

入门PIC需要准备什么工具呢?
电子说
描述
最近,一个帖子上了热榜。一位网友在论坛咨询了关于入门PIC的技巧,背景是这样的:
1:8位的PIC,选什么型号来学比较好?要求这个芯片是近几年【新推出】的【大众化】的,有LQFP32以下封装甚至有PID封装的。
2:MPLAB IDE ,MPLAB X IDE ,MPLAB XC8 ,它们之间是什么关系?需要注册或者购买版权的吗?我只会用C语言,我需要安装什么软件?
3:需要购买下载线吗?还是有USB转串口即可下载?仿真工具暂时就不考虑了(如果是一体化的便宜的也可以考虑)。
4:我之前就喜欢玩AVR的ATmega48-88-168,没有选择M128来玩是因为觉得它比较老款,而且它没有LQFP32以下的封装,再说我也不需要太大的资源
5:最重要的是我不懂得E文,之前的AVR有少量的中文,后来出的基本没有中文数据手册了,而我这几天发现原来PIC【官网】有大量的中文数据手册,而且 MPLAB X IDE 也是中文界面的,既然它对中文这么友好,所有我就想学一下它。这几天我还在【芯圣】单片机那里购买了3块HC89F0541的51系列1T的开发板,正准备来玩一下的,突然发现这个PIC有个中文社区,里面有大量的中文资料,所以,就不想了解HC89F0541了,估计PIC比较可靠是吗?
另外也想说一下这个HC89F0541芯圣单片机,看【芯圣】资料他家的所有单片机都有一个很好的特色,就是:外设功能引脚全映射模块。它允许大部分功能端口可任意映射到任意I/O 端口,比如说UASRT的TXD,RXD,它可以指定由任意的IO脚输出或者输入。
热心的网友是这样推荐的:
开发、学习PIC单片机要用到以下软硬件工具:
1. MPLAB IDE 老的集成开发环境软件,这个是所有PIC单片机的开发平台,2016年以后推出单片机基本上已经不支持了;
2. MPLAB X IDE 新的集成开发环境软件,支持全部的8位、16位和32位芯片(部分比较老的芯片不支持);
3. MPLAB XC8是8位单片机C语言编译器,你用C语言编程必须要用此编译器,需要单独安装配合 MPLAB X IDE 使用;
4. 另外还要用到PIC单片机开发板、编写器(如KIT4或ICD3、ICD4);
5.建议买一个 MPLABPICKit4在线调试器。
以上是最基本的开发配置。
推荐MPLAB X IDE(集成开发环境) + XC8(编译器), 硬件可以直接选择一块curiosity nano开发板。PIC系列8位单片机为适应各种不同的用途,推荐PIC16F722/3/4/6/7。另外,PIC16F1946和PIC16F877A是8位单片机中性价比较高的一种。
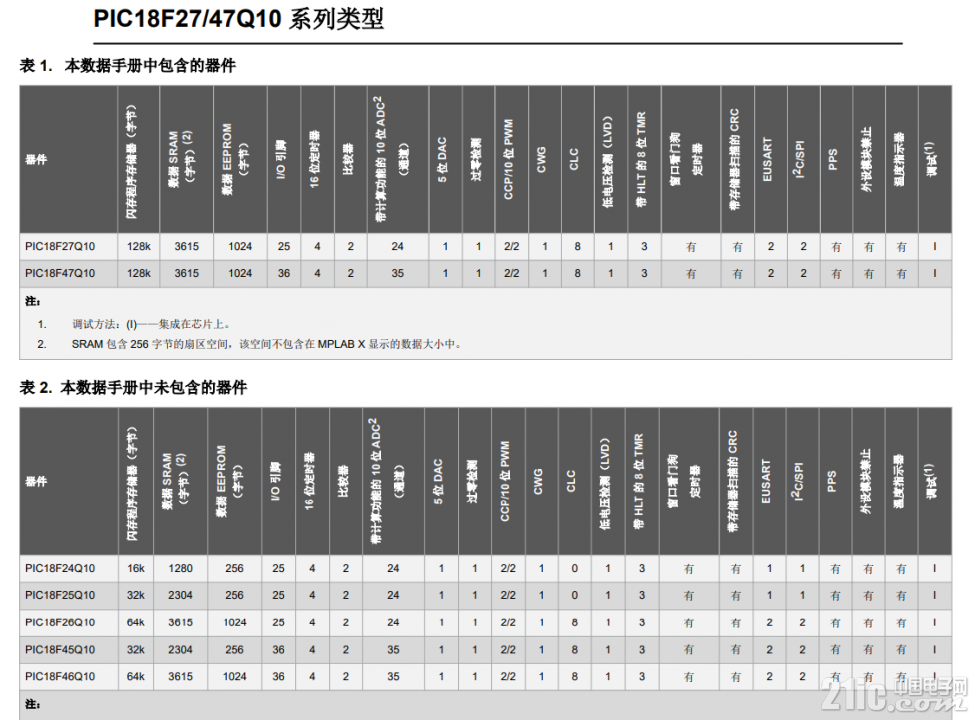
最终,panxiaoyi在芯片方面选择了PIC18F27Q10和PIC18F47Q10系列。选择它们是因为它们有中文数据手册,资源丰富,某宝购买方便,也不贵,包邮10多元。下载线选择了pic kit3.5。
软件环境方面,现在已经安装了 MPLAB X IDE v4.20 没有安装5.x版本,因为4.x的中文界面更好,同时也安装了xc8。
点灯例程:
#include
#ifndefXC_CONFIGURATION_H#defineXC_CONFIGURATION_H#include
