在讲校准之前,先介绍一下网络分析仪的“系统误差模型”。如果你去看各种论文或书籍,都喜欢给你下面这张图,然后列一大堆公式,先把你搞晕,这个是传统的10项误差模型。也有文献叫12项误差模型,包含了2个isolation误差项,但是现代网分基本做得很好了,这个项可以忽略,故大部分都讲10项误差模型。
2023-08-25 09:48:13 252
252 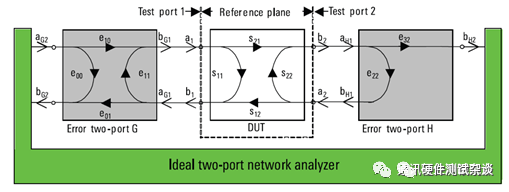
霍尔效应实验是一个受系统误差影响较大的实验,特别是在霍尔效应产生的同时,伴随产生的其他效应引起的附加电场对实验影响较大。霍尔效应产生误差的原因主要有以下几点:
2023-07-03 17:17:04837 矢量网络分析仪的误差来源主要有以下三个方面:漂移误差、随机误差、系统误差 1、漂移误差:是由于进行校准之后仪器或测试系统性能发生变化所引起,主要由温度变化造成。 2、随机误差:是不可预测的且不
2023-01-05 15:20:08228 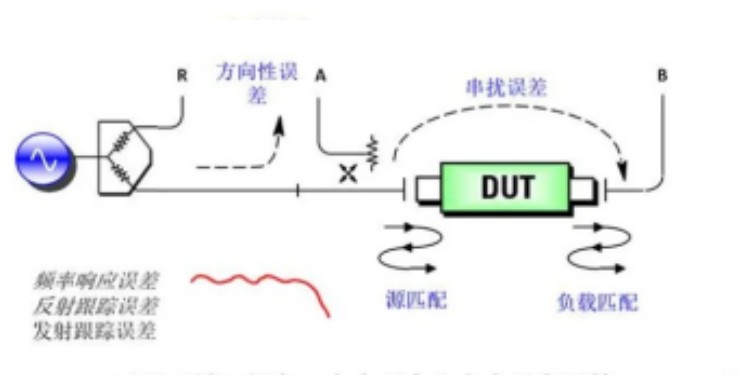
降低制造成本的同时,有效地提高了光学系统的可实现性,因此降低误差敏感度是光学系统设计应考虑的重要环节。本文分析了光学系统误差敏感度研究现状,总结了典型的光学系统降敏方法,并对这些方法在光学系统设计中的应用进行概述。最后,对光学系统低误差敏感度设计方法的未来发展进行了展望。
2022-11-14 10:07:23513 示波器是用来测量交流电或脉冲电流波的形状的仪器,由电子管放大器、扫描振荡器、阴极射线管等组成。那么示波器实验系统误差产生原因哪有哪几种?
2022-10-27 15:48:47610 
矢量网络分析仪的误差来源主要有以下三个方面:漂移误差、随机误差、系统误差1、漂移误差:是由于进行校准之后仪器或测试系统性能发生变化所引起,主要由温度变化造成。2、随机误差:是不可预测的且不能通过校准
2022-09-14 09:48:38223 
;nbsp; 误差多数情况下是指测量误差,它的传统定义是测量结果与被测量真值之差。通常可分为两类:系统误差和偶然误差。误差是客观存在的,它应该是一个确定的值,但由于在绝大多数情况下,真值是不知道的,所以真
2010-05-05 14:42:02
矢量网络分析仪的误差来源主要有以下三个方面:漂移误差、随机误差、系统误差。
2022-09-13 16:08:321037 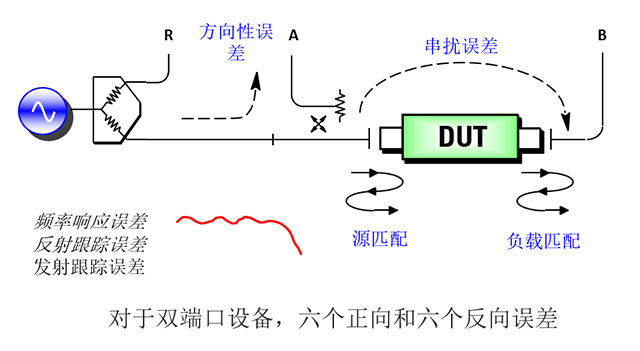
网络分析仪校准的目的是消除测试的系统误差。校准的思路是通过对标准件的测试得到网络分析仪系统误差项的具体数值,然后通过计算对被测件测试结果进行修正处理,消除其中误差成份,得到被测件真实值。在谈进阶篇之前,我们先来复习一下基础知识。
2022-08-10 09:19:271969 旋进旋涡流量计误差处理方法的主要目的是预防误差产生,因此需要采用这些方法对相关误差因素进行处理,下文将对具体方法进行论述。
2022-02-17 09:09:22858 。CRC利用范数正则化来解决测试样本的线性表示问题,以期得到一个较稳定的数值解。已有研究表明,正则化参数的选择对协同表示的数值稳定性起着非常重要的作用。文中提岀了一种新的基于测试样本误差重构的协同表示分类
2021-05-28 16:32:49 5
5 之前,都是需要作系统误差校准的,目的就是将测试装置本身引入的误差项修正掉,得到DUT真实的S参数。 系统误差校准可分为单端口和双端口系统误差校准,前者主要用于测试单端口器件的反射系数及其衍生参数,后者主要测试双端
2021-01-06 14:19:391984 在信息采集系统中,传感器通常处于系统前端,即检测和控制系统之首,它提供给系统处理和决策所必需的原始信息,因此,传感器的精度对整个系统是至关重要的。在位移、速度及加速度的测量中,经常使用差动变压器式
2020-12-04 10:05:332619 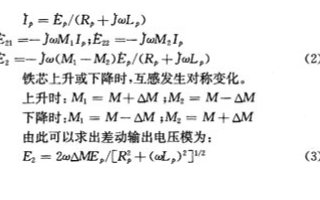
