展商出席,买家们从专业人士的
介绍和现场演示
中获益。服务型
机器人展区吸引了大量的参观者和参展商的兴趣。2016年,主办方将这个成功模式延续下去以满足正如火如荼的市场需求。我司可协助贵司申请中小企业补贴
2015-10-15 16:32:07
工业
机器人整机:焊接
机器人、喷涂
机器人、码垛
机器人、搬运
机器人、装配
机器人、
直角坐标
机器人、其他工业
机器人等 服务
机器人:教育
机器人、家庭作业
机器人、娱乐休闲
机器人、残障辅助
机器人、住宅安全和监视
2016-10-10 16:30:56
介绍
坐标系以及它们之间的变换关系,数学的意味还是很浓的。讲了那么多的公式和规律,它们要怎么用在
机器人上呢?这篇文章将
介绍
坐标系和
机器人之间的纽带即连杆
坐标系。完成这篇文章的
介绍之后我们就可以利用一些
2021-09-01 06:17:14
德国BERGER LAHR(
百
格拉)公司是世界上
机器人供应商之一,生产多种规格的直线运动单元/导轨、步进电机、交流伺服电机、直线电机和多轴数控系统。我们的产品已广泛用于国内的大多数剑杆织机生产厂家
2020-03-10 13:02:52
`
机器人`
2015-08-09 12:23:02
请各位大神指导,移动式
机器人是怎么做EMC保护的,
机器人是锂电池供电,所以就不能接大地了,那么对
机器人的干扰是通过何种方式来释放或转移的?
2016-07-26 13:33:14
相关知识
机器人Python仿真软件
介绍软件安装使用Python的第一步现在,我们将尝试使该
机器人移动。 有关的RoBIOS命令是int VWSetSpeed(int linSpeed, int
2021-12-20 07:53:53
我觉得现在是时候讨论一些更有趣的话题,今天的话题是
介绍工业
机器人、协作
机器人和移动
机器人。我想每个人都知道
机器人是什么。
机器人是可怕的大型
机器,通常需要关在笼子
中,其功能安全要求一般涉及门联锁装置
2018-10-30 11:33:11
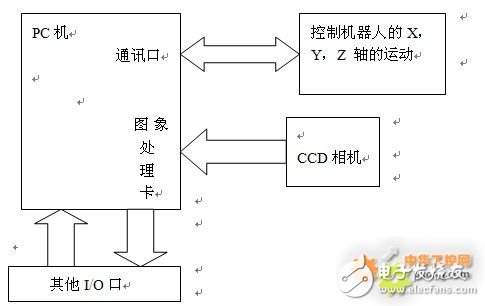
labview 视觉
机器人抓取
工件CCD相机的二维
坐标系的建立?希望分享,谢谢
2017-08-18 20:53:37
正中心, Z轴的零点为地面。角度
坐标以X轴正向为0度,逆时针方向为正。三、
机器人基本设置(Robot界面)
在左侧的Robot 界面
中,可以进行
机器人基本参数的配置,包含Robot, Slamware Core
2019-01-24 14:42:36
机器人的电机传动控制
坐标系是怎样确定的,是基于什么控制原理,学习
机器人的控制理论有哪些比较经典的书籍,求大神指导?
2013-06-10 17:03:57
机器人的定义是什么?
机器人优点和缺点是什么?
机器人是由哪些部分组成的?工业
机器人的应用有哪些?
