牌的呀,还是自己根据需求定制的呀?
2016-03-15 10:37:57
直流
电机如何实现驱动控制?
机器人上到底用什么
电机好?
2021-10-13 07:43:29
`在论坛看到了那个波士顿动力公司的斑点 猎豹 大狗 野猫 这几种军用
机器人,也看了那些个测试视频,他们的那些
关节结构是怎样设计的啊?是液压还是机械?`
2015-03-09 11:41:04
改良以适应实际的市场应用。 5.
无刷直流
电机
无刷直流
电机(BLDCM)是在有刷直流
电机的基础上发展来的,但它的驱动电流是不折不扣的交流;
无刷直流
电机又可以分为
无刷速率
电机和
无刷
力矩电机。一般
2018-10-10 18:01:45
ABB
机器人伺服
电机维修常见故障是什么?
2021-09-29 06:48:18
研究生一枚,现在导师的项目需
要用DSP来控制直流
力矩电机。自己什么都不太懂,现在想入手一块开发板,请求各位推荐。谢谢,感激不尽呀!
2017-09-01 21:41:56
摘要我们提出了一个新的开源
机器人的腿部
力矩控制系统,这个系统的特点是低成本及结构简单。这个系统由高
力矩
无刷直流舵机和
适合阻抗调节和
力矩控制的低传动结构组成。同时我们也设计了一个适应冲撞的新型足底
2021-09-13 06:33:53
要因素要考虑。几乎对于所有小型到中型等大小的
机器人驱动器来说,驱动
电机的选择通常有刷直流
电机、
无刷直流
电机(BLDC)和步进
电机。(然而,某些情形下液压与气压机才是最好的选择。)有刷直流
电机是最古老
2019-08-10 08:30:00
在
机器人中,执行机构一般分为液压驱动和
电机驱动两种类型,其中又以
电机驱动最为常见。本文主要讨论一般
机器人驱动机构中
电机的选择问题。
机器人中常用的
电机分为有刷直流
电机、
无刷直流
电机、永磁
2021-09-01 06:12:56
在
机器人中,执行机构一般分为液压驱动和
电机驱动两种类型,其中又以
电机驱动最为常见。本文主要讨论一般
机器人驱动机构中
电机的选择问题。
机器人中常用的
电机分为有刷直流
电机、
无刷直流
电机、永磁同步
电机、步进
电机等。其中在中小型
机器人(尺寸在15cm-30cm)中,由于价格便宜,...
2021-08-27 07:46:37
小型
机器人,20cm左右的,现在有没有球形
关节元件?
2015-09-04 11:27:17
高速、高精度的任务。使用相机、力传感器和其他感知元件,
机器人可以感知到
人存在并做出相应动作避免对人造成伤害。某些情况下,
力矩传感器被放置在
电机减速箱的后面来直接检测外部
力矩的任何快速增加的变化;而其
2018-10-12 11:02:18
如何对采集
机器人的
关节位置及TCP位置进行虚拟仿真?
2021-10-08 06:31:46
说起对工业
机器人的性能要求,无非就是“快、准、狠”三字。其实这也就是对
机器人
关节伺服
电机的要求,今天我们就来拆解一下这三字背后的含义。其中“快”、“准”的意思大家都非常好了解,就是要求伺服
电机
2018-10-15 10:16:14
想做一个助力下肢外骨骼,想用
力矩电机做
关节驱动,信号提取模块做好了,想请教大神,如何用单片机控制
力矩电机,二者间加个什么控制电路?谢啦
2014-04-13 14:14:30
youshuang ding在
机器人中,执行机构一般分为液压驱动和
电机驱动两种类型,其中又以
电机驱动最为常见。本文主要讨论一般
机器人驱动机构中
电机的选择问题。
机器人中常用的
电机分为有刷直流
电机、
无刷
2018-10-19 10:31:20
如何选择扫地
机器人的
电机?
