 德赢Vwin官网
App
德赢Vwin官网
App


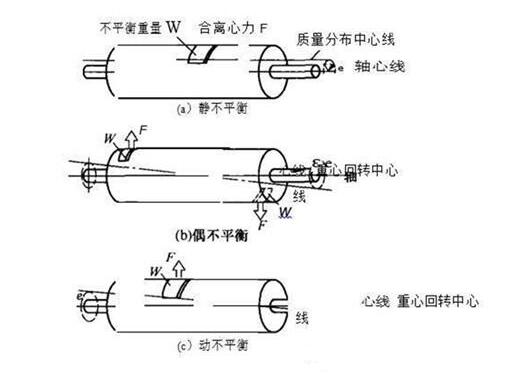
一. 静平衡
静平衡在转子一个校正面上进行校正平衡,校正后的剩余不平衡量以保证转子在静态时是在许用不平衡量的规定范围内,称为静平衡又称单面平衡。
二. 动平衡
动平衡在转子两个或者两个以上校正面上同时进行校正平衡,校正后的剩余不平衡量以保证转子在动态时是在许用不平衡量的规定范围内,称为动平衡又称双面或者多面平衡。
三. 转子平衡的选择与确定
如何选择转子的平衡方式,是一个关键问题。其选择有这样一个原则:
只要满足于转子平衡后用途需要的前提下,能做静平衡的,则不要做动平衡,能做动平衡的,则不要做静动平衡。原因很简单,静平衡要比动平衡容易做,省功、省力、省费用。
那么如何进行转子平衡型式的确定呢?需要从以下几个因素和依据来确定:
1.转子的几何形状、结构尺寸,特别是转子的直径D与转子的两校正面间的距离尺寸b之比值,以及转子的支撑间距等。
2.转子的工作转速
关转子平衡技术要求的技术标准,如GB3215、API610、GB9239和ISO1940等。
3.转子做静平衡的条件在GB9239平衡标准中,对刚性转子做静平衡的条件定义为:
如果盘状转子的支撑间距足够大并且旋转时盘状部位的轴向跳动很小,从而可忽略偶不平衡(动平衡),这时可用一个校正面校正不平衡即单面(静)平衡,对具体转子必须验证这些条件是否满足。在对大量的某种类型的转子在一个平面上平衡后,就可求得最大的剩余偶不平衡量,并除以支撑距离。如果在最不利的情况下这个值不大于许用剩余不平衡量的一半,则采用单面(静)平衡就足够了。
从这个定义中不难看出转子只做单面(静)平衡的条件主要有三个方面:
(1)一个是转子几何形状为盘状;
(2)一个是转子在平衡机上做平衡时的支撑间距要大;
(3)再一个是转子旋转时其校正面的端面跳动要很小。
对以上三个条件作如下说明:
(1)何谓盘状转子主要用转子的直径D与转子的两校正面间的距离尺寸b之比值来确定。在API610标准中规定D/b<6时,转子只做单面平衡就可以了;D/b≥6时可以作为转子是否为盘状转子的条件规定,但不能绝对化,因为转子做何种平衡还要考虑转子的工作转速。
(2)支撑间距要大无具体的参数规定,但与转子校正面间距b之比值≥5以上均视为支撑间距足够大。
(3)转子的轴向跳动主要指转子旋转时校正面的端面跳动,因为任何转子做平衡试都是经过精加工的,加工后已保证了转子的孔与校正面之间的行为公差,端面跳动很小。
根据上述转子做单面(静)平衡的条件,再结合有关泵方面的技术标准(如GB3215和API610),只做静平衡的转子条件如下:
(1)对单级泵、两级泵的转子,凡工作转速<1800转/分时,不论D/b<6或D/b≥6只做静平衡即可。但是如果要求做动平衡时,必须要保证D/b<6,否则只能做静平衡。
(2)对单级泵、两级泵的转子,凡工作转速≥1800转/分时,如果D/b≥6只做静平衡即可。但平衡后的剩余不平衡量要等于或小于许用不平衡量的1/2。如果要求做动平衡,要看两个校正面的平衡是否能在平衡机上分离开,如果分离不开,则只能做静平衡。
(3)对一些开式叶轮等转子,如果不能实现两端支撑,只做静平衡即可。因为两端不能支撑,势必进行悬臂,这样在平衡机上做动平衡很危险,只能在平衡架上进行单面(静)平衡。