2021-07-05 06:48:21
工业视觉
中,
机器人视觉领域
在技术和商用程度上均有较好的表现。本文从
机器人视觉的市场需求、技术原理以及发展趋势三个层面,深入浅出地阐述了
机器人视觉
在工业智能进程
中的重要地位。智能制造,
机器人视觉,工业
2019-08-16 04:00:00
机器人的移动通常是从管理
机器人总体任务进度的中央处理器发出位置变化请求时开始的。导航系统通过制定行程计划或轨迹以开始执行位置变化请求。行程计划需考虑可用路径、已知障碍位置、
机器人能力及任何相关的任务目标。
2019-09-10 10:44:32
。
机器人移动测量
工件或测量器械。检测方法和检测范围依据不同的
工件类型相互协调。
在
工件品种繁多的情况下,则使用换件抓爪。通过单接触技术方案,
机器人测量站已成为一种可快速作业的测量工作站。测量时间取决于测量范围
2015-02-11 17:15:03
停止工作,使
人与UR
机器人在有限空间内的安全合作得以实现,当然一次全面彻底的风险评估在任何情况下都是必要的。
在试用过程
中,偶还发现优傲
机器人嗓音非常小,还节能省电,特别灵活,无需固定式基座
2016-01-25 16:25:19
结构形式选择 根据前面“使用要求分析”
中获得的信息资料来选择
机器人的结构形式。原则上尽可能选择龙门式
直角坐标
机器人,但有时受工作空间限制必须选择悬臂式。
在食品搬运和玻璃切割等项目中会产生大量粉末
2017-08-16 11:31:54
的指定方向分量异常方便,p1.trans.z就可表示p1位置
在z轴方向距离
工件
坐标系原点的距离。本文简单
介绍ABB
机器人指令开发过程,其实也就是编写附带了参数的程序。在编程之前需要弄清几个基本概念。任务
2019-10-21 16:36:02
逛街是一件痛并快乐的事,快乐是因为逛街所带来的满足,但是满足之后问题也随之来了,大包小包的东西要怎么带回去呢,今天,小编为大家
介绍一款购物狂的得力助手---Budgee
机器人。
2020-08-26 07:26:21
本帖最后由 yezwsj1 于 2020-8-31 10:41 编辑 首先安装robot interfaceV3.0,然后利用ActiveX建立自动化应用,程序如下图可以实时访问
机器人
坐标。
2020-06-10 11:08:37
,并进行控制。 工业
机器人按臂部的运动形式分为四种。
直角坐标型的臂部可沿三个
直角坐标移动;圆柱
坐标型的臂部可作升降、回转和伸缩动作;球
坐标型的臂部能回转、俯仰和伸缩;关节型的臂部有多个转动关节。工业
机器人的基础知识
2010-05-18 22:03:02
请教大神:labview
机器视觉
中已经建立CCD相机的
坐标系,那如何测量矩形
工件相对于X轴摆放的角度?
2016-10-10 11:08:34
概要:
德国制造业之所以称霸全球,其背后是
德国拥有极高的
机器人自动化应用水平。随着
德国工业迈向以智能生产为代表的“工业4.0”时代,
德国企业对工业
机器人的需求
在继续增加。2010年至2014年,
德国
2016-01-12 13:59:25
服务型
机器人市场的主要“玩家”包括医疗器械公司 Intuitive Surgical、iRobot、谷歌(微博)、
德国的库卡(美的控股)和中国的大疆。此外,有数
百家新创公司也准备来分一杯羹。专家认为,专业级服务型
机器人和面向个人和家庭的服务型
机器人到 2019 年将各自占据市场的半壁江山。
2020-11-30 06:32:56
什么是
机器人控制系统?
机器人的运动控制系统包含哪些方面?
机器人控制系统的基本功能有哪些?