2021-03-02 07:05:22
机器人电动伺服驱动系统是利用各种
电机产生的
力矩和力,好直接或间接地驱动
机器人本体以获得
机器人的各种运动的执行机构。 对工业
机器人
关节驱动的电动机,要求有最大功率质量比和扭矩惯量比、高起动转矩、低
2015-01-23 14:33:53
伺服系统分为直流、交流和步进系统以及包括直线伺服在内的其他伺服系统。直流
电机电刷容易磨损形成火花。步进
电机由于功率不大,一般用于低精度小功率
机器人。交流伺服
电机驱动器具有转矩惯量比高、
无电刷等优势
2017-08-23 15:10:27
工具(如焊枪、喷嘴、机加工刀具、夹爪)与主构架的连接机构,它具有3个自由度。 驱动系统为
机器人各运动部件提供力、
力矩、速度、加速度。 测量系统用于
机器人运动部件的位移、速度和加速度的测量。 控制器(RC
2015-01-19 10:36:12
基本一致,只是大小不太一样,例如iiwa的每个轴基本都是下图这样:每一个
关节中都包含了
电机、伺服驱动、谐波减速器、
电机端编码器、
关节端位置传感器和
力矩传感器,
电机和减速器采用直连。整个
关节在
机器人内部
2018-11-01 11:08:12
机器人动态特性的有效方法。目前有许多方法用来增加结构件材料的阻尼,其中
最适合
机器人采用的一种方法是用粘弹性大阻尼材料对原构件进行约束层阻尼处理。四、
机器人主要结构㈠、
机器人驱动装置概念:要使
机器人运行
2018-10-12 10:16:22
我正在设计一个带有CSG324封装的Spartan6的FR-4 PCB。该板用于海底安装,应具有25年以上的使用寿命。
哪种PCB表面处理
最适合此应用?我相信ENIG在平坦度方面是最好的,但我相信
无铅HASL可以提供最佳的长期焊点可靠性。电路板在其使用寿命期间可能会受到一些振动。任何想法/建议?谢谢
2019-07-31 06:28:33
`随着中国科学技术发展迅猛,未来中国将成为为微型智能
机器人大国。如今智能
机器人需求量不断增长,其控制系统和自动化主要的产品超声波
电机的需求也将大幅度增长,
机器人手指关节用超声波
电机作为微型智能
机器人
2020-11-02 11:21:13
超声波
电机一般安装在
机器人手指关节处,
机器人的
关节驱动离不开伺服系统,
机器人
关节越多,对柔性及精准度就越高,所需的超声
电机数量就越多。
机器人对
关节驱动
电机的要求非常严格,因为超声波
电机具有以下优势
2020-11-24 11:30:02
说起对工业
机器人的性能要求,无非就是“快、准、狠”三字。其实这也就是对
机器人
关节伺服
电机的要求,今天我们就来拆解一下这三字背后的含义。其中“快”、“准”的意思大家都非常好了解,就是要求伺服
电机
2018-10-19 10:47:11
Ⅳ. 问题讨论1) 设计选择:设计一个低重量的四足
机器人,同时保持有效的阻抗和力控制能力需要我们将这些功能相互协调地设计。我们设计一个新型足式
机器人,使用
无刷直流
电机进行驱动,因为它们是一种高性能
2021-09-15 06:04:41
机器人运行起来, 需给各个
关节即每个运动自由度安置传动装置 作用:提供
机器人各部位、各
关节动作的原动力。驱动系统:可以是液压传动、气动传动、电动传动, 或者把它们结合起来应用的综合系统; 可以是直接
2018-10-30 15:02:58
:要使
机器人运行起来, 需给各个
关节即每个运动自由度安置传动装置 作用:提供
机器人各部位、各
关节动作的原动力。驱动系统:可以是液压传动、气动传动、电动传动, 或者把它们结合起来应用的综合系统; 可以是直接
2018-10-30 15:11:29
模数转换器(ADC)有很多规格,总是很难弄清
哪种ADC才
最适合既定应用。那么,选择转换器时只关注分辨率、信噪比(SNR)或者谐波是否可以?还有其他技术规格同样举足轻重吗?