其他PIC网友优质开箱测评帖: 1、[PIC/AVR MCU] 【CuriosityNano测评报告】初识PIC16F15244用户:21ic蓝V作者jinglixixi 最近,如愿地收到了PIC16F15244Curiosity Nano评估工具包。其实说是工具包会有些误解,它其实是由一块PIC16F15244开发板和2排插针构成。 除去包装后,将开发板与排针连接后,则如图1所示。
图1 PIC16F15244开发板
由于工具包并没有配置相应的USB线,所以在找到一条USB线后便迫不及待连上电脑相看一下上电后的效果,其状态如图2所示。也就是说除了电源指示灯被点亮外,并无太大的变化。
图2 上电效果 但与此同时,在电脑上还有着一定变化的,明显的效果就是在安装驱动后,桌面上出现了一个虚拟的U盘,见图3所示。
图3 虚拟U盘 在打开U盘后,可见到里面存有3个文件,见图4所示。

图4 U盘内容 此时若打开资源管理器,则可看到不仅有虚拟的U盘,还有虚拟的串口,见图5所示。

图5 虚拟串口 观察到这里,似乎能做的也就这些了,那我们就为后续的工作先做些准备把。
1.找到那张器件联络图(原理图),下载为: ww1.microchip.com/downloads/en/DeviceDoc/PIC16F15244_Curiosity_Nano_Schematics.pdf,该原理图给我们的关键内容如图6所示。 由此可知,板载的2个器件与MCU的连接关系为:LED(黄色) --- RA2(低电平点亮)SW(用户键)--- RC2(按下为低电平)此外,串口的占用引脚为:TX(发送) --- RC1RX(接收) --- RC0 2. 找到硬件的用户使用指南
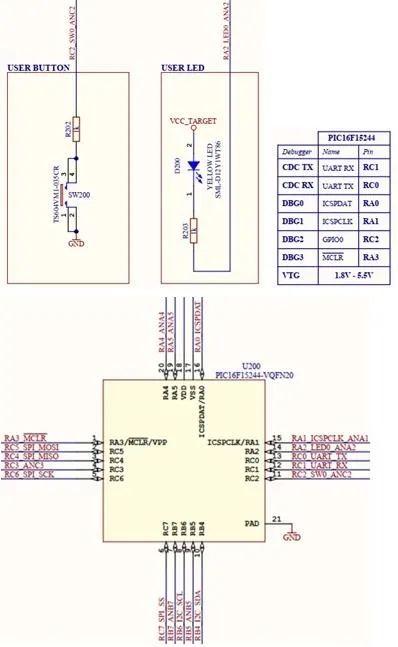
图6 关键内容 3. 了解PIC16F15244为我们具有哪些特色,其主要内容为:
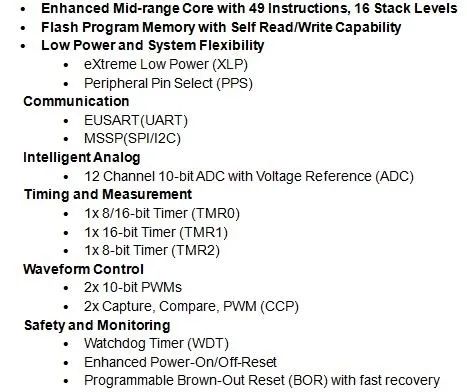
4. 开发工具的配备,其主要内容为:
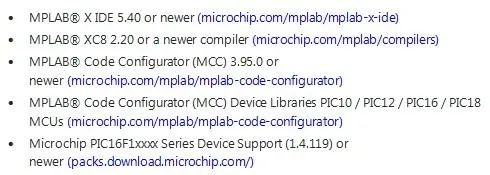
随后的工作就是下载软件来构建开发环境了,由于手头的开发环境是基于MPLAB XIDE 5.30,所以需要重新下载安装MPLAB X IDE 5.40,因为在MPLAB XIDE 5.30下是找不到PIC16F15244,这一点似乎不如KEIL,如果能下载个升级包把问题解决了多好!
2、[PIC/AVR MCU] 【CuriosityNano测评报告】+初次上手PIC单片机之PWM呼吸灯用户:南来之风 非常感谢论坛提供了一次难得的初次体验PIC单片机的机会。官网的资料是非常详细的,对于这款Curiosity Nano,建议从Github上开始学起来。 github.com/microchip-pic-avr-examples/pic16f15244-pwm-led-blink
首先是环境的搭建:
正确安装好驱动后,在端口中应该可以看到“Curiosity Virtual COM Port”
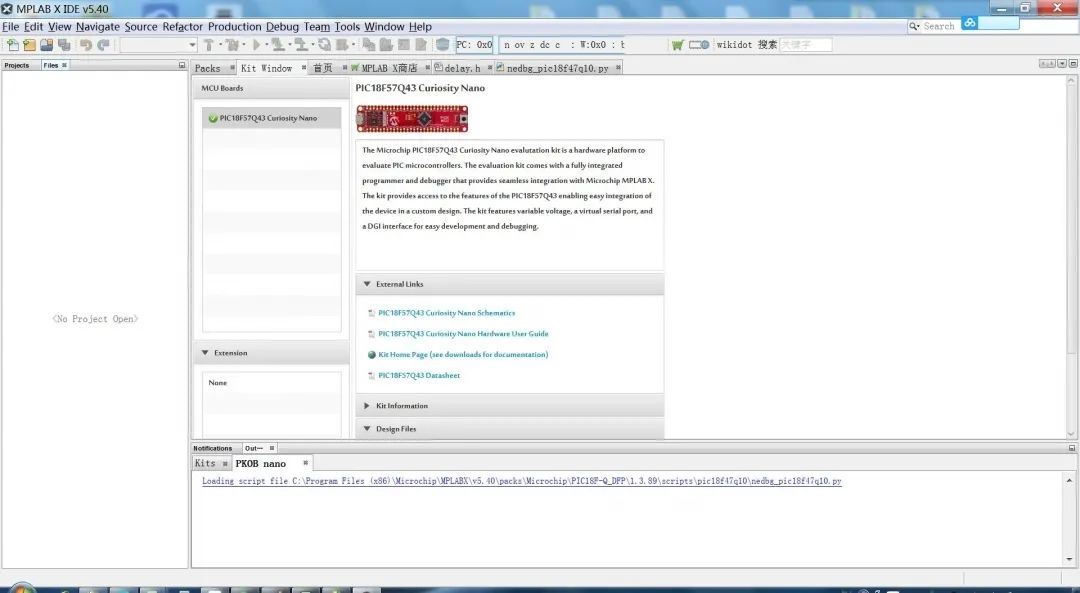
开发环境安装好后,首先打开MPLAB XIDE5.40,软件是自动识别我们这款板子,而且硬件资料,软件demo一应俱全,非常的便利!