之前,都是需要作系统误差校准的,目的就是将测试装置本身引入的误差项修正掉,得到DUT真实的S参数。 系统误差校准可分为单端口和双端口系统误差校准,前者主要用于测试单端口器件的反射系数及其衍生参数,后者主要测试双端
2020-12-02 14:23:205100 随机误差是许多微小的、独立的、不可分割的系统误差的统计综合。或者说,它是多种因素造成的许多微小误差的总和。
2020-08-24 15:00:561620 三坐标测量仪除了定位误差,直线度误差,角运动误差,垂直度误差这四个几何误差之外,还有由于力变形、热变形、测量系统、测头系统、控制系统、数据记录和处理系统产生的误差。
2020-05-15 10:36:395283 1-1 .研究误差的意义是什么?简述误差理论的主要内容。答: 研究误差的意义为: (1) 正确认识误差的性质,分析误差产生的原因,以消除或减小误差; (2) 正确处理测量和实验数据,合理计算所得结果
2020-04-22 08:00:003 一、按误差出现的规律分类:按误差出现的规律,误差可分为系统误差、 随机误差和粗大误差三类。
2020-03-11 08:00:001 根据引入误差的设备不同,分别介绍了两种误差实时校正方法——信号采集部分的实时误差校正和输出设备的实时误差预校正的原理和实现方法。 两种误差实时校正方法具有简单、实现方便、速度快和精度高等特点,在采集原始图像的同时,既可以存储系统误差校正后的图像文件,又可以在监视屏实时显示逼真的原图像.
2019-11-22 17:17:4018 在测定之前,要求检测人员在检测过程中可能产生的系统误差进行认真的分析,必须尽可能预见一切可能产生系统误差的来源,并设法消除或尽量减弱其影响。
2019-11-10 07:33:0020412 根据测量误差的性质(或出现的规律),产生的原因,测量误差可分为系统误差、随机误差和粗大误差三类。
2019-11-02 06:12:0063803 系统误差,指的就是测量器具或方法引起的有规律的误差,体现为与真值之间的偏差,如仪器零点误差,经年变化误差,温度、电磁场等环境条件引起的误差,动力源引起的误差等。这种误差的值和符号保持不变,或测量条件
2019-07-01 16:25:17668 (ppm) 之间进行转换,以确保总体系统误差的正确计算。 线性器件数据表中的大多数误差是折算到输入端的 (RTI)。将误差折算到输入端有三个主要的好处:他将输出上总体误差的每一个误差源分离开来,不需要知道器件增益,并且简化了
2018-04-17 09:05:0110647 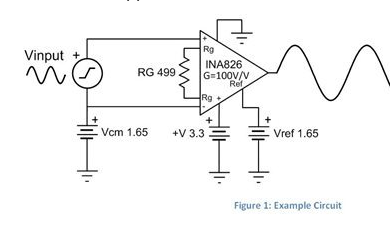
的雷达系统误差分离方法。通过处理某飞行任务的大量测量数据,估算出了不同航路的雷达动态测距、测角系统误差和随机误差。结果表明雷达测距系统误差与斜距成正比;测角系统误差为设计指标的2倍多;其随机误差与设计指标相符。
2018-03-06 11:44:000 实际上由于各种系统误差和偶然误差的存在,导致了这两层图形的位置发生了偏离,也就是通常所说的出现了套刻误差[1] 。
2018-01-18 11:40:4510574 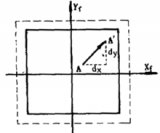
针对用于激光焊接的关节型工业机器人运动误差控制问题,根据关节型工业机器人伺服控制和运动学原理,分析了机器人运动误差的积累过程,并对运动误差和伺服系统误差分别进行了测量和比较。结果表明,伺服系统误差是运动误差的重要组成部分。该结论对机器人激光焊接的路径控制具有一定参考意义。
2017-10-12 18:19:066 (ppm) 之间进行转换,以确保总体系统误差的正确计算。 线性器件数据表中的大多数误差是折算到输入端的 (RTI)。将误差折算到输入端有三个主要的好处:他将输出上总体误差的每一个误差源分离开来,不需要知道器件增益,并且简化了
2017-04-17 20:58:321242 