2019-01-15 16:29:12
常用的
电机有哪些。
机器人常用的
电机包含三种:普通的直流
电机、伺服
电机、步进
电机。直流
电机1.直流
电机输出或输入为直流电能的旋转
电机,称为直流
电机,它是能实现直流电能和机械能互相转换的
电机。当它作电动机
2018-10-25 11:50:39
Hi-FRDS什么样的传感器可以用来测量速度?
哪种传感器
最适合测量速度?为什么?邮寄一些资料 以上来自于百度翻译 以下为原文hi frds what type of sensors
2019-06-05 06:28:23
如何控制永磁直流
力矩电机在加负载时自适应转动?
2016-03-28 21:51:26
电机加蜗轮蜗杆结构、气动方案作为
机器人手指方案,这些方案普遍存在噪音、精度不准、体积大、堵转烧机、断电失效等情况。<span]超声
电机作为核心驱动部件作为
机器人手指关节部件,可以做到静音
2020-09-28 14:08:22
目前大多数智能
机器人都以电磁
电机作为
关节执行器。由于电磁
电机的转速高,当作为
关节驱动时,不得不使用减速机构来降速或增力,这不仅会增大
机器人的机构尺寸,使得
机器人结构变得复杂,并且也带来伺服带宽变窄
2020-12-10 11:09:26
大多数情况下,有刷直流
电机是
机器人技术中最不吸引人的选择。
无刷直流
电机(图2)是在20世纪60年代出现的,由于坚固,小巧,低成本的永磁体和小型高效的电子开关(通常是MOSFET)可以切换到绕组的电流
2019-03-12 15:52:12
在微型
机器人行业中,微型
电机的应用非常多,如:手指
关节、脸部、机械臂,都是通过舵机连接微型
电机来进行各种动作。常见的几种
电机有无刷
电机、有刷
电机、超声波
电机、同步
电机、步进
电机,其中超声
电机
2021-01-22 10:55:40
机械部件。广泛应用在半导体,医疗,机床,印刷,转台,工厂自动化和
机器人等领域。QTR-A 65 和 78 是我们
力矩范围中最小的
电机,其中QTR-A 78-60
2022-09-21 16:20:30
RJS-II系列
关节模组是泰科智能推出的一款基于模块化理念设计、轻巧、高精度的协作
机器人
关节,一体化集成的RJS-II不仅结构尺寸更小,性价比更高,为您解决
机器人在更多复杂环境中的适应性和稳定性
2023-04-17 15:02:00
RJU系列
关节模组——面向商业、生活服务类应用 一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的
机器人
关节,而是一款能够给
机器人更多设计空间,和应用领域的
关节,客户
2023-04-17 16:25:29
RJS