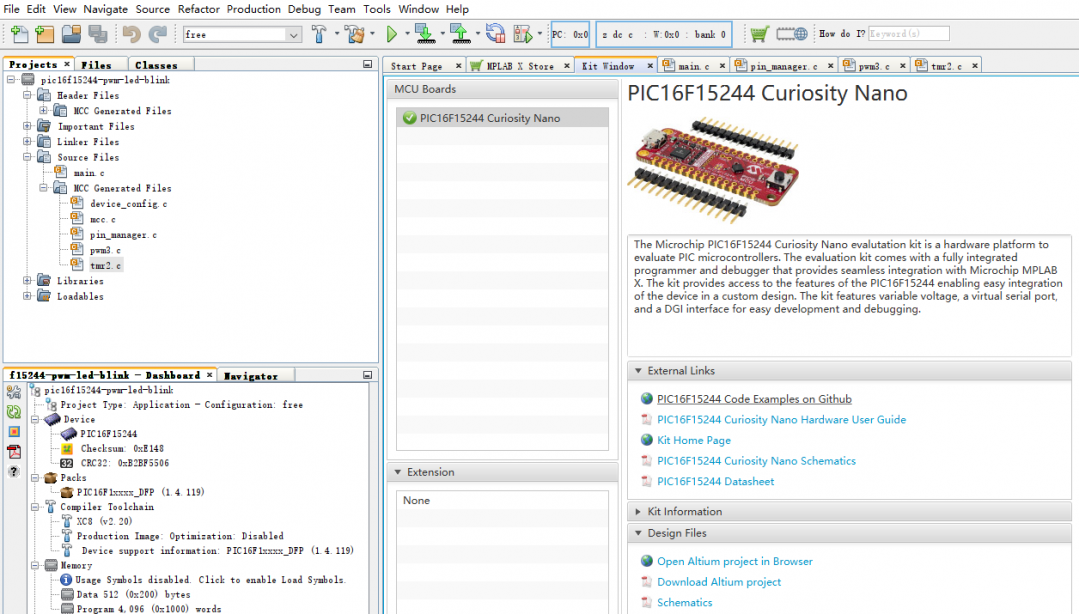
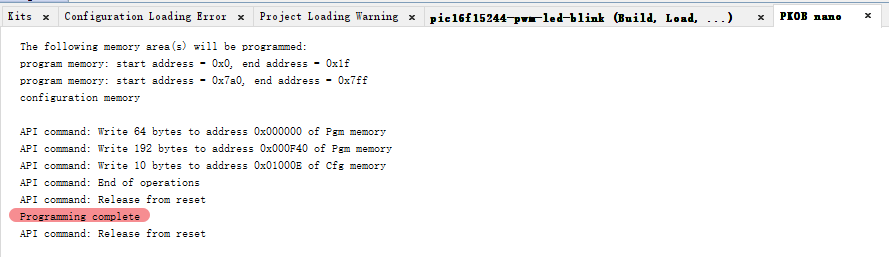
转到Git上,试着运行一个pwm-led-blink-master的项目,下载后先build一个工程。
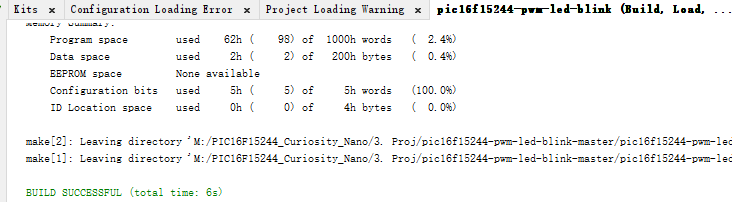
成功后,把程序下载到板子上。
与此同时,把GND和RA2引脚引出,连接到一个简易示波器的输入端,可以看到PWM的方波驱动LED闪烁,在简易示波器上显示出响应的波形。
在例程的基础上,增加了几个不同占空比的值,目前占空比可以选择0,12,25,37,50,62,75,88,100。代码比较糙,但还是贴出来了:
uint16_tArray_dutyCycle[] ={0x0000,0x007F,0x00FA,0x177,0x01F4,0x0271,0x02EE,0x036A,0x03E7};uint16_ti;uint8_tindex =0;int8_tdirection =1;voidmain(void){SYSTEM_Initialize();// Initialize the