
资料下载


×
使用STM32单片机实现四轴飞行器控制系统的设计资料合集
消耗积分:10 |
格式:rar |
大小:1.07 MB |
2021-01-16
木头1233
分享资料个
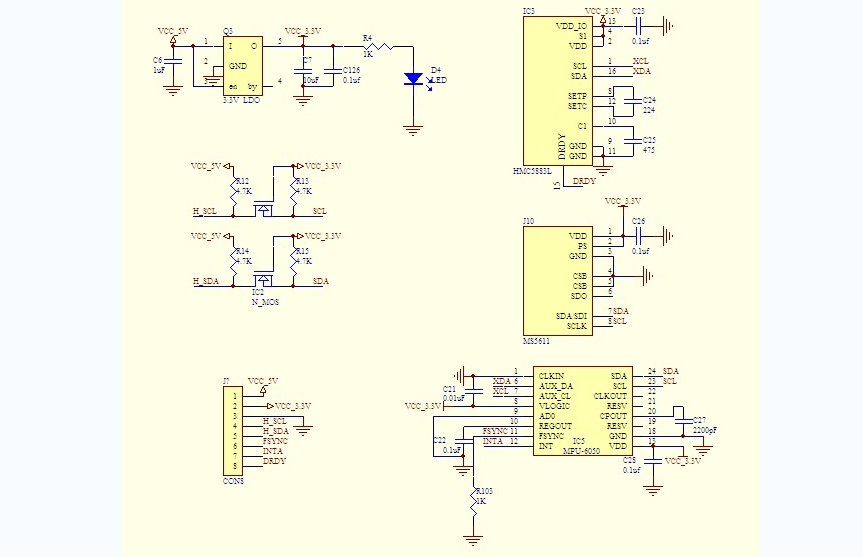
本文档的主要内容详细介绍的是使用STM32单片机实现四轴飞行器控制系统的设计资料合集包括了:原理图和PCB与程序源码等
本设计采用一体化的设计思路,就是机身和处理器板作为一个整体,小型四轴器的处理器使用STM32F103芯片,传感器使用MPU6050,接收板使用STM32F4 Discovery开发板,使用IIC总线的方式与处理器连接;遥控板上面使用NRF24L01无线芯片,通过上位机利用自己定义的协议来完成小型四轴飞行器的姿态显示和控制;采用空心杯电机和两对正反桨,电池使用4.1V的锂电池。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表德赢Vwin官网 网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