关节模组系列——面向教育科研应用 集成高性能伺服驱动器、直流
无
框
力矩电机、高分辨率双编码器、谐波减速器、机械抱闸、力传感器于一体,高效率发挥
关节模组性能 创新开放 方便快捷
2023-04-17 17:53:17
RDM协作
机器人
关节伺服驱动模块是一款基于FPGA 先进技术开发而成的高性能、直流供电、结构极其紧凑的全数字通用伺服驱动器,最大功率可达 1000W。通过EtherCAT/CANopen
2023-04-17 18:13:06
产品优势专注
机器人
关节研发,RJS系列
关节模组具有定位精度高、性能可靠等特点。 模块化设计RJS
关节模组集成
无
框
电机、驱动器、谐波减速器、编码器、制动器于一体,结构小巧紧凑,6轴RJS
关节
2023-04-18 14:04:34
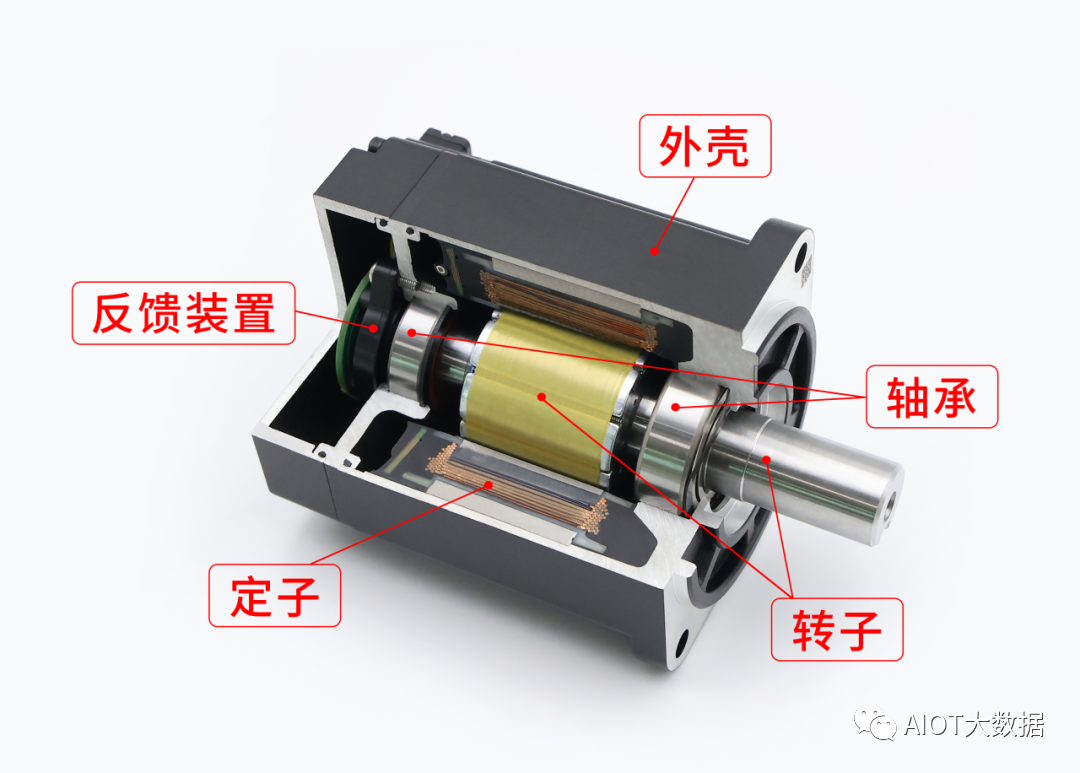
机器人
关节电机是专业为
机器人
关节设计研发生产。
电机既有中空大孔径,能保证
关节模组完美融合的组合,
电机的定转子机构紧凑,转子采用了高性能稀土永磁材料,此系列
电机转矩脉动极低,易于速度控制和精确
2023-04-18 17:35:19
RJU系列
关节模组一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的
机器人
关节,而是一款能够给
机器人更多设计空间,和应用领域的
关节,客户可根据自身产品方向,自由定位
2023-04-19 10:48:11
RJU系列
关节模组一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的
机器人
关节,而是一款能够给
机器人更多设计空间,和应用领域的
关节,客户可根据自身产品方向,自由定位
2023-04-19 10:53:03
泰科
关节
机器人具备哪些优势? 一、编程简单可以让
无编程经验的操作人员能快速设置和操作我们的直观、3D 可视化协作式
机器人。只需将
机器人手臂移动至需要的位置,或触摸方便易用的触屏
2023-04-19 15:13:28
RDM协作
机器人
关节伺服驱动模块是一款基于FPGA 先进技术开发而成的高性能、直流供电、结构极其紧凑的全数字通用伺服驱动器,最大功率可达 1000W。通过EtherCAT/CANopen 总线控制
2023-04-19 15:39:40
机器人
关节电机是专业为
机器人
关节设计研发生产。
电机既有中空大孔径,能保证
关节模组完美融合的组合,
电机的定转子机构紧凑,转子采用了高性能稀土永磁材料,此系列
电机转矩脉动极低,易于速度控制和精确
2023-04-20 10:07:10
简要介绍了直流
力矩电机的工作原理C详细讨论了直流
力矩电机的特点及其在精密跟踪雷达伺服系统中的应用.