本文针对半闭环伺服压装系统的误差特点,设计使用刚性块作为辅助装置进行误差标定,并通过最小二乘法拟合和误差表格插值,实现误差的补偿。经过对随机选取的实际生产数据进行误差补偿并与数显千分表实测值进行对比分析后得,补偿后的误差可以控制在1%左右,极大地提高了零部件压装合格判定的准确度。
2015-12-24 16:05:2512 设计了一种基于V/I转换电路的电流跟随器。对一种常见形式的V/I转换电路进行变形,得到一个存在一定系统误差的电流跟随器。通过对系统误差的分析,针对误差产生的主要因素提出了
2013-09-25 16:14:45161 针对卫星定位信息误差形成的原因和组成,分析了几何精度因子在误差形成中的影响,在对误差分析的基础上提出了一种误差处理的数学模型,采用卡尔曼滤波的方法对误差进行处理。实验
2011-11-04 11:25:0269 提出一种基于综合智能计算的数控系统位置控制方法,其基本思想是,在现有的数控系统内部嵌入一个神经网络的小型系统(采用插件形式嵌入),利用综合智能计算,得出系统补偿误差,实现对
2011-05-19 15:41:4030 3.1 误差的概念与分类 3.1.1 测量误差的概念及表达式 3.1.2 测量误差的分析 3.2 随机误差的处理 3.2.1 随机误差的概率分布 3.2.2 被测量真值和测量方差的估计值 3.2.3 测量结果的置信度与表示方法 3.3 系统误差的处理 3.3.1 系统误差的分类 3.3.2 判断系统误
2011-03-13 20:19:0985 误差分析与处理基础
测量:人们借助于检测仪表通过实验方法对客观事物取得数量信息的过程。真值:在一定时间、空间条件下客观存在的被测量的确定数值。测量值
2010-11-06 15:05:1126 在相同的观测条件下,对某一量进行一系列测量,如果测量误差在大小和符号上呈现一致性,即按一定的规律变化或保持为常数,这种误差称之为系统误差。系统误差具有积累性
2010-10-22 16:23:3215 在闭合导线测量中,导线边如果存在系统误差, 解算结果仍可能满足现行规范中的各项精度指标。通过一项边长接近的闭合导线测量实例,分析了产生误差的原因 对策,解算出
2010-10-14 16:18:5017 测量误差的分类和测量结果的表征
3.2 测量误差的估计和处理
3.3 测量不确定度
3.4 测量数据处理(有效数字的处理)
2010-09-07 15:53:109 1 引言
本文针对PID控制的特点,设计了一种积分分离的控制方法,即当系统误差较大时,取消积分环节,避免由于积分累积引起系统较大的超调;当系统误差较小时
2010-08-29 11:57:11790 
•导致测量不确定的因素
–仪器设备原理不完善、精度低
–环境因素的影响:温度、风速、湿度、气压…
–测量人员相关因素:责任心、
2010-08-23 17:25:0213 本设计指南探讨了信号调理、调整和校准电路,用于修正系统误差,从而以合理的成本确保工业设备安全、精确。校准部分讨论了利用最终测试补偿元件误差,通过上电自测试和连
2010-07-30 11:34:328 本设计指南探讨了信号调理、调整和校准电路,用于修正系统误差,从而以合理的成本确保工业设备安全、精确。校准部分讨论了利用最终测试补偿元件误差,通过上电自测试和连
2010-07-27 18:09:20628 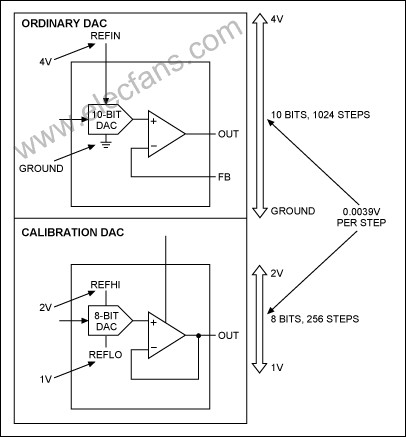
本设计指南探讨了信号调理、调整和校准电路,用于修正系统误差,从而以合理的成本确保工业设备安全、精确。校准部分讨论了利用最终测试补偿元件误差,通过上电自测试和连
2010-07-24 12:08:27556 主要内容1. 误差分类 ①按误差源分: 原理误差、制造误差、运行误差(方案、理论误差) (工艺) (使用、环境、磨损) ②. 按数学特征分: 系统误差、
2010-07-04 12:59:3720 对测量误差的一些术语、概念、常用误差处理方法和检测系统的一般静态、动态特性及主要性能指标作一扼要的介绍。
1.1检测系统误差分析基础1.1.1 误差的基本概念1.