4.转子做动平衡的条件在GB9239标准中规定:凡刚性转子如果不能满足做静平衡的盘状转子的条件,则需要进行两个平面来平衡,即动平衡。
只做静平衡的转子条件如下(平衡静度G0.4级为最高精度,一般情况下泵叶轮的动平衡静度选择G6.3级或G2.5):
(1)对单级泵、两级泵的转子,凡工作转速≥1800转/分时,只要D/b<6时,应做动平衡。
(2)对多级泵和组合转子(3级或3级以上),不论工作转速多少,应做组合转子的动平衡。
四、为什么要做动平衡
由于转子在制造加工过程中及组装过程中,最后装配完毕的转子总是不能做到动力上的完全轴对称(称为轴偏心),因此也就存在一定的不平衡量。这种不平衡量通常称之为原始不平衡量。
造成转子具有原始不平衡量的原因多种多样,但是如果转子存在不平衡量,当转子旋转时,转子的不平衡量将产生一个离心力。该离心力随着转速升高逐渐变大。离心力通过轴承传达到机器上,引起整个机器的振动,产生噪音、加速轴承的磨损、降低机器的寿命,甚至使机器控制失灵,发生严重事故。
动不平衡是最普遍的不平衡现象。它是静不平衡和偶不平衡的组合。
不平衡的转子经过动平衡校正后,不仅消除了偶不平衡,同时也消除了静不平衡,这时转子的中心惯性主轴和转动轴线也就完全一致,使转子达到平衡。但理想是丰满的现实是骨感的,想要把一个不平衡的转子平衡到不平衡量为零,是不可能的。因为受到动平衡设备的精度和转子局限性的影响。因此,就有了平衡精度的概念,即在现有的条件下,我们能达到的最合理的一个数值量级,这样即满足了生产生活的要求,又满足了经济性的要求。 动平衡试验是对转子进行动平衡检测、校正,并达到使用要求的过程。
当零件作旋转运动的零部件时,例如各种传动轴、主轴、风机、水泵叶轮、刀具、电动机和汽轮机的转子等,统称为回转体。在理想的情况下回转体旋转与不旋转时,对轴承产生的压力是一样的,这样的回转体是平衡的回转体。但工程中的各种回转体,由于材质不均匀或毛坯缺陷、加工及装配中产生的误差,甚至设计时就具有非对称的几何形状等多种因素,使得回转体在旋转时,其上每个微小质点产生的离心惯性力不能相互抵消,离心惯性力通过轴承作用到机械及其基础上,引起振动,产生了噪音,加速轴承磨损,缩短了机械寿命,严重时能造成破坏性事故。
为此,必须对转子进行平衡,使其达到允许的平衡精度等级,或使因此产生的机械振动幅度降在允许的范围内。
五、对动平衡机的精度要求
最小可达剩余不平衡量是平衡机平衡转子时所能达到的最小剩余不平衡量,是衡量平衡机最高平衡能力的性能指标。
硬支承平衡机可直接用校正面上的最小剩余不平衡量表示,单位为(克/毫米),有些也使用克/厘米。
最小可达剩余不平衡量受平衡机的型式、测量方式、传动方式、轴承形式及校正面的平面分离比和平衡机的灵敏度等等因素的影响。
要使转子的平衡精度很高(即剩余的不平衡量很小),就要尽量排除影响不平衡精度的因素。这些影响因素中平衡机的传动方式和传动件的不平衡影响最大。转子的轴颈精度也都应受到严格的限制,还有装有叶轮的转子件,重心不在转子中心的转子,装有轴承底套和密封使用盘根的转子。
| 精度等级G | g.mm/kg | 转子类型举例 |
| G4000 | 4000 | 具有单数个气缸的刚性安装的低速船用柴油机的曲轴驱动件 |
| G1600 | 1600 | 刚性安装的大型二冲程发动机的曲轴驱动件 |
| G630 | 630 | 刚性安装的船用柴油机的曲轴驱动件;刚性安装的大型四冲程发动机曲轴驱动件 |