2011-05-24 15:08:06
 52
52
基于模糊PID的直流
力矩电机转速控制-2004。
2016-04-05 16:25:09
22
大族
电机-
力矩电机
2016-12-25 22:33:35
0
的联合研发能力,对
机器人
关节、医疗
机器人、传感器万向节和制导系统等关键的运动控制应用,都能提供最合适且性能卓越的
电机。
2019-10-25 08:00:00
8
本文先后阐述了伺服
电机和
力矩电机特点及原理。随后分析了伺服
电机和
力矩电机的区别。
2019-12-30 11:37:01
 11901
11901
TF
电机在
机器人应用中非常多,如
机器人的
关节活动、行走、各种动作等等都是需要微型
电机来驱动的。抛开大型的
机器人不说,小型的
机器人就需
要用到TF有刷
电机、无刷
电机、TF减速
电机。
2020-06-25 18:40:00
1158
力矩电机在不平衡状态下运行,调节性能较差,但由于设备简单,这种调节形式应用较多,常用的单相调压方法有以下两种:
2020-08-09 04:36:00
4066
电机是生活中常用电子设备之一,针对用途不同,
电机可以做诸多划分。本文中,小编将为大家介绍伺服
电机的特点和原理,并对
力矩电机的特点和原理予以介绍。最后,小编将对伺服
电机和
力矩电机二者之间的区别予以探讨。如果你对
电机抑或伺服
电机、
力矩电机具有兴趣,不妨继续往下阅读哦。
2020-11-22 09:41:57
4150
虽然昆山同茂电子有限的主营产品是直驱
电机,包括直线
电机、音圈
电机、直线
电机模组和音圈
电机模组,但
力矩电机也是有售的,且具备
力矩电机研发定制能力。
2021-03-26 14:10:37
631
作为行业领先的协作
机器人
关节模组供应商, RJSIIZ系列
机器人
关节模组是泰科智能专为3-20Kg以下协作
机器人而设计,高度集成了包括无框
力矩电机、低压直流驱动器、谐波减速机、制动器和双反馈装置。尺寸小,符合协作
机器人紧凑、灵活的设计特点。
2021-04-15 10:58:04
2293
机器人
关节是
机器人各个零部件之间发生相对运动的机构。
关节之中,单独驱动的为主动
关节,反之称为从动
关节。
机器人
关节模组通常采用超声波
电机、伺服
电机、谐波减速器、VR减速器、行星齿轮箱
电机等。
2021-05-28 09:11:44
1
机器人
关节是
机器人各个零部件之间发生相对运动的机构。
关节之中,单独驱动的为主动
关节,反之称为从动
关节。
机器人
关节模组通常采用超声波
电机、伺服
电机、谐波减速器、VR减速器、行星齿轮箱
电机等。
机器人
2021-06-13 10:00:00
9764
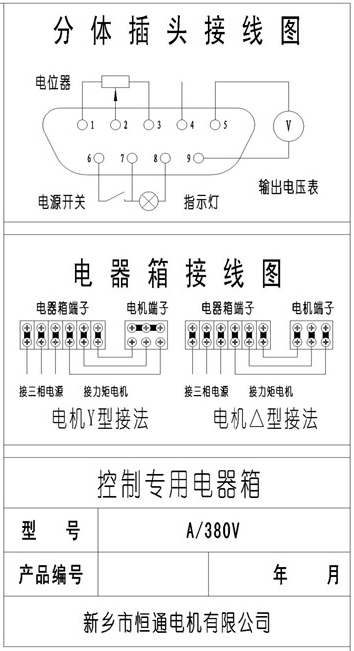
力矩电动机,又分为交流
力矩电动机和直流
力矩电动机,在电路结构上与一般的交、直流电动机相类似,但在性能上有所不同。本文以交流
力矩电机控制器的原理和检修内容为重点。交流
力矩电动机转子的电阻比变通交流电
2021-07-16 14:33:57
10808
力矩电机控制器是一种电流限制元件,在电路中连接电阻时,可以限制其支路的电流大小。小型化的
力矩马达控制器通常装在塑壳碳布中,而大的
力矩马达控制器则装在电阻率大的磁芯中。扭矩
电机控制器的欧姆电阻接近于
2021-07-19 18:26:33
3273
力矩电机是一种特殊的
电机,其特点如下: 高扭矩:
力矩电动机的转矩特性非常平坦,在额定转速范围内具有很高的扭矩输出,可以满足大负载、低速运转的应用需求。
2023-03-10 13:53:11
1713
力矩电机的型号通常会包含以下几个方面的信息: 机座号:通常用字母表示,表示
电机的外形尺寸和安装尺寸等信息。 功率:通常用数字表示,表示
电机的额定输出功率。 额定电压
2023-03-10 14:26:44
5888
力矩电机的工作原理与其他
电机类型相似,都是基于电磁感应原理来实现的。它是一种交流
电机,通常由定子、转子、电刷、电枢等部分组成。 当电流通过定子线圈时,会产生旋转磁场。转子中的导体受到
2023-03-10 14:29:12
4743
控制
力矩电机的转速和
力矩通常需要使用一些控制方法,下面介绍几种常见的控制方法: 变频控制:使用变频器对
电机进行控制,通过调整变频器的输出频率来改变
电机的转速和
力矩。变频控制可以实现精准的转速和
力矩控制,并且具有节能、稳定性好等优点。
2023-03-10 14:31:03
4614
力矩电机传递函数是描述
电机输入与输出之间关系的数学模型,通常用于
电机系统的控制和仿真等应用。下面介绍一种常见的
力矩电机传递函数测定方法: 测量
电机的速度常数(Kv)和扭矩常数(Kt
2023-03-10 14:35:51
1447
由永磁体、定子、转子和电子控制系统等部分组成。其中,永磁体是
力矩电机的关键部件,它产生了一个恒定的磁场,使得
电机输出的转矩与电流呈线性关系。与传统电动机相比,
力矩电机可以在较宽的转速范围内提供高效的转矩输出,从而使得其在工业自动化、
机器人、医疗设备等领域中得到了广泛应用。
2023-03-10 14:38:56
3138
力矩电机控制器的常见故障有以下几种: 电源故障:电源线路连接不良或电源波动等问题可能导致控制器无法正常工作。
电机线圈故障:
电机线圈可能存在接触不良、断路或短路等问题,导致
电机不能正常工作。
2023-03-10 14:47:22
3119
力矩电机和异步
电机之间有几个重要区别: 工作原理不同:
力矩电机是基于磁滞现象的工作原理,而异步
电机是基于电磁感应的工作原理。
力矩电机的转子和定子之间存在磁性阻尼,因此当负载增加时,它可以保持较稳定的转速和输出
力矩,而异步
电机在负载变化时可能出现速度和
力矩波动。
2023-03-10 14:51:38
1034
力矩电机具有低转速、大扭矩、过载能力强、响应快、特性线性度好、
力矩波动小等特点,可直接驱动负载省去减速传动齿轮,从而提高了系统的运行精度。
2023-03-10 15:36:33
398
力矩电机在接线之前,还应检查步进
力矩电机的绝缘,最好在接线之前完成对
力矩电机的单体调试检查,当
力矩电机符合现行规范要求时,再接外部线。一般低压
力矩电机的绝缘电阻要求大于0.5MΩ,摇表使用500V。
2023-03-10 16:59:56
6227
直驱
力矩电机精度更高,一般会使用高精度的编码器,由于编码器和转子(负载)直接耦合,因此
电机的精度直接与编码器的精度关联。
2023-05-11 15:53:34
1103
直接驱动直流
力矩电机体积小巧,特别适用于那些要求用最小的体积、重量、动力、响应时间输出最大效率和最好定位精度的伺服应用。
2023-06-12 09:44:29
761
力矩电机和减速
电机都是应用广泛的传动设备,在结构、原理、规格、性能特点、用途、技术参数都不一样,下面和大家一起了解一下这两种设备。 什么是
力矩电机?