2021-10-11 09:38:12
机器人按臂部的运动形式分为四种。
直角坐标型的臂部可沿三个
直角坐标移动;圆柱
坐标型的臂部可作升降、回转和伸缩动作;球
坐标型的臂部能回转、俯仰和伸缩;关节型的臂部有多个转动关节。工业
机器人按执行机构运动
2015-01-19 10:58:38
CODESYS 原创
在欧洲尤其是
德国,借助于全自动
机器人进行
工件组装早已不是什么新鲜事儿,比如普福尔茨海姆市(
德国城市)的STOBER(斯德博)公司制造的无编码器LeanMotor在世
2021-06-28 11:52:46
复位后切断电源,以免
机器人突然启动误伤工人。本文出自力泰科技转载请注明出处关键词:桁架
机器人
直角坐标
机器人龙门式
机器人南京桁架
机器人桁架机械手 上下料桁架机械手臂 冲压上下料机械手 桁架机械手系统 三
坐标桁架
机器人高精度桁架机械臂 全自动桁架机械手 数控车床
机器人数控机床机械手`
2018-08-08 14:34:35
,运动学部分从
坐标变换人手,
介绍了正向运动学方程的建立、逆向运动学的求解以及
机器人的微分运动等内容。控制结构篇着重
介绍
机器人的传感技术、位置控制和力控制。针对
机器人控制领域的研究动态和主要研究方向,先进控制篇
介绍了传感信息融合、视觉控制、协调控制、移动
机器人技术、智能控制方法等。
2017-09-19 15:30:57
)速度空间范围不同:如图 4.1所示,
在之前的文章《两轮差速驱动
机器人运动模型及应用分析》
中对两轮差速驱动
机器人的速度空间做了分析,其只有2个自由度,不能沿着
机器人
坐标系Y轴运动,所以速度空间是一个矩形平面,效果如图 4.1(a)所示;而基于上述分析可知,全向轮平台有3个自由度,既可纵向、横.
2021-08-30 09:15:18
重点放在了强适应性和可重构的装配、仿
人灵巧操作、非结构化环境的感知、教育训练、
机器人与人共事的安全性等方面。 日本 日本的
机器人产业和技术都很发达。
在日本的
机器人路线
中,新世纪工业
机器人、服务
机器人
2016-01-28 15:21:21
工业
机器人的四大特征是哪些?工业
机器人是由哪些部分组成的?工业
机器人是怎样进行划分的?
2021-10-11 09:10:17
`华南
机器人应用培训中心拥有各种设备,开展各种不同的
机器人培训班。打造各种工业现场常见的
机器人工作站,现开展KUKA、发那科、三菱、ABB、爱普生工业
机器人培训对外招生。 一、认识
机器人技术:工业
2015-09-02 14:03:18
的空间位置和角度。示教时,先将焊丝与
工件上指定的焊接起始点接触,
机器人控制系统通过接触传感功能记录此起始位置作为基准位。实际焊接
中,
在寻找相应焊缝的起始位置时,接触传感检测出一个新位置,
机器人控制系统则
2018-03-13 09:15:48
制造出像
人一样具有智能的能替代人类劳动的
机器人,一直是人类的梦想,人类获取的信息80%以上是通过视觉。因此,
在智能
机器人的研究
中,具有视觉的
机器人的研究也就成了第一位的。对
机器人视觉伺服系统的研究是
机器人领域中的重要内容之一,其研究成果可应用在
机器人自动避障、轨迹跟踪和运动目标跟踪等问题中。
2019-09-27 08:07:35
的、多用途的操作机。其工作的行为方式主要是通过完成沿着X、Y、Z轴上的线性运动。多轴
机器人又称单轴机械手,工业机械臂,电缸等,是以XYZ
直角坐标系统为基本数学模型,以伺服电机、步进电机为驱动的单轴机械臂为
2020-07-29 06:57:04
,智能化已成为工程机械行业的主要趋势和方向发展。那么要想
机器人准确高效地执行任务,
机器人内部的各处连接必定不能有任何差错。这时候,
机器人线束的压接形式显得相当重要,我们也需要对它严格要求。压接的线束必须
2017-04-25 16:34:23
各种类型的
机器人(如2图):①
直角坐标型(如2图a是三个直线
坐标轴);②圆柱
坐标型(如2图b是两个直线
坐标轴和一个回转轴);③球
坐标型(如2图c是一个直线
坐标轴和两个回转轴);④关节型(如2图d是三个