| G250 | 250 | 刚性安装的高速四缸柴油机的曲轴驱动件 |
| G100 | 100 | 六缸和多缸柴油机的曲轴驱动件。汽车、货车和机车用的(汽油、柴油)发动机整机。 |
| G40 | 40 | 汽车车轮、箍轮、车轮整体;汽车、货车和机车用的发动机的驱动件。 |
| G16 | 16 | 粉碎机、农业机械的零件;汽车、货车和机车用的(汽油、柴油)发动机个别零件。 |
| G6.3 | 6.3 | 燃气和蒸气涡轮、包括海轮(商船)主涡轮刚性涡轮发动机转子;透平增压器;机床驱动件;特殊要求的中型和大型电机转子;小电机转子;涡轮泵。 |
| G2.5 | 2.5 | 海轮(商船)主涡轮机的齿轮;离心分离机、泵的叶轮;风扇;航空燃气涡轮机的转子部件;飞轮;机床的一般零件;普通电机转子;特殊要求的发动机的个别零件。 |
| G1 | 1 | 磁带录音机及电唱机驱动件;磨床驱动件;特殊要求的小型电枢。 |
| G0.4 | 0.4 | 精密磨床的主轴、磨轮及电枢、回转仪。 |
考虑到技术的先进性和经济上的合理性,国际标准化组织(ISO)于1940年制定了世界公认的ISO1940平衡等级,它将转子平衡等级分为11个级别,每个级别间以2.5倍为增量,平衡机从要求最高的G0.4到要求最低的G4000。单位为公克×毫米/公斤(gmm/kg),代表不平衡对于转子轴心的偏心距离。
六、转子动平衡技术的方法
转子的不平衡力产生的主要原因为: (1)转子制造时的原始不平衡量; (2)转子长期运转摩擦发热造成的弯曲; (3)转子运行时产生渐发性的不平衡量; (4)转子受到外界的变化影响从而生产转子弯曲。 针对转子的不平衡问题,通常采用离线动平衡校正方法和在线动平衡校正方法。前者通常将设备的转子拆卸下来,然后送至平衡机上进行校正;后者与前者最大的区别就是转子不用拆卸,而是直接在现场对其进行不平衡量修复。
6.1离线动平衡校正法
转子离线动平衡,又叫工艺动平衡。它是把待检测转子装在平衡机上,将传感器对准贴在转子上的反射标签,并将产生的信号反馈到平衡机上,技术人员通过平衡机上显示的不平衡量大小与角度,对其进行适当的校正与修复。其主要过程为: 首先,将旋转设备停机并取出故障的转子;接着把转子送至动平衡机上并确定转子轴承位;此时,固定好转子、设置好参数并启动平衡机; 然后将待测转子的周期性振动信号转化成电感信号,测出转子校正面对应的不平衡量与相位;最后通过去重或加重的方式加以校正与消除其不平衡量,从而达到安全生产的要求。 总的来说,离线动平衡校正法是一种使转子本身整体达到平衡的方法。
6.2在线动平衡校正法
在线动平衡,又叫现场动平衡或整机动平衡,顾名思义就是在现场对设备在工作转速下进行检测并完成动平衡操作。在线动平衡是指不拆卸机组,在其正常运行情况下对转子进行动平衡,使振动降低的方法。在线动平衡技术指的是通过对传感器采集到转子的振动信号,将其不平衡量、相位进行计算与分析,以及利用相关控制系统输入量的变化来消除其不平衡量。具体是通过传感器对转子振动信号的检测,以设备机座作为平衡机底座,转子和轴承的振动为线性系统,引起的振动为线性叠加,将采集的振动信息进行处理,确定转子各平衡校正面的不平衡量与角度,最后进行加重或去重的方法来消除不平衡量,从而达到校正的目的。所以说,在线动平衡校正方法具有避免因拆卸与安装引起的误差、减少不必要的人力、操作方便、易于自动化、确保机组安全有序地运行等优点。因此在线动平衡是消除设备振动的一项重要措施,同时这也是我国石化行业、机械设备等行业以后的发展趋势。