力矩电机是一种具有软机械特性和宽调速
2023-06-12 09:46:52
1422
其实,
力矩电机的使用范围非常有限。1.要如何做到
力矩电机控制器与机械配比在
力矩电机的最佳使用范围以内,使收卷效果、线性张力、扭矩都能达到最佳匹配状态;2.一般情况下同一设备上,不论大线小线都是由人
2022-01-27 10:47:58
678
力矩电机控制器是一种电流限制元件,在电路中连接电阻时,可以限制其支路的电流大小。小型化的
力矩马达控制器通常装在塑壳碳布中,而大的
力矩马达控制器则装在电阻率大的磁芯中。扭矩
电机控制器的欧姆电阻接近于
2022-01-13 15:23:08
1194

由于采用不同的设计参数,
力矩电机的机械特性和用途分为两类:卷绕特性和恒转矩特性的
力矩电动机。1)卷绕特性
力矩电动机实现恒张力传动,适用于生产过程中需要使产品维持恒定的张力和用恒定的线速度把产品卷绕
2022-02-28 14:58:57
591

因为
力矩电机在电线电缆行业的应用是非常普遍的,所以
力矩电机的相关衍生品,比如,
力矩电机控制器就随之也广泛起来今天就来说说
力矩电机控制器在使用时的一些误区。一般从堵转电流6A~200A之间,常规
2022-06-08 18:13:17
712
因
力矩电机控制器在线缆、化工、轻工、纺织等行业中使用颇为广泛,今天就
力矩电机控制器的发展和应用来聊聊。早期七十年代的收卷
力矩电机控制器采用的是三相自耦式调压器,不仅是笨重、能耗大,而且容易
2022-06-15 16:10:54
499

力矩电机控制器简单故障判别方法:1.
力矩电机控制器通电时,
电机抖动a)检查是否为控制信号线接头松动b)检查是否为三相电源缺相。2.
力矩电机控制器通电后,
电机立即高速运行a)检查是否为控制信号已加在
2022-07-27 16:10:30
2425

作为行业领先的协作
机器人
关节模组供应商, RJSIIZ系列
机器人
关节模组是泰科智能专为3-20Kg以下协作
机器人而设计,高度集成了包括无框
力矩电机、低压直流驱动器、谐波减速机、制动器和双反馈装置。尺寸小,符合协作
机器人紧凑、灵活的设计特点。
2023-04-20 15:02:39
490
、
力矩电机等。 伺服
电机在控制精度、过载能力、速度响应等性能方面表现优异,广泛应用于工业自动化、
机器人等领域,而步进
电机则具备性价比优势。 二. 人形
机器人
电机用量 人形
机器人新增更多
电机需求,伺服
电机和步进
电机均具备适配
2023-06-25 15:18:24
785

力矩电机和减速
电机都是应用广泛的传动设备,在结构、原理、规格、性能特点、用途、技术参数都不一样,下面和大家一起了解一下这两种设备。
2023-07-17 16:27:08
442
电机
机器人的
关节伺服
电机控制是一种先进的技术,依靠
电机驱动器、控制算法来完成精确的电流和速度控制,来调整
电机的运动,以确保所需的位置、速度和
力矩。随着控制技术和半导
2023-09-22 08:17:42
1209

电机也就是我们常说的马达,在很多设备中都有
电机的身影。本文将对异步
电机、
力矩电机以及
力矩电机和异步
电机的区别予以介绍。一、异步
电机异步电动机又称感应电动机,是由气隙旋转磁场与转子绕组感应电流相互作用
2023-10-19 08:07:46
773

Tecnotion无框
力矩电机根据外径及扭矩大小现有QTR-A-65,78,105,133,160和QTL-A-210,230,290,310,385,485系列Tecnotion
力矩电机是一种永磁
2022-05-13 11:30:55
30
力矩电机是一种电动机,其工作原理是通过电源供电,产生磁场,然后利用磁场与电流之间的相互作用产生
力矩,驱动转子进行运动。
力矩电机是一种常用的电动机,广泛应用于各个领域,如工业、交通、家电等。
力矩电机
2023-12-20 09:38:23
717
 德赢Vwin官网 App
德赢Vwin官网 App









 工商网监
工商网监
评论