2010-03-22 22:27:5720 现代检测技术:1.2 系统误差处理1.2.1 系统误差的特点及常见变化规律系统误差的特点: 出现的有规律性。系统误差的产生原因一般可
2010-03-19 08:54:5724 误差理论及数据处理教材(复习精华)研究误差的意义:1.正确认识误差的性质,分析误差产生原因,以减小或消除误差;2.正确处理测量和实验数据,合理
2010-02-23 16:54:2345 现代测量误差概念的内涵与外延:]误差和精度是测量平差与数据处理研究的最基本单元。文章对现代测量学科中的误差重新进行定义与分类,依据误差的分类对精度作更加明确而直观
2010-01-08 18:14:467 首先,建立测速仪与惯性测量单元的组合导航状态方程、量测方程和车载组合导航定位系统的卡尔曼滤波误差模型;其次,根据车载导航数据,进行了卡尔曼滤波仿真分析,评估
2009-12-14 14:58:426 介绍了某新型导弹参检仪的自动检定系统的设计思想,重点讨论了系统硬件和软件的实现方法,分析论述了系统误差的处理和控制方法。系统设计思想先进、结构简单、自动化程度
2009-09-14 15:02:2319 系统模型及其分类系统:具有特定功能的总体,可以看作信号的变换 器、处理器。系统模型:系统物理特性的数学抽象,一般也称为数学模型。 电路的微分方程为:该微
2009-09-08 21:00:2510 为提高传感器的准确度,减少传感器的研制成本,提出了基于神经网络多传感器误差补偿的方法。该方法利用BP 网络较强的非线性映射能力,网络通过学习能实现对传感器系统误差的补
2009-07-13 10:31:028 误差分析及处理技术
测量误差的基本概念
1. 绝对误差绝对误差是示值(或称测量值)与被测量真值之间
2009-05-19 08:41:00833 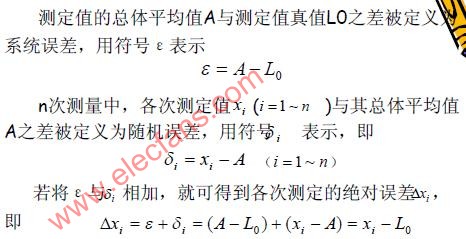
在测量系统中,传感器的非线性特性是测量系统误差的主要来源。要提高测量系统的精度,就必须进行误差补偿。设计了一个用模糊小脑神经网络实现的补偿环节。该补偿环节是一
2009-03-14 18:27:0111 为了提高工业生产过程中厂泛应用的光电积分测色仪的测试精度,分析、研究仪器误差成为仪器设计的重要内容之一。在分析探测器的光谱三刺激非线性误差的基础上,进行了
2009-03-14 08:32:4014 误差从性质上分类、特点 误差从性质上可分为三大类,即:系统误差 随机(偶然)误差 疏失误差(粗大误差、过失误差)
2008-09-18 01:12:5710062 真有效值变换:负载网络和取样电阻上采集的是的交流电压信号,如果直接送单片机A/D进行处理,会增大系统误差。为把系统误差控制在题目要求的范围内,我们在每一个信号的输
2008-04-03 13:14:2310399 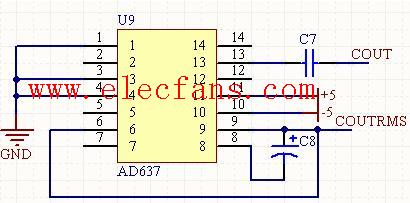
 德赢Vwin官网
App
德赢Vwin官网
App












 工商网监
工商网监
评论