deviceINTERRUPT_GlobalInterruptEnable();// Enable the Global InterruptsINTERRUPT_PeripheralInterruptEnable();// Enable the Peripheral Interruptswhile(1){if(direction ==1){if(index !=8)PWM3_LoadDutyValue(Array_dutyCycle[++index]);else{direction =-1;PWM3_LoadDutyValue(Array_dutyCycle[--index]);}}else{if(index !=0)PWM3_LoadDutyValue(Array_dutyCycle[--index]);else{direction =1;PWM3_LoadDutyValue(Array_dutyCycle[++index]);}}for(i =5120; i!=0;i--);}}
可以看出PWM的波形占空比变化时候LED0的亮度也随之变化。
3、[PIC/AVR MCU] 【CuriosityNano测评报告】+开箱、建立开发平台及LED闪烁
用户:hu9jj
周末收到本次评测的主角PIC18F57Q43核心板,鲜红的外包装依旧那么惹人喜爱:
两个防静电包装袋中分别是排针和PIC18F57Q43核心板:
核心板上的焊盘依旧的交叉错位,稍加用力将排针插入核心板,就可以直接使用,省略焊接步骤。我之前曾打样了几块扩展板,本次依然派上用场:
上电之后,打开MPLAB X IDE,系统自动识别核心板,通过链接就可以下载PIC18F57Q43的相关资料:
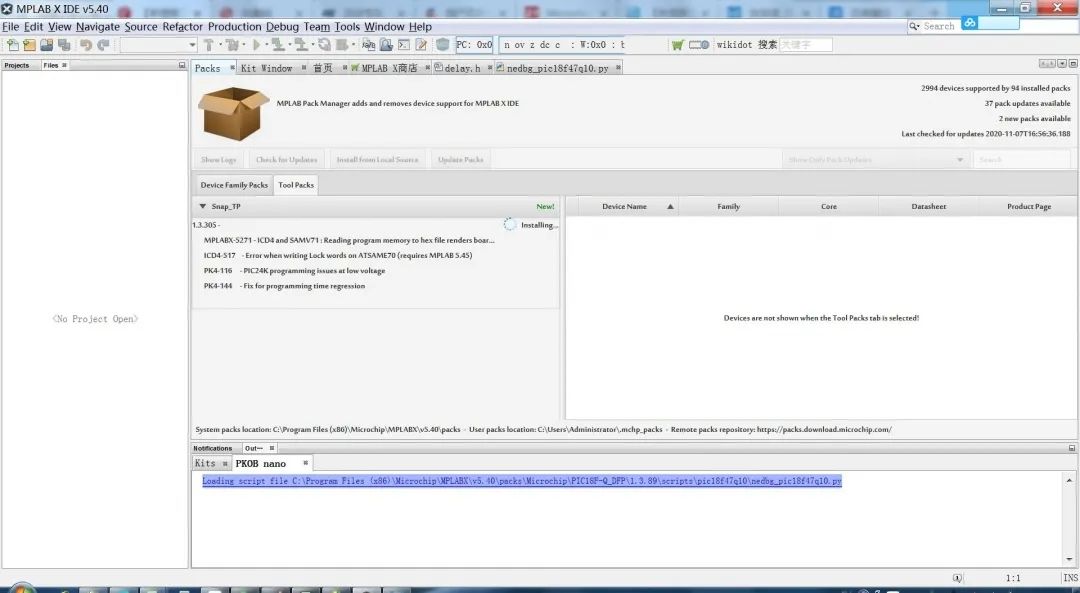
电路图、硬件用户手册及数据表下载完之后,照例先升级PACK包:
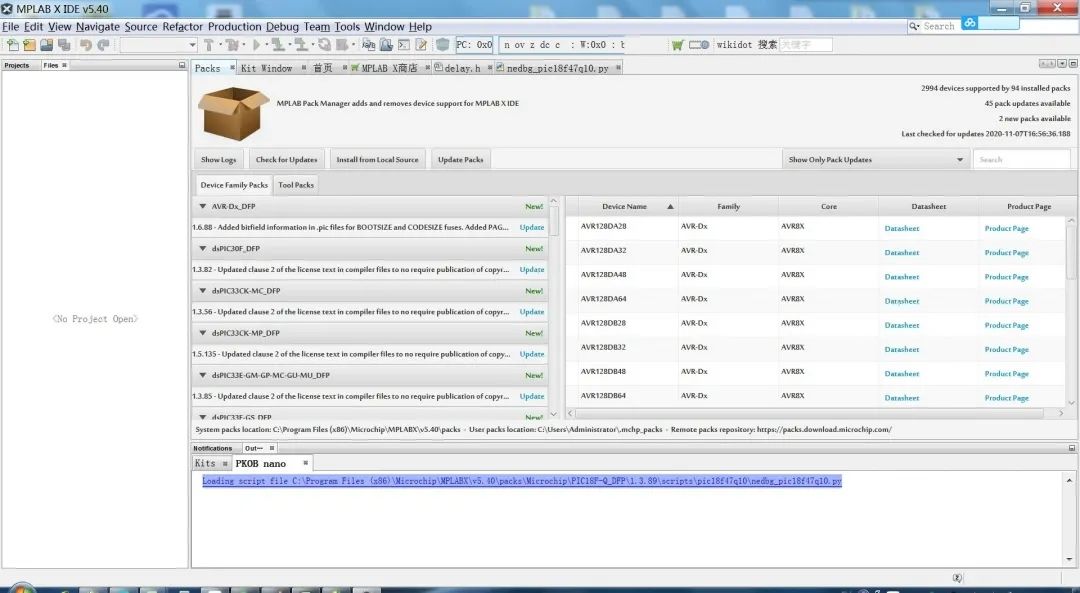
我懒得选择,依次升级了全部PACK,因此花了一个多小时才完成:
准备工作基本完成之后,开始新建项目:
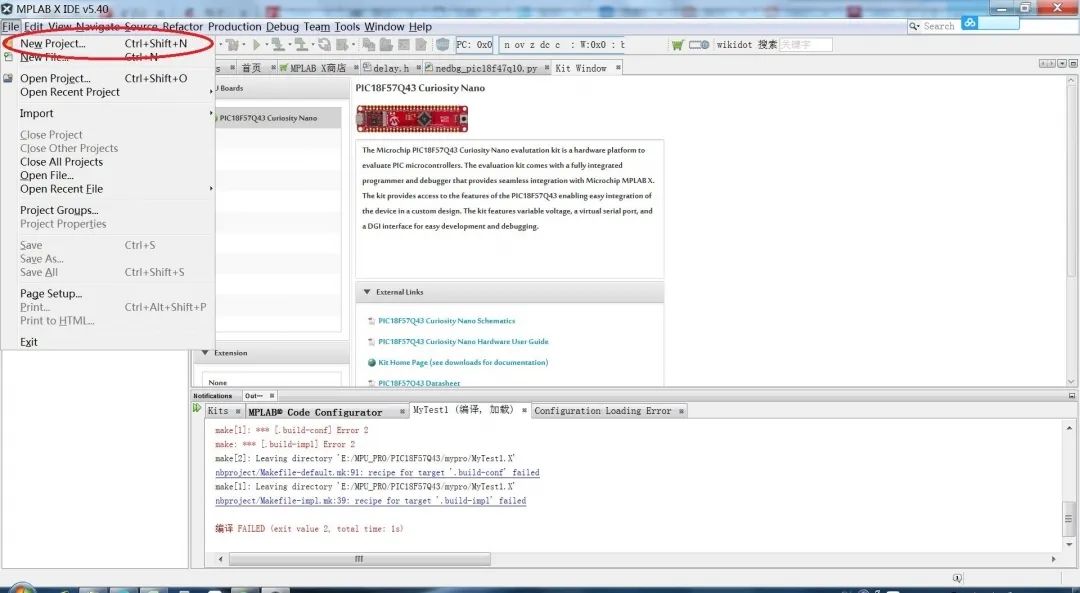
我安装的是中文版IDE,但不知怎么回事,有时菜单不出现中文,不过这无伤大雅,选择“New Project”就是:
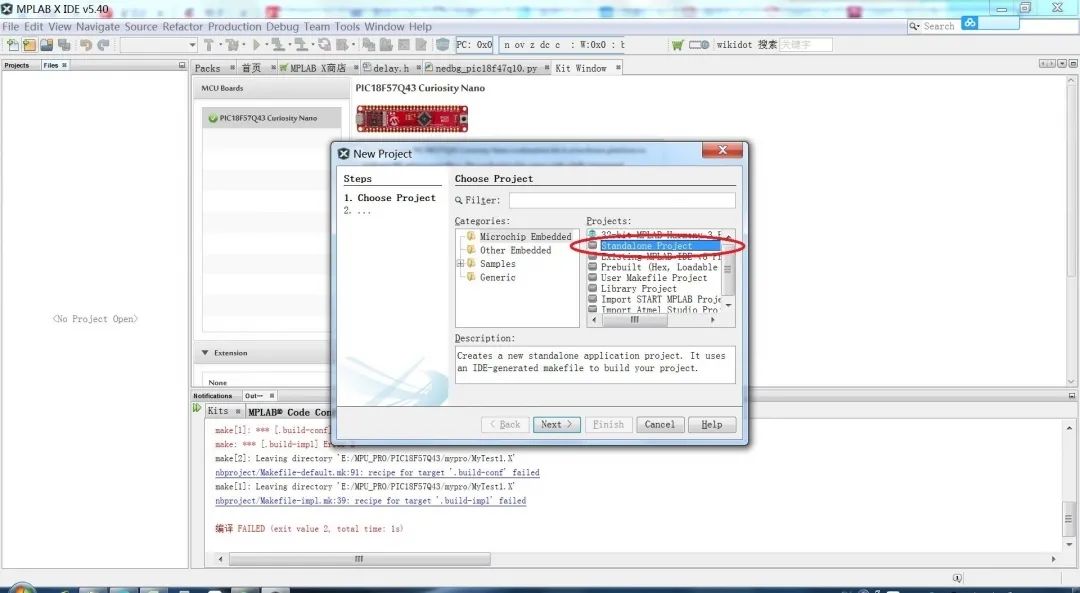
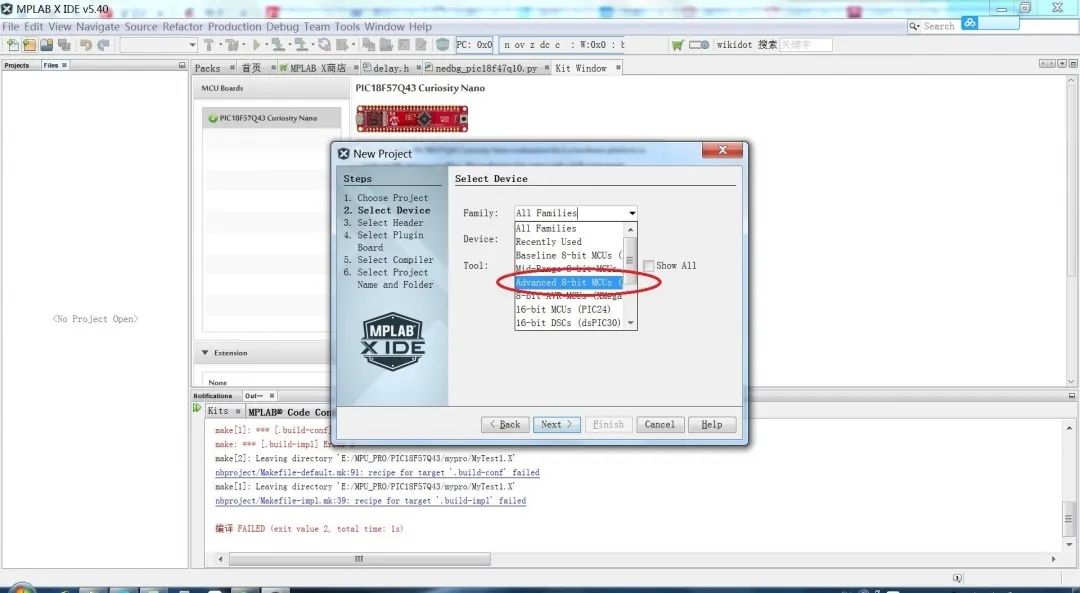