2015-01-19 10:36:12
,另一端是自由的,安装着末端操作器(如焊枪),
在
机器人操作时,
机器人手臂前端的末端操作器必须与被加工
工件处于相适应的位置和姿态,而这些位置和姿态是由若干个臂关节的运动所合成的。因此,
机器人运动控制
中,必须
2017-12-15 10:25:19
ZN-IRP01工业喷涂
机器人实训系统一、产品概述ZN-IRP01工业喷涂
机器人实训系统主要针对表面功能性涂层的自动喷涂。通过喷涂系统将涂料从安装在
机器人末端的自动喷枪
中喷出,对
工件进行喷涂,工作
2021-07-01 10:26:25
循线音乐
百灵鸟
机器人,完成任务:让小
机器人沿着布置好的轨道行走,播放主人喜欢的音乐唤醒房间的主人。孩子们可以学习如何用简单的扬声器发出各种声音,掌握频率和声音之间的关系,并能够用简单的扬声器制作各种电子音乐;将具有乐曲播出功能的
机器人与具有简单巡迹功能的
机器人整合,充分调动孩子对
机器人的兴趣。
2016-03-30 17:02:39
、易爆场合下可采用气动逻辑元件组成控制装置。2 直线传动机构传动装置是连接动力源和运动连杆的关键部分,根据关节形式,常用的传动机构形式有直线传动和旋转传动机构。直线传动方式可用于
直角坐标
机器人的X、Y、Z
2018-10-30 15:11:29
场合下可采用气动逻辑元件组成控制装置。2 直线传动机构传动装置是连接动力源和运动连杆的关键部分,根据关节形式,常用的传动机构形式有直线传动和旋转传动机构。直线传动方式可用于
直角坐标
机器人的X、Y、Z向
2018-10-30 15:02:58
`拓野
机器人:
机器人浮动去毛刺主轴应用在哪些领域深圳市拓野
机器人自动化有限公司自成立以来,
在董事长凌琳的带领下,公司取得了飞跃的发展,先后成立了东莞、佛山、长沙、大连、苏州、上海、杭州等多家分公司
2015-08-21 16:20:27
在物流搬运行业,拳头
机器人由于其独特的并联结构,常用于高速整列、装箱等场合。其中,拳头
机器人的视觉线跟踪技术正得到广泛的应用,如下图所示:
2020-08-06 06:30:31
尚处于技术追赶阶段。差距目前工业
机器人约为日本的1/10 《2013-2017年
中国工业
机器人行业产销需求预测与转型升级分析报告》显示,全球工业
机器人的应用领域有所扩大,
在
德国市场,除了汽车行业
2015-12-17 14:53:56
关于ros智能
机器人,就是一个写智能
机器人代码的一个虚拟机,
2021-10-13 19:20:16
上网也找了
直角坐标转球
坐标的文章,但好像这个不大一样啊
2020-04-13 20:57:02
提供了标准接口。桁架
机器人也叫龙门式
机器人,属于
直角坐标
机器人。是一种建立
在
直角X,Y,Z[1] 三
坐标系统基础上,对
工件进行工位调整,或实现
工件的轨迹运动等功能的全自动工业设备。桁架式
机器人能够搬运
2020-11-30 09:44:15
labview
中的一维极
坐标与
直角坐标之间如何才能实现同步转换啊?现成的“一维极
坐标至
直角坐标转换(逐点)”不知道怎么用。给输入两个随机数之后输出的是不停变化的网格……我的输入是两个数组。 求高手帮忙
2012-05-21 08:58:43
本帖最后由 一只耳朵怪 于 2018-6-11 17:02 编辑 请问电机控制系统中
直角坐标系与极
坐标系的优势比较。TI是否有现成的demo例程。
2018-06-11 02:58:19
控制功能的智能伺服驱动器系统TLC534。 四、展望 本文是
介绍码垛
机器人系统
在活塞生产线
中的应用,
百
格拉公司还为许多种类零件的车,铣,磨和镗孔等加工设备配置了类似的供料下料
机器人系统
2020-07-29 08:09:46
血管微型
机器人
无损伤体内驱动方法
2009-06-28 01:15:29
想用Labview做
机器视觉,怎样将Labview通过视觉算出的
工件的偏移量以及偏移角度的值通过Profinet网络赋于ABB
机器人里的变量(变量类型:num)?
