

永磁直流电机各种电感的关系及计算
工业控制
描述
永磁直流电机在控制中,经常要用到各种坐标变换,同时也会碰到各种电感,如:相电感、线电感、直轴电感、交轴电感、相间互感等,特别是电感和坐标变换结合后,就有不少人容易混淆迷惑。下面我们用图文及公式方式来理解直流电机电感其中的关系。
电感:1824年,奥斯特发现了电流效应,在通电导体周围的磁针会发生偏转,也就是电生磁,后来,法拉第和亨利发现了磁也能生电,在移动的磁场能会在导体中感应出电流,这就是现在所说的电磁感应,数学工程式为:

e:感应电压
dф/dt:磁通的变化率(单位Wb/s)
法拉第发表电磁感应论文不久,楞次发现了决定感应电流方向的规律,也就是楞次定律:感应电流的磁场总要阻碍引起感应电流的磁通量的变化,所以完整数学公式为:

直流电机中控制中的自感与互感
在安倍定律中:磁场产生的根本原因是电流(可以是导体中的电流,也可以是永磁体中的电流)。如下图所示,一个线圈通电后,就会产生磁场
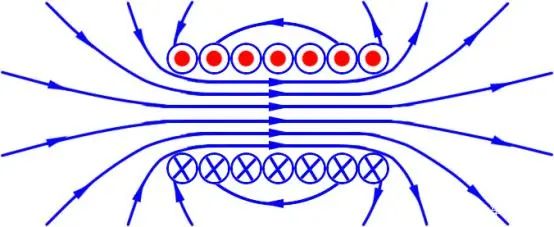
线圈本身就处于自身产生的磁场中,也就意味着线圈中也会产生磁通磁通,这个量对于我们来说不直观,也不好测量,既然磁通是由电流产生的那我们可以借助电流来表示,所以电感的定义是:

单位是Henry(亨利),一位美国物理学家,他其实和法拉第几乎同时独立的发现了电磁感应现象,只不过法拉第更早的发表了成果,就赢得了冠名权。
我们通常说的电感,严格来说应该叫自感,即线圈自己对自己产生磁通的能力。
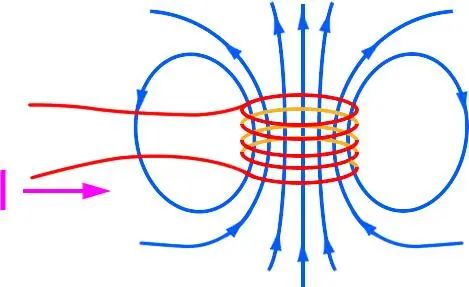
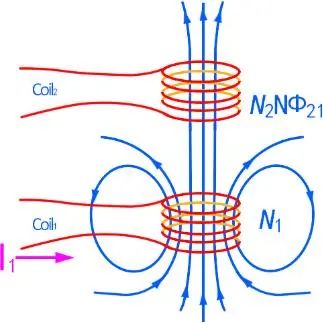
既然有自感,就会有互感,即两个线圈之间互相产生磁通的能力。
在直流电机中,电感非常重要,它表达了在某个特定机构中电流产生的磁场能力,电感确定了,我们就能很容易去研究磁场的性质。
什么是磁动势?
电感的定义是由磁通来定义了,要计算线圈的电感,先就要计算线圈通电后产生的磁场,由此来计算磁链,如,直流电机内磁路为线性,铁芯中的磁滞和涡流损耗可以忽略、气隙磁场的搞次谐波也可忽略,直流电机的定、转子表面光滑,齿、槽影响可以用卡式系数修正,直轴和交轴气隙可以不等,但是气隙的比磁导可以用平均值加二次谐波来表示
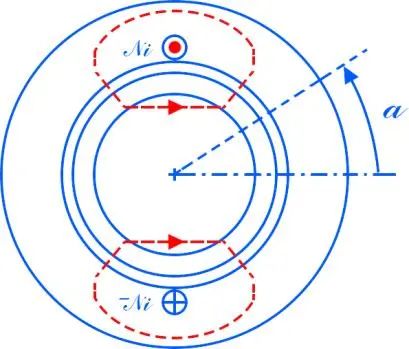
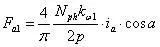
上图为直流电机定子槽内两极整距线圈的情况, ⊙为流出,为流入。根据安培环路定理,其磁动势分布图为:
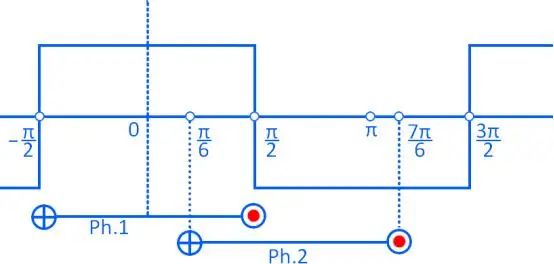
磁动势的幅值为

