

新能源汽车VCU电控开发——能量回收模块
描述
一、概述
VCU(Vehicle Control Unit,整车控制器)能量回收功能是新能源汽车(如纯电动汽车和混合动力汽车)中非常重要的一个环节。它主要是在车辆减速或制动过程中,将车辆的部分动能转化为电能,并存储在电池中,从而提高车辆的能量利用效率。能量回收的本质是根据整车状态计算出能量回收扭矩(TER,TorqueEnergyRecovery并进行输出,可分为能量回收使能(EnergyRecycleEnable)、能量回收扭矩请求(EnergyRecycleTorqueRequest)和能量回收扭矩限制(EnergyRecycleTorqueLimit)三个子模块。

能量回收使能模块是指 VCU 根据整车上电状态、车速、挡位、电池 SOC 值、ABS 状态、加速踏板状态和刹车状态等来判断是否进行能量回收;能量回收扭矩请求模块是指 VCU确定进行能量回收后,根据能量回收等级、能量回收模式、当前车速和挡位计算出的能量回收扭矩值;能量回收扭矩限制模块主要从 DCDC 和电池所允许的最大充电功率、电机特性两个方面对能量回收扭矩进行限制。
二、术语及缩写
| 英文缩写 | 英文全称 | 中文名称 |
| VCU | Vehicle Control Unit | 整车控制器 |
| BMS | Battery Management System | 电池管理系统 |
| MCU | Motor Control Unit | 电机控制单元 |
| ESC | Electronic Stability Program | 电子稳定系统 |
| GSM | Electronic Gear Select Module | 电子换挡器 |
| OBC | On-Board Charger | 车载充电机 |
| BCM | Body Control Management | 车身控制系统 |
| OBD | On-Board Diagnostics | 车载诊断系统 |
| DCDC | Direct Current Direct Current | 直流-直流转换器 |
| T-BOX | Telematics BOX | 远程信息处理器 |
| EPS | Electric Power Steering | 电动助力转向 |
三、功能要求
VCU 能量回收功能规范的功能要求通常包括以下几个方面:能量回收策略制定与执行、能量回收效率优化、系统协同与安全保障
1)能量回收策略制定与执行
滑行能量回收:当驾驶员松开加速踏板,车辆进入滑行状态时,VCU 应能根据车速、电池 SOC(State of Charge,荷电状态)等条件判断是否开启能量回收。例如,在较高车速下(如大于 30km/h),如果电池 SOC 低于设定阈值(如 80%),则开启一定强度的滑行能量回收。回收强度可以根据车辆的设计和驾驶模式的不同而有所变化,一般可以通过调整电机的发电扭矩来实现不同程度的能量回收。
制动能量回收:在车辆制动过程中,VCU 需要协调制动系统和驱动电机,实现制动能量回收。它要区分机械制动和电制动的比例,这通常通过制动踏板传感器来获取制动意图。例如,在轻踩制动踏板时,优先使用电制动进行能量回收;当制动踏板行程较大,需要更大的制动力时,机械制动和电制动同时工作,并且随着制动强度的增加,机械制动的比例逐渐增大,电制动的比例相应减小,以保证车辆的制动安全。
2)能量回收效率优化
VCU 应确保能量回收系统具有较高的回收效率。这涉及到电机的发电效率、传动系统的能量传递效率以及电池的充电效率等多个环节。例如,电机在发电过程中会有能量损耗,一般高效的电机发电效率能达到 80% - 90% 左右。VCU 需要通过优化控制策略,如调整电机的转速 - 扭矩工作点,使电机工作在高效发电区域,从而提高整体的能量回收效率。同时,传动系统的设计也很关键,低摩擦的传动部件有助于减少能量损失。