照旧选择标准项目(参见上图),然后进入第二步,选择芯片类别:
类别选择正确之后,在设备栏中输入“PIC18F57",然后从下拉列表框中选择对应的核心板型号,当然,您愿意录入完整的核心板型号也行,然后在工具栏中选择您的核心板编号,这样项目便会与核心板挂钩:
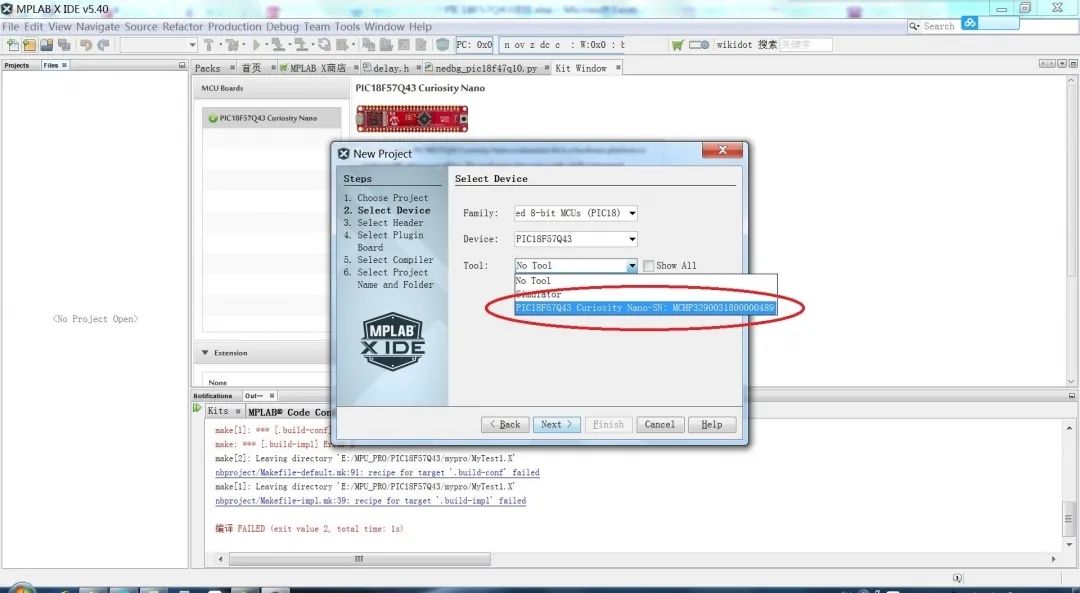
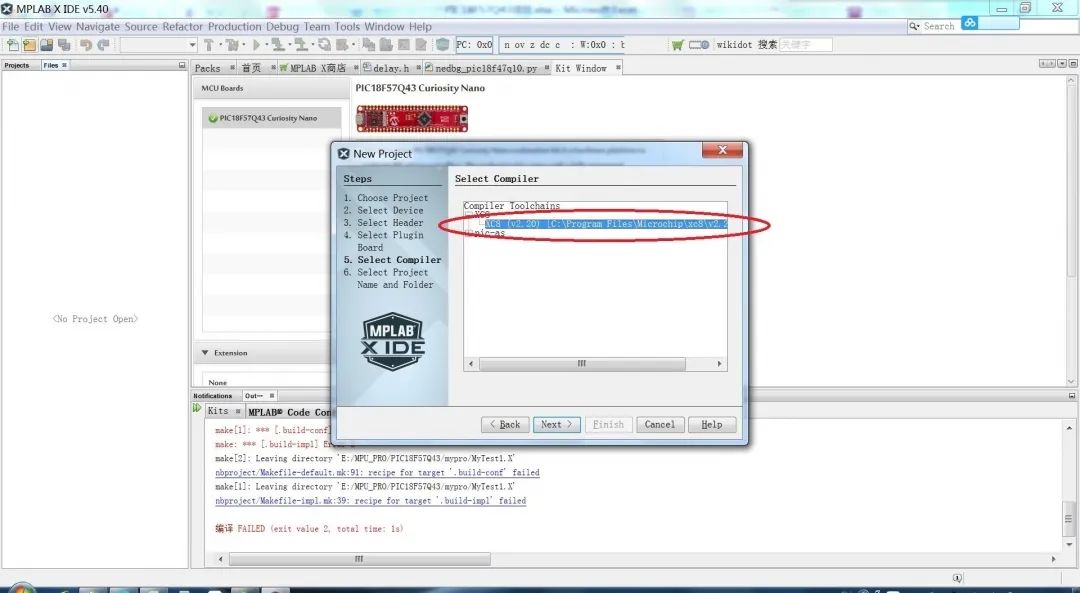
下一步便是选择编译器:
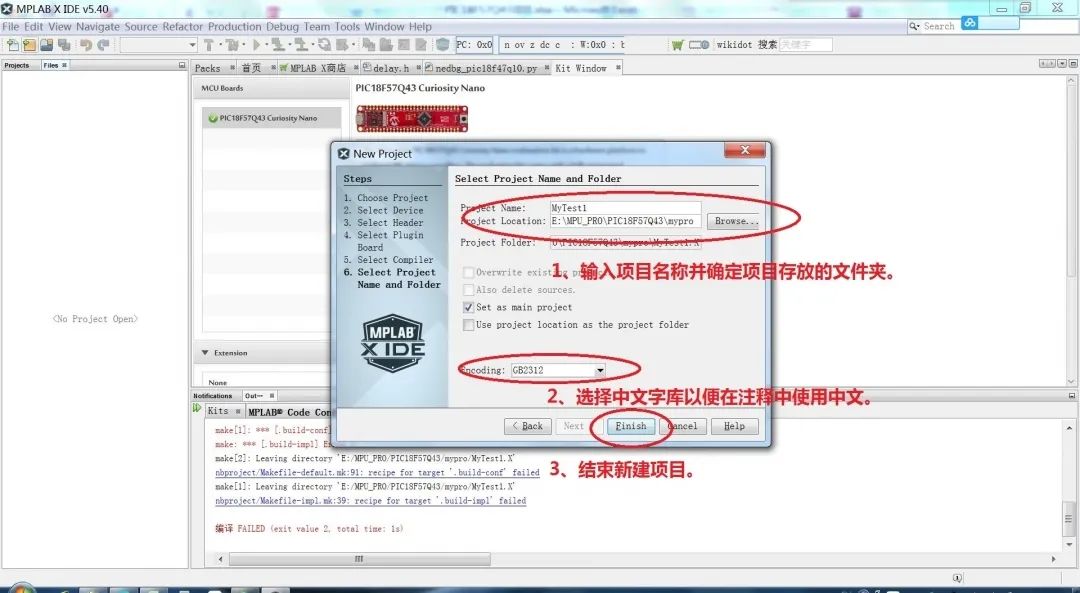
新建项目的最后一步是输入项目名称、选择项目文件存放的位置等:
至此,项目新建完毕,下一步就是通过MCC来配置代码,完善必要的代码文件:
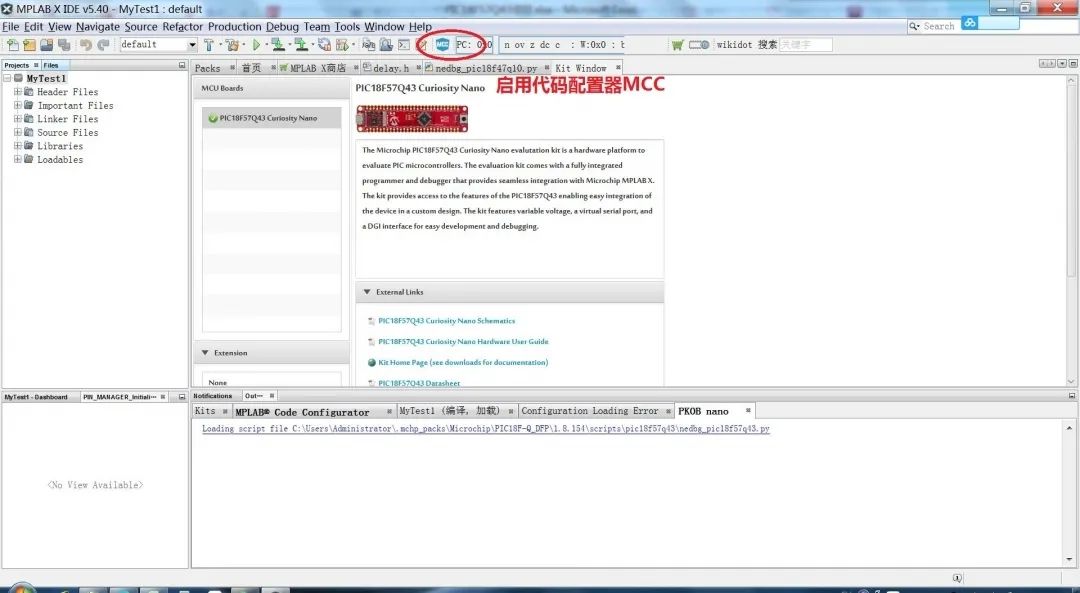
可以从Window下拉菜单中点击进入(或退出)代码配置器MCC,也可以直接点击工具栏上的图标进入或退出MCC:
点击之后,首先需要确定MCC配置文件存放的位置,我通常按默认的位置,直接点击“保存”按钮:
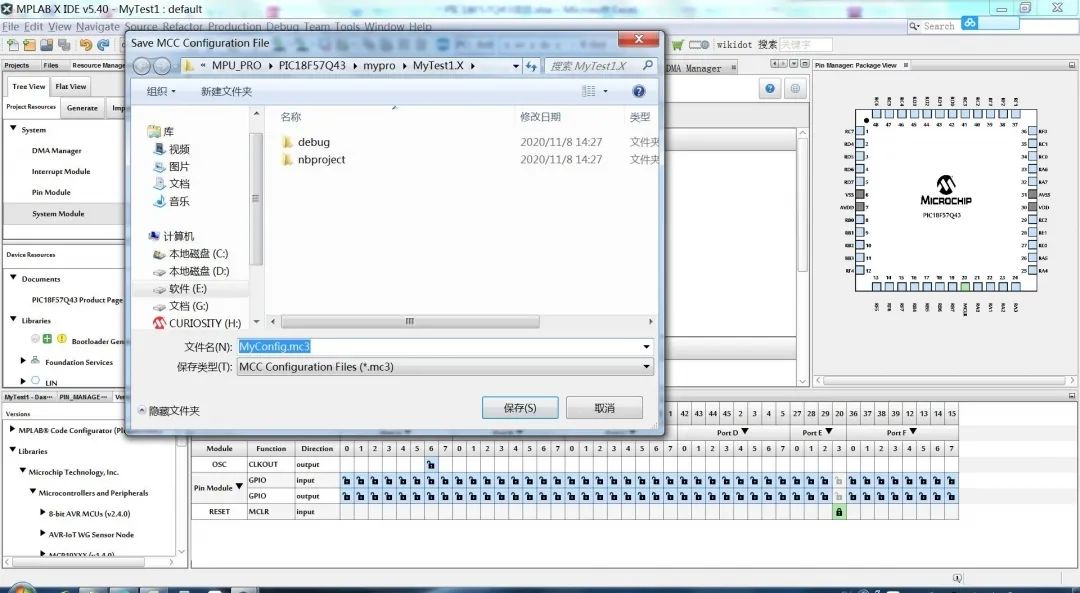