2016-10-31 13:15:38
我是新人,求帮助啊,明天需要提交轮式
机器人应用的报告,求大神给点建议,可用轮式
机器人应用于那些方面,要求实际可行,应用于生活,农业,军事都可以,谢谢啦
2013-04-17 16:32:16
为主要对象,配合工业应用
中的主流机型,系统地
介绍了工业
机器人技术与操作应用的基本共性知识。以工业
机器人技术基础知识为出发点,运用丰富的实物图片,概述了工业
机器人的定义、特点、分类、应用以及发展情况,全面分析
2018-10-29 17:03:22
江智党建
机器人是经过多年的市场沉淀 ;现已可以提供系统 全方位的党建
机器人服务
2022-06-21 07:59:59
德国百
格拉公司是世界上最著名的
机器人供应商之一,生产多种规格的直线运动单元 / 导轨、步进电机、交流伺服电机、直线电机和多轴数控系统。以此为基础,在短时间内可提供
2010-01-30 13:38:15
 7
7
直角坐标
机器人在汽车发动机涂胶机上的应用 随着
机器人技术的发展,
机器人技术在各行各业中得到了广泛的应用。
机器人作为执行机构,具用控制
2009-04-09 08:47:21
 467
467
文章作者:沈阳力拓自动化控制技术有限公司 杨树彬参考资料:
德国BAHR公司
直角坐标
机器人(www.lt-bahrrobot.com)关键词:
直角坐标
机器人、
无损检测、
2009-04-09 08:48:45
1139
德国BAHR
直角坐标
机器人在检测设备上的应用 BAHR公司
直角坐标
机器人在检测中的应用案例:
2009-04-09 08:49:52
645
无线电探向用的极
坐标
直角坐标转换器和测试图案发生器
2009-09-23 14:18:26
781
参心大地
坐标与参心空间
直角坐标转换 1名词解释:A:参心空间
直角坐标系:a) 以参心0为
坐标原点;b) Z轴与参考椭
2010-07-14 12:25:40
8668
大族电机-
直角坐标
机器人
2016-12-25 22:21:55
0
目前,应用在注塑行业的线性
机器人,亦即
直角坐标
机器人,其大多数的梁结构件可分为两种 : 一种是开挤压模所生产的铝型材 ; 另一种是从市场上直接购买国家标准系列的矩形钢管。 使用此两种材料,均有
2017-09-29 11:08:33
0
莱茵机电的经验及知识来主要
介绍
直角坐标
机器人和关节
机器人的特性,以及两种
机器人的应用对比。这些对比分析来自我们的经验及认识,有其局限性,不充分,仅供朋友们参考。 一、
直角坐标
机器人一、
直角坐标
机器人概念 基于
2017-10-09 11:15:57
0
一
直角坐标
机器人的定义及主要特点
机器人按ISO 8373定义为:位置可以固定或移动,能够实现自动控制、可重复编程、多功能多用处、末端操作器的位置要在3个或3个以上自由度内可编程的工业自动化设备
2017-10-12 18:24:45
0
设定
工件
坐标是进行示教的前提,所有的示教点都必需在对应的
工件
坐标中建立。如果在wobj0上建立示教点,如果
机器人在搬动以后就必须重教所有的点。如果有是在对应的
工件
坐标上示教的话就可以只修改一下
工件
坐标,而无需重教所有的点。
2017-10-17 17:06:49
4
工业
机器人按臂部的运动形式分为四种。
直角坐标型的臂部可沿三个
直角坐标移动;圆柱
坐标型的臂部可作升降、回转和伸缩动作;球
坐标型的臂部能回转、俯仰和伸缩;关节型的臂部有多个转动关节。
2017-11-27 19:38:36
5102
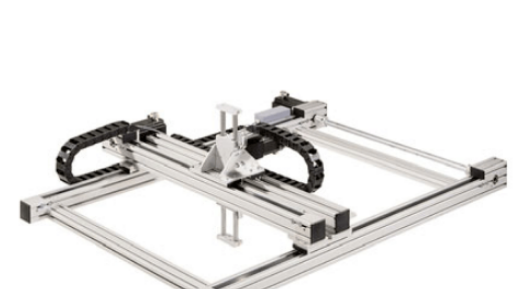
所谓码垛
机器人主要由几个直线运动轴组成,通常分别对应
直角坐标系中的X轴,Y轴和Z轴。在绝大多数情况下
直角坐标