3)系统协同与安全保障
与动力系统协调:VCU 要与驱动电机紧密配合。在能量回收过程中,驱动电机从驱动状态切换到发电状态,VCU 需要准确控制电机的扭矩反转时间和大小。例如,在从加速状态突然转换到滑行能量回收状态时,VCU 要确保电机扭矩的平稳过渡,避免车辆出现顿挫感。同时,对于混合动力汽车,还需要协调发动机和电机之间的工作模式,当发动机工作时,也要考虑如何合理地利用电机进行能量回收。
与电池管理系统协调:能量回收的电能要存储到电池中,VCU 需要和电池管理系统(BMS)通信。BMS 负责监控电池的状态,如电池温度、SOC 等。VCU 在进行能量回收时,要根据 BMS 提供的信息,判断电池是否能够接收回收的电能。例如,如果电池温度过高(如超过 45℃)或者 SOC 已经接近满电状态(如大于 95%),VCU 应该减少或停止能量回收,以保护电池的安全和寿命。
四、系统组成
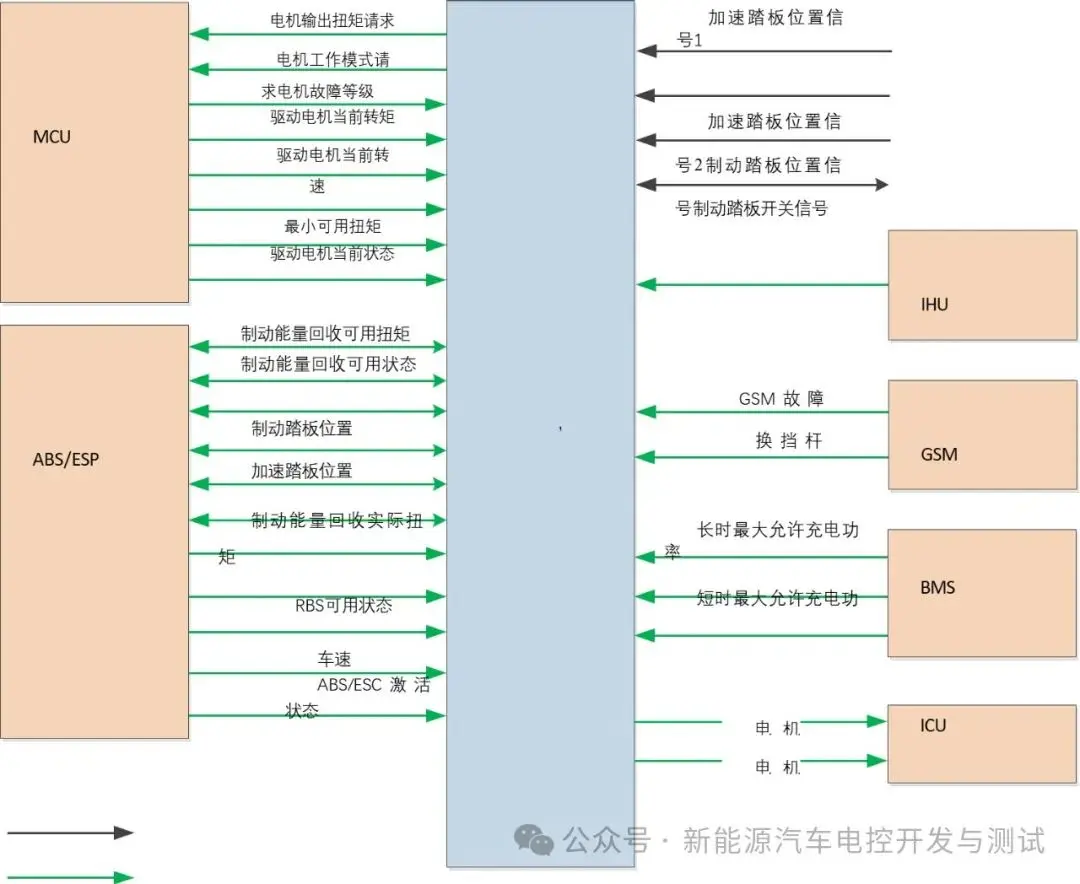
硬线信号
总线信号
部件功能说明
| 序号 | 部件名称 | 部件功能描述 |
| 1 | VCU | 接收档位信号,加速踏板行程信号,制动踏板开关信号,制动踏板位置信号与 BMS 反馈的高压电池系统状态,计算最大回馈扭矩,并通过总线发送至ABS/ESC |
| 2 | BMS | 通过CAN 总线向VCU 反馈高压电池系统电压,SOC,最大充电电流等参数 |
| 3 | MCU | 执行VCU 请求扭矩,发送当前电机状态 |
| 4 | GSM | 发送换挡杆位置信息 |
| 5 | ICU | 接收VCU 发送电机功率信号并进行指示 |
| 6 | ABS/ESC | 根据VCU 反馈的系统回收能力参数,执行制动扭矩分配,计算电机回馈扭矩并发送至总线 |
| 7 | IHU | 驾驶员能量回收开关请求 |
4.1能量回收功能
4.11滑行能量回收
接口信号
1)输入量
| 信号名称 | 通讯矩阵信号名称 | 信号描述 | 信号类型 |
| VeCANR_b_RgnSwtch | IHU_Regen_Switch | 能量回收开关 | CAN 信号 |
| VeCANR_b_RgnSwtchVld | IHU_Regen_Switch_Valid | 能量回收控制开关有效性信号 | CAN 信号 |
| VeSGCR_b_AccnPedSt | --- | 加速踏板开度 | 内部信号 |
| VeSGCR_pct_BrkPed | --- | 制动踏板开度 | 内部信号 |
| VeSGCR_b_BrkPedSt | --- | 制动踏板状态 | 内部信号 |
| VeGRMR_st_GrPstnOut | VCU_ActualGearPosition | 实际档位状态 | CAN 信号 |
| VeSGCR_v_VehSpd | --- | 车速 | 内部信号 |
| VeCRUR_st_CruzMode | --- | 定速巡航模式 | 内部信号 |
| VeTQRR_b_ACCTqCtrlActv | --- | ACC 功能激活 | 内部信号 |
| VeTQRR_b_PASTqCtrlActv | --- | 自动泊车功能激活 | 内部信号 |
| VeCANR_trq_MtrMinAvlTq | MCU_MinAvlTq | 电机最小可用扭矩 | CAN 信号 |
| VeCANR_Pwr_BatMaxChrgInstns | BMS_AllowedMaxPeakFBPower | 电池峰值回收功率 | CAN 信号 |
2)输出量
| 信号名称 | 信号描述 | 信号类型 |
| VeTQRR_trq_CstTqReq | 滑行需求扭矩 | 内部信号 |