通过下载的电路图,我们知道LED是接在RF3引脚、KEY是接在RB4引脚,因此在引脚图表中将RF3设置成output,将RB4设置成input,为了容易理解,点击右上部分的Pin Module选项,然后在对应引脚的名称设置成KEY和LED:
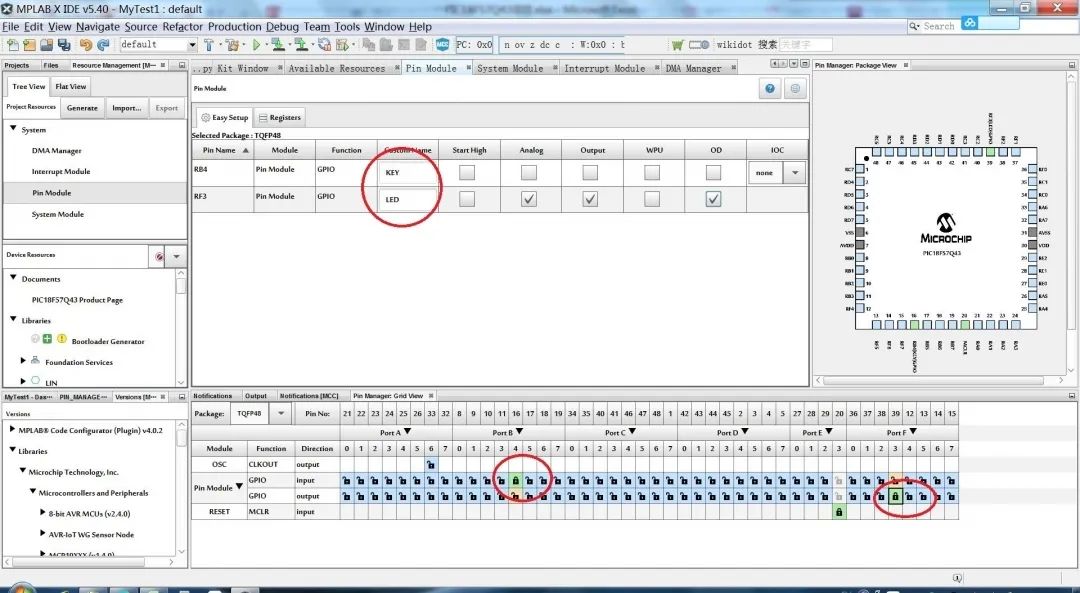
配置完成后,不要忘记点击右上部的"Generate"选项来生成代码:
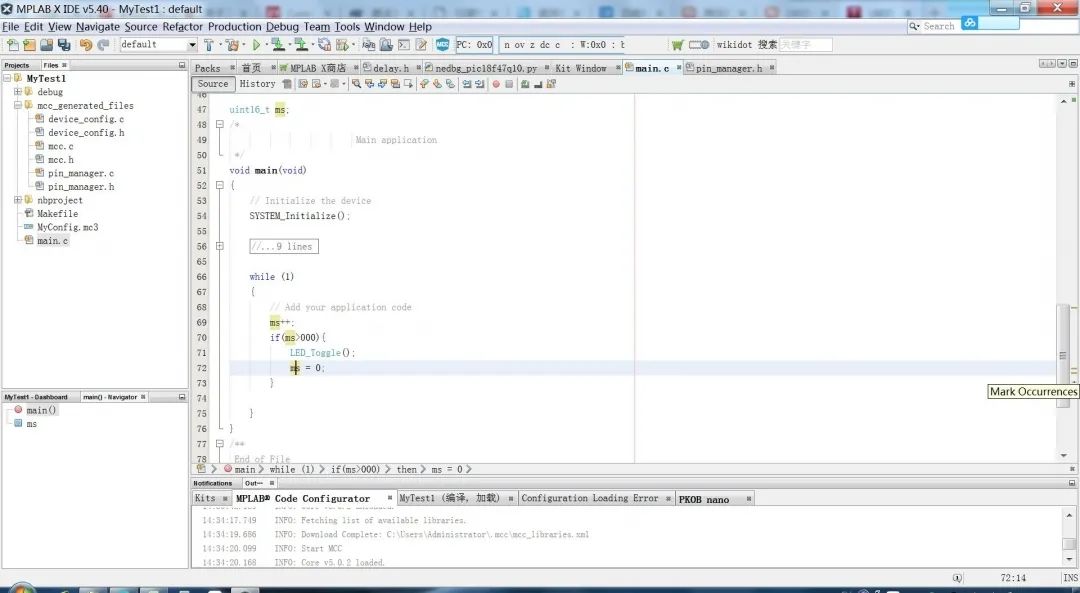
退出MCC之后,打开main.c文件,添加一个计时用的全局变量ms,并在主循环中写入下列代码,用于计时和控制LED引脚电平翻转:
编译并下载程序到核心板上:
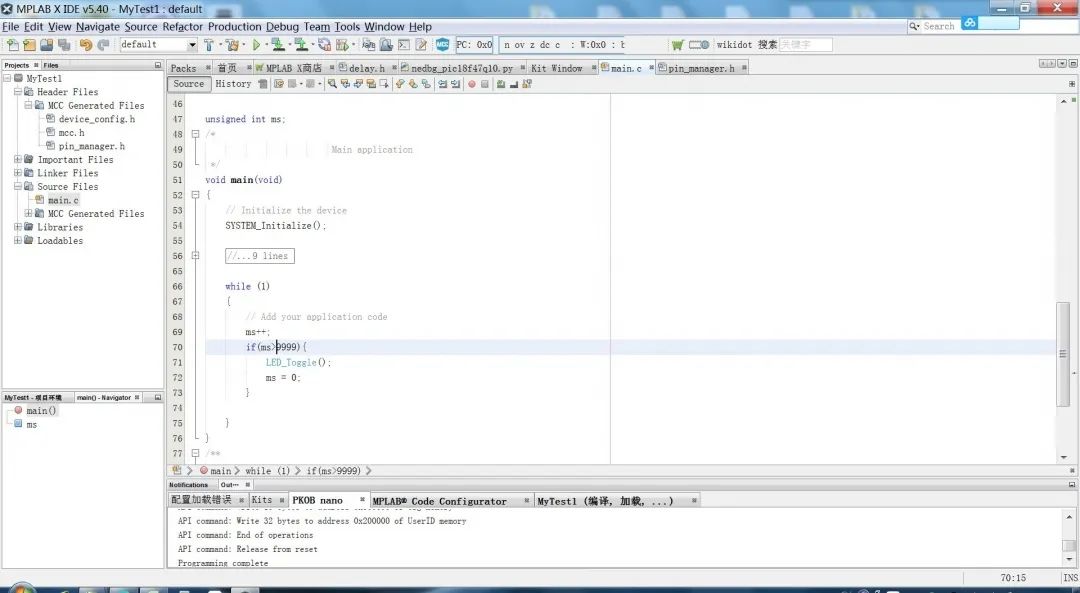
稍等片刻,程序烧录完毕,黄色LED灯便闪烁起来了,开发平台也顺利建立了。
这是测试的动画:
编辑:jq
-
开发STM32需要准备哪些工具呢?2022-01-26 0
-
Microchip推出PIC32蓝牙入门工具包2014-08-07 1413
-
PIC单片机入门与实战-扫描版2016-11-02 1077
-
PIC32MX1/MX2入门开发工具套件2018-06-06 2556
-
PIC32MX入门工具包的详细中文资料免费下载2018-06-14 1468
-
PIC32通用入门工具包开发工具的详细中文资料概述2018-06-13 1277
-
用于实现PIC24F MCU器件的功能和特性的入门工具包详细中文资料概述2018-06-13 882
-
如何使用PIC32MX1/2/5入门工具包在目标板上仿真和调试固件的详细概述2018-06-11 1172
-
如何使用PIC32 USB入门工具包III的详细中文资料概述2018-06-08 1156
-
PIC32 Bluetooth入门工具包的详细中文资料概述2018-06-08 1047
-
PIC32以太网入门工具包的中文介绍和使用的详细概述2018-06-07 1517
-
如何使用PIC32MZ嵌入式连接(EC)入门工具包的详细使用说明2018-06-07 1454
-
PIC32特性及USB入门工具包2018-06-05 767
-
入门51单片机需要准备什么东西2019-08-26 875
-
PIC32入门指南2021-06-02 761
全部0条评论

快来发表一下你的评论吧 !