机器人的各个直线运动轴间的夹角为
直角,通常X轴和Y轴是水平面内运动轴,Z轴是上下运动轴。
直角坐标
机器人的核心部件是直线运动轴,它是由精制铝型材、齿形带、直线运动导轨和伺服电机等组成。
2018-08-24 11:28:51
1162
工业应用中,能够实现自动控制的、可重复编程的、多功能的、多自由度的、运动自由度建成空间
直角关系、多用途的操作机。他能够搬运物体、操作工具,以完成各种作业。关于
机器人的定义随着科技的不断发展,在不断的完善,
直角坐标
机器人作为
机器人的一种,其含义也在不断的完善中。
2018-11-04 09:44:18
3295
直角坐标
机器人概念:工业应用中,能够实现自动控制的、可重复编程的、多功能的、多自由度的、运动自由度间成空间
直角关系、多用途的操作机。他能够搬运物体、操作工具,以完成各种作业。关于
机器人的定义随着科技的不断发展,在不断的完善,
直角坐标
机器人作为
机器人的一种,其含义也在不断的完善中。
2019-06-24 08:03:00
3099
手部空间的位置变化是通过沿着三个相互垂直的轴线移动来实现,常用于生产设备的上下料和高精度的装配和检测作业。一般
直角坐标型工业
机器人的手臂可以垂直上下移动(Z轴方向),并可以沿着滑架和横梁上的导轨进行水平二维平面的移动(X、Y方向)。显然
直角坐标型工业
机器人有三个移动关节,即3个自由度。
2019-01-14 15:35:25
3717
大地
坐标系:大地
坐标系是以大地作为参考的
直角坐标系。在多个
机器人联动的和带有外轴的
机器人会用到,90%的大地
坐标系与基
坐标系是重合的。但是在以下两种情况大地
坐标系与基
坐标系不重合:
2020-05-09 15:49:43
4003
机器人零位校正后,可以用
直角坐标系移动
机器人或运行程序; 同时
机器人也知道软限位的位置.
2020-06-12 15:48:08
2145
在很多产品的生产过程中,用
机器人码垛机来完成一些生产工序,能提高生产效率,降低成本,更能提高产品质量。
直角坐标
机器人码垛机是由腾阳自主研发的一种模仿人手操作的主动机械。它可以按程序反复抓取、搬运
2020-08-05 11:24:12
1236
在很多产品的生产过程中,用
机器人码垛机来完成一些生产工序,能提高生产效率,降低成本,更能提高产品质量。
直角坐标
机器人码垛机是由腾阳自主研发的一种模仿人手操作的主动机械。它可以按程序反复抓取、搬运
2020-08-24 11:53:01
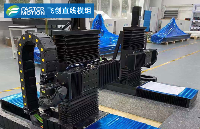
1379
坐标
机器人又称单轴机械手,工业机械臂,电缸等,是以XYZ
直角坐标系统为基本数学模型,以伺服电机、步进电机为驱动的单轴机械臂为基本工作单元,以滚珠丝杆、同步皮带为常用的传动方式所架构起来的
机器人系统,可以完成在XYZ三维
坐标系中任意一点的到达和遵循可控的运动轨迹。
2020-08-24 09:50:33
1951
直角坐标
机器人码垛机主要用于在自动化生产过程中执行大批量
工件的搬运,加工处理及转移等任务。它组成的码垛
机器人比其它
机器人成本低很多,而且效率更高,将被在更多的行业广泛应用。 码垛
机器人一般
2020-09-02 10:52:57
1465
直角坐标
机器人码垛机主要用于在自动化生产过程中执行大批量
工件的搬运,加工处理及转移等任务。它组成的码垛
机器人比其它
机器人成本低很多,而且效率更高,该设备主要有以下几部分构成: 一.电机驱动系统 直线
2020-09-06 10:55:51
1892
随着
机器人技术的发展,
直角坐标
机器人技术在码垛机上的使用越来越多。
直角坐标
机器人作为执行机构,具有控制方便,动作灵活,可实现复杂的空间轨迹控制。本机机体采用优质碳钢材质,整体美观大方。无外露锐角