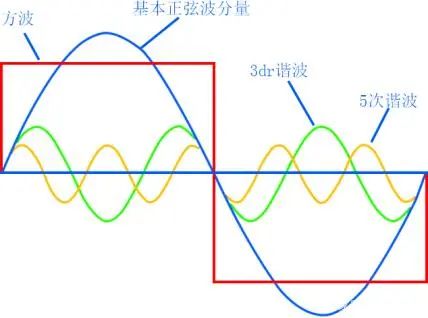
对方波进行傅里叶级数分析,可知其可由1、3、5,...等奇次谐波组成,其中1次谐波也称之为基波,其幅值为:

上面分析的是一对极情况,现在假设是p对极,每相绕组总匝数为Nph,则A相基波幅值为:
上面分析时绕组都认为是整距,且每极每相只有一个槽,实际电机很少这种情况,大多每极下面是多槽的,而且还是短距:
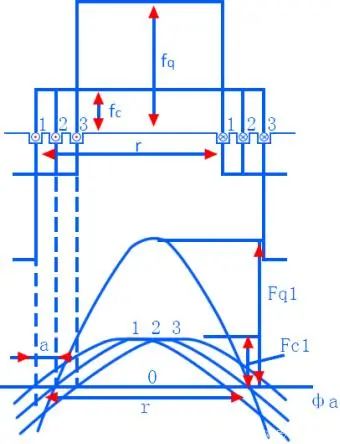
我们一般用一个绕组因数kω1来对基波磁动势进行修正,其幅值为:
直流电机的相电感与互感计算
根据基波磁动势的幅值,则其沿定子分布为:
有了磁势,如果能知道磁导(磁阻的倒数),那就能计算气隙磁密了。对于表贴式直流电机而言,气隙基本不变,因此磁导和直流电机转子的位置没有关系;但是对于直流电机而言,气隙沿转子圆周方向一直变换(变化周期是极对数的两倍),因此磁导还和转子位置相关。
由于dq轴是定义在直流转子上的,因此我们可以通过d轴与A相绕组的夹角θ来表示转子所在的位置。
计算相电感
气隙比磁导为:
λ(a)=λδ0+λδ2cos2(a+θ)
式中因为气隙长度变换周期是极对数的2倍,因此有个2次分量,而且当直流电机类型为内嵌式时, λδ2为负值,即d轴时磁阻最大,磁导最小。
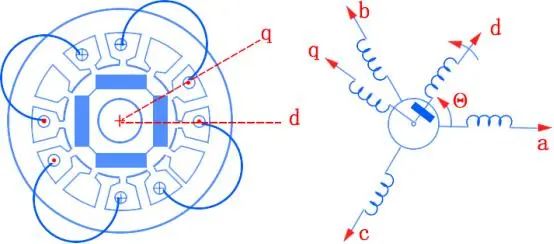
气隙磁动势和比磁导的相位关系为:
则气隙磁密为磁动势乘以比磁导:
Bδ(a)=Fa1cosa·(λδ0+λδ2cos2(a+θ))
展开成谐波叠加的形式:

所以基波气隙磁密为:

则A相绕组对应的磁链为:
其中 Lσ为A相漏感,τ为极距,l 叠片长度,上式整理可得:

进一步整理可得:

所以A相自感为:

即:

换一种表达方式:
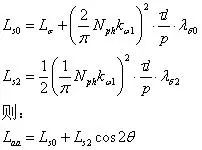
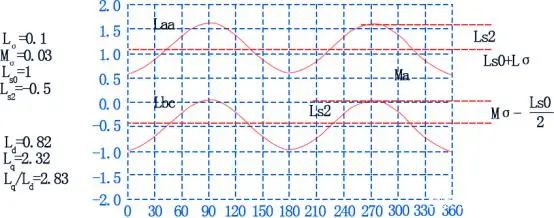
可见,A相绕组的自感不是一个固定值,而是随转子的变换而变化。同理可得其他两相自感为:
Lbb=Ls0+Ls2cos2(θ-2π/3)
Lcc=Ls0+Ls2cos2(θ+2π/3)
计算相间互感
由于B相绕组与A相绕组空间相差120°,其与自感方式基本相同,只需将积分区间由[-π/2 π/2]修改为 [-π/2-2π/3 π/2-2π/3] ,即可以计算A相绕组电流产生的磁场在B相绕组中感应出的磁链,具体为:
其中Mσ为互漏感,可以获得A、B相互感为:
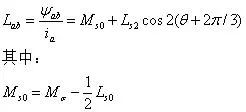
同理可获得其他两相的互感为:
直流电机的自感和互感如下图所示:
如何计算dq轴电感?
一般的直流电机都会用dq轴电感表示,那么问题来了:dq轴电感如何计算或测量?和相电感及互感有什么关系?dq电感和坐标变换有什么关系?
如何确定坐标转换矩阵?
算电感是为了算磁链,进而去计算磁场的某型性质,通过一系列公式,终于把三相绕组的自感和互感计算出来了。
那磁链就可以计算:
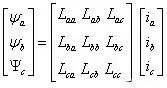
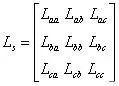
电感矩阵非常复杂:

而且这个电感矩阵还随之直流电机转子的变化而变化着,可以找到一个相似矩阵,这个相似矩阵呢形式比较简单,只有对角线上有数,而且这个相似矩阵能表征原矩阵的关键特征。矩阵对角化本质就是寻找矩阵空间的正交基以及在“基”上的投影系数。那电感矩阵是不是可以进行对角化呢?
可以按照矩阵对角化的步骤:
Del|Ls-λI|=0
可以得到三个特征值,分别是:
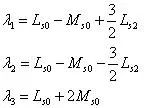
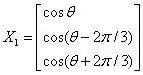
其中特征值λ1对应的特征向量是:
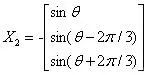
特征值λ2对应的特征向量是:
特征值 λ3对应的特征向量是:

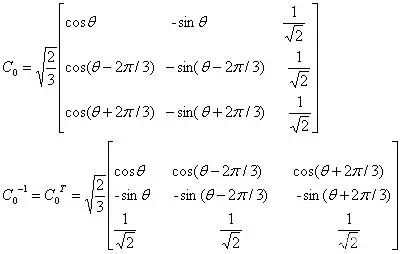
则3个特征向量可以组成如下特征矩阵:
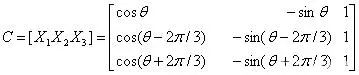
这个特征矩阵就是克拉克变换和帕克变换的乘积,该特征矩阵的逆矩阵为:
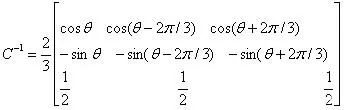
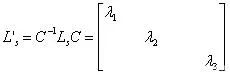
则电感矩阵的特征值可以用特征矩阵及其逆矩阵来计算,即
一般称λ1为Ld;
λ2为Lq;λ3为L0,即:
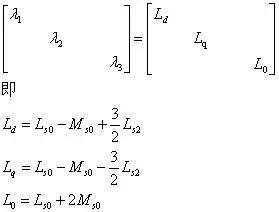
dq轴的电感就是三相绕组电感矩阵的特征值,dq电感是一个常量了,cos2θ等变化因子消失了,也就是说通过对角化(坐标变换),原先较为复杂的电感矩阵对角化和常数化了,是定子的磁链方程解耦了!同时:dq轴电感与变换矩阵无关,是电感矩阵的固有属性。
恒功率变换
在坐标变换的时候,有的变换矩阵前面有个系数2/3 ,有的是

,有的又没有,这到底有什么关系呢?
电压矢量、电流矢量以及磁链矢量的关系为:
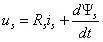
电感对角画的时候求取了变换矩阵C ,现在我们需要把电压矢量、电流矢量以及磁链矢量也进行坐标变换:
Us=Cu’s
is=Ci’s
Ψs=CΨ’s
则变换后的功率为:
P=isTus=(Ci’s)T(Cu’s)=(i’s)T(CTC)u’s
把C 和CT 代入上式,就可以得到:
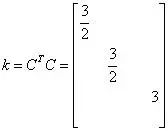
不考虑零轴分量,发现变换后的功率是变换前的3/2倍!也就是说,变换前后功率不守恒了,那通过功率计算的转矩就会不准确了,需要进行修正。
把特征矩阵变为下面这个就可以做到功率守恒
这个矩阵也是最常用的变换矩阵。
dq轴电感测量方法
通过建立直流电机模型,就要知道dq轴电感,两种方式,一种是计算,一种是测量。计算比较容易,建立直流电机的有限元模型,现在的电磁计算软件都有电感矩阵计算功能,计算出来求特征值就行了,有的软件都能直接给出dq轴的电感。
一般来说有2种方式来测电感,一种是通过三相绕组,一种是通过两相绕组。
用三相测dq轴电感
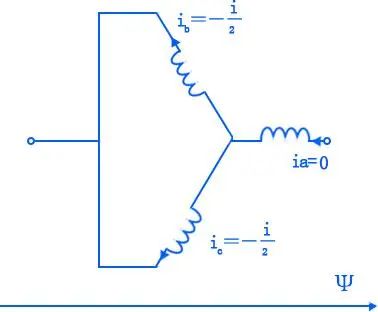
将B、C两相绕组并联在一起,形成一个新的端点,用LCR表或其他装置测量该端点和A相绕组端点之间的电感。
此时因为:
B相绕组和C相绕组并联,具有相同的磁链,因此只计算B相绕组的磁链:
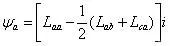
则总的磁链为:
Ψ=Ψa-Ψb
则等效电感为:

当θ=0时:
当θ=±π/2时:

可见,当直流电机转子合适的位置测电感时,可以分别获得d轴电感和q轴电感。但是这种方法有一个难点就是如何知道转子此时的位置,一个近似的测法是缓慢的旋转转子,记下电感的最大值和最小值,此时:
用两相测dq轴电感
用两相绕组也可以直接测量,比如直接测量B、C两相端部之间的电感。
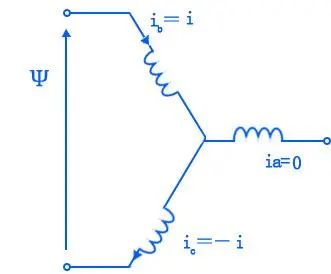
此时,B相绕组的磁链为:
Ψb=(Lbb-Lbc)i
B相绕组的磁链为:
Ψc=(Lbc-Lcc)i
总的磁链为:
Ψ=Ψb-Ψc
等效电感为:

同样,缓慢的旋转直流电机转子,记下电感的最大值和最小值,此时:
由于直流电机是比较复杂的电磁产品,里面电感构型比较复杂,既有自感又有互感,电感之间既有并联,也有串联,电感串联和并联的特性非常重要
同向串联电感

上图描述了两个绕向相同的电感串联时的模型,其中用黑点表示绕组电流流入方向,电流和磁链方向如图所示。
第一个电感产生的总磁链为:
Ψ1=L1i1+|M|i2
第二个电感中产生的总磁链为:
Ψ2=L2i2+|M|i1
两个电感中的电流方向相同:
i1=i2
两个电感等效成一个电感时,总的磁链为:
Ψ=Ψ1+Ψ2=(L1+L2+2|M|)i
则等效电感为:
反向串联电感

此时两绕组绕向相反,由于定义的电流正方向为绕组的流入方向,在此规定下,两绕组的电流数值关系是:
i1=-i2
所以总的等效磁链为:
Ψ=Ψ1-Ψ2=(L1+L2-2|M|)i
则等效电感为:
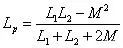
同向并联电感
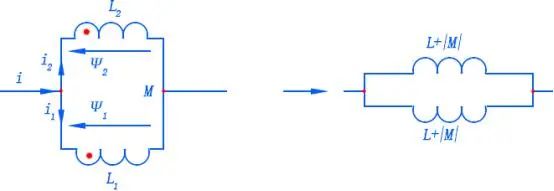
两个电感并联时是比较反直觉的,下面我们就来仔细分析一下。上图是绕向相同的两个电感并联时情况,此时,由基尔霍夫电压定律每个电感两端的电压应该是一致的。即:
对于第一个电感:
对于第二个电感:
由基尔霍夫电流定律:
i=i1+i2
整理可得:
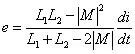
所以等效电感为:
反向并联电感
两电感方向绕向相反,则根据基尔霍夫电压定律:

由基尔霍夫电流定律:
i=i1-i2
可计算的等效电感为:
简单来说:
当两电感串联时:Ls-L1+L2±2M ,绕向相同时为+,绕向相反时为-;
当两电感并联时:
,绕向相同时为+,绕向相反时为 -。
-
无刷直流电机电感问题2015-01-27 0
-
永磁无刷直流电机与永磁同步电机有哪些不同点啊2021-08-12 0
-
永磁无刷直流电机设计-英文2016-12-13 1084
-
无刷永磁直流电机的绕组参数计算_郑柒拾2017-05-25 2160
-
永磁无刷直流电机技术PDF电子书免费下载2020-05-11 3229
-
永磁直流电机的原理和设计与定制2022-02-22 4497
-
永磁直流电机的原理2021-01-21 3524
-
永磁无刷直流电机简介2021-09-15 1403
-
永磁无刷直流电机的优缺点2021-09-15 2866
-
永磁无刷直流电机2021-09-15 1375
-
什么是直流电机 直流电机的励磁方式2023-03-01 5067
-
永磁有刷直流电机的基础知识2023-03-23 4451
-
直流电机emf怎么计算2023-12-15 2635
-
永磁无刷直流电机的控制方法2024-06-03 1353
-
直流电机主要种类有哪些?直流电机的励磁方式有哪些?2024-10-22 548
全部0条评论

快来发表一下你的评论吧 !