总的来说,在线与离线转子动平衡都能够对转子进行不平衡量校正,两者的校正精度都很高,修复后都符合安全生产的要求。因此,对一个转子进行动平衡时,我们要结合实际对其效率、成本等方面进行综合分析,判断在线或离线动平衡哪个适合,然后选择最恰当的方法进行操作。一方面可以大大提高效率;另一方面对转子动平衡操作的精度也有帮助。但是,由于设备支承结构与转子的多样性,在线动平衡比离线动平衡复杂很多,加上在线要求在最短的时间内达到标准的动平衡效果,其难度很大。
因此在线与离线动平衡的区别为: (1)两者所使用的测试仪器不一样; (2)在线动平衡能够使用的校正面比离线的少; (3)在线动平衡操作时人数较多; (4)两者的平衡标准不一样; (5)两者在经济与时间要求不同。
七、平衡工艺与方法
不平衡的转子经过测量其不平衡量,并加以校正以消除其不平衡,这就是转子平衡的工艺过程,也称平衡试验。它是转子机械加工中的重要工序。
1.校正面的选择
消除转子的不平衡,使其处于平衡状态的操作叫做平衡校正。平衡校正是在垂直转子轴线的平面上进行的,该平面称为校正平面。只需要在一个校正面内校正平衡的方式称为单面平衡或静平衡,必须在两个或多个校正平面内进行校正的方式称为双面平衡或多面平衡或称动平衡。
对于初始不平衡量很大,旋转时振动过大的转子,在动平衡校验之前要先进行单面平衡,以消除静不平衡。有时由于校正面位置选择不当(即重心不在选择的校正面内),校正静平衡后反而会使偶不平衡增大。因此,校正面最好是选择在重心所在平面内进行,以减少偶不平衡。若重心所在平面不允许去重时,一般应在位于重心所在平面两侧的两个平面上进行。
对于刚性转子,一般具有静不平衡与偶不平衡。要达到平衡,可在任意选择的与轴线相垂直的两个校正平面内校正其不平衡,即所谓双面平衡。校正方法一般采用加重(如配平衡块)或去重(如打孔)方式进行。校正平面的位置一般由转子的结构决定。
为减少在平衡操作中所花费的时间和劳力,应设法减少校正量,为此在可能的条件下,尽可能的增加两校正面的距离和校正半径,以取得好的平衡效果。
2.校验方法
转子的不平衡是因其中心主惯性轴与旋转轴线不重合而产生的,而平衡校正就是改变转子的质量分布,使其中心主惯性轴与旋转轴线相重合从而达到平衡。常用的校正方法有调整校正重量,加重或去重等。
加重可采用螺钉连接,铆接,焊接,这种方法能使转子达到更好的平衡效果和更高的平衡精度,而且方便、安全。
去重多采用钻孔,磨削,錾削,铣削等方法。对机泵的转子件、叶轮上采用磨削去重,或在联轴节上配重。
选用哪一种校正方法,取决于转子结构和工艺要求以及校正面的几何形状等。一般转子在设计时就考虑好加重或去重的位置。
3.校正误差
在平衡过程中,除平衡机的测量误差外,还存在因平衡校正的不准确(包括校正量的大小和位置)而产生的误差,这种误差称为校正误差。可分为校正角度误差、校正幅值误差、校正半径误差和校正平面位置误差等。
在实际校正中,上述的四种误差大多数情况是综合出现的,分析时就应该综合考虑。另外,还应考虑初始不平衡量与剩余不平衡量之间的比例,以及平衡机的不平衡减低率的影响。
编辑:黄飞














 工商网监
工商网监
评论