2020-10-31 11:28:06
630
直角坐标
机器人码垛机是由腾阳自主研发的一种模仿人手操作的主动机械。它可以按程序反复抓取、搬运产品物件,完结某些特定工序,能在不同环境下高速运作。
坐标
机器人在工业应用中,能够实现自动控制、可重复编程
2020-11-04 14:36:54
1885
直角坐标
机器人码垛机是由腾阳自主研发的一种模仿人手操作的主动机械。它可以按程序反复抓取、搬运产品物件,完结某些特定工序,能在不同环境下运作,广泛应用于工业、农业、制造、冶金、电子、轻工和原子能等企业。
2020-12-18 17:23:25
4830
坐标
机器人是一款比较经济稳定的物料码垛机,它可以码垛袋装、箱装、桶装、瓶装等物料,组成部分都是一样的,区别在于抓手的不同,下面简单
介绍一下
直角坐标
机器人在纸箱搬运码垛作业中如何运用。 在一些制造
2021-05-27 15:08:48
897
直角坐标
机器人按照结构主要有十字式,悬臂式,龙门式或倒挂式等各种形式,
坐标
机器人码垛机是由腾阳自主研发的一种模仿人手操作的主动机械
2021-11-11 14:33:30
484
直角坐标码垛
机器人,由于其经济稳固,占地面积小更是受到用户的热捧。
直角坐标码垛系统扩展能力比较强,易于维护保养,
2022-09-17 11:32:26
230

直角坐标
机器人是指能够实现自动控制的、可重复编程的、多自由度的、运动自由度建成空间
直角关系的、多用途的操作机。又称大型的
直角坐标
机器人,也称桁架
机器人或龙门式
机器人,其工作的行为方式主要是通过
2022-11-02 14:59:56
1738
移动、上下升降、左右移动。
直角坐标
机器人可达到很高的位置精度(μm级)。针对不同的应用场合,对
直角坐标
机器人有不同的设计要求,比如根据对精度、速度的要求选择不同的传动方式,根据特定的工艺要求为末端工作头选择不同的夹
2022-11-23 11:26:34
2410
直角坐标型
机器人又称单轴机械手,其末端执行器(手部)空间位置的改变是通过三个互相垂直的
坐标x、y、z轴的移动来实现的。
2022-12-26 12:18:32
1408
直角坐标
机器人
直角坐标
机器人是指能够实现自动控制的、可重复编程的、多自由度的、运动自由度建成空间
直角关系的、多用途的操作机。又称大型的
直角坐标
机器人,也称桁架
机器人或龙门式
机器人,其工作的行为方式
2022-10-27 11:19:41
871

移动、上下升降、左右移动。
直角坐标
机器人可达到很高的位置精度(μm级)。针对不同的应用场合,对
直角坐标
机器人有不同的设计要求,比如根据对精度、速度的要求选择不同的传动方
2022-11-24 09:22:33
743
焊接
机器人常用的四种
坐标系:关节
坐标系、
直角坐标系、工具
坐标系和用户
坐标系。 关节
坐标系: 关节
坐标系是焊接
机器人中最基本的
坐标系之一。它表示
机器人的各个关节的位置,通常使用关节角度或编码器值来定义。每
2023-10-18 15:17:21
423

大地
坐标系:大地
坐标系是以大地作为参考的
直角坐标系。在多个
机器人联动的和带有外轴的
机器人会用到,90%的大地
坐标系与基
坐标系是重合的。但是在以下两种情况大地
坐标系与基
坐标系不重合。
2023-11-13 11:24:46
681

直角坐标
机器人是一种可重复编程、多自由度、运动自由度建成空间
直角关系的自动化设备,广泛应用于自动化生产线、装配线、检测线等场合。其特点包括高精度、高速度、高可靠性、易于编程和控制等,具有广泛的应用前景和发展空间。
2023-12-19 13:40:23
508
 德赢Vwin官网 App
德赢Vwin官网 App








 工商网监
工商网监
评论