3)标定量
| 信号名称 | 信号描述 | 初始值(时间单位默认10ms) |
| KeTQRR_Pwr_RgnAllwThres | 回收允许电池功率阀值 | 20KW |
| KeTQRR_trq_RgnAllwThres | 回收允许电机扭矩阀值 | 80Nm |
| KeTQRR_v_CstRgnEntSpd | 滑行回收进入车速 | 8Km/h |
| KeTQRR_v_CstRgnExtSpd | 滑行回收退出车速 | 7Km/h |
| KaTQRR_v_CstTqX | 滑行扭矩 X 轴(车速) | --- |
| KaTQRR_trq_CstTqMap | Nrm 模式滑行扭矩 Map | --- |
| Nrm | 值 | |
| KaTQRR_trq_CstTqMapEco | Eco 模式滑行扭矩 Map值 | --- |
| KaTQRR_trq_CstTqMapSpt | Spt 模式滑行扭矩 Map值 | --- |
| KeTQRR_trq_CstBscTq | 滑行基础扭矩 | 0Nm |
| KaTQRR_fac_CstNom | Nml 模式滑行回收系数 | 1 |
| KaTQRR_fac_CstEco | Eco 模式滑行回收系数 | 1 |
| KaTQRR_fac_CstSpt | Spt 模式滑行回收系数 | 1 |
| KeTQRR_Pct_RgnBtSOCTres | 能量回收的电池包 SOC阀值 | 98% |
滑行扭矩控制
滑行能量回收扭矩根据车速查表获得,在不同车辆模式下,需查不同的 Map以保障不同的动力性和经济性需求。为保证驾驶平顺性,低车速时回收扭矩较小,随车速增大回收扭矩逐渐增大,车速达到一定值后,滑行能量回收扭矩不再增大(滑行能量回收 Map 中体现)。
4.12制动能量回收
接口信号
1)输入量:
| 信号名称 | 通讯矩阵信号名称 | 信号描述 | 信号类型 |
| VeCANR_b_RgnSwtch | IHU_Regen_Switch | 能量回收开关 | CAN 信号 |
| VeSGCR_pct_BrkPed | --- | 制动踏板开度 | 内部变量 |
| VeSGCR_b_BrkPedSt | --- | 制动踏板状态 | 内部信号 |
| VeGRMR_st_GrPstnOut | --- | 档位信号 | 内部信号 |
| VeSGCR_v_VehSpd | --- | 车速 | 内部信号 |
| VeCANR_trq_MtrMinAvlTq | MCU_MinAvlTq | 电机最小可用扭矩 | CAN 信号 |
| VeCANR_Pwr_BatMaxChrgInstns | BMS_AllowedMaxPeakFBPower | 电池峰值回收功率 | CAN 信号 |
| VeCANR_b_RBSActv | ABS_RegenBrakeCtrlStatus | RBS 功能激活 | CAN 信号 |
| VeCANR_trq_MtrTq | MCU_MotorPresentTorque | 电机扭矩 | CAN 信号 |
2)输出量:
| 信号名称 | 通讯矩阵信号名称 | 信号描述 | 信号类型 |
| LeTQRR_trq_BrkTqReq | -- | 制动需求扭矩 | 内部信号 |
| VeTQDR_trq_MtrRgnTqMax | VCU_MotorOutputMinTqReq | 电机回收可用扭矩 | CAN 信号 |
3)标定量:
| 信号名称 | 信号描述 | 初始值(时间单位默认10ms) |
| KeTQRR_Pwr_RgnAllwThres | 制动允许功率阀值 | 20KW |
| KeTQRR_trq_RgnAllwThres | 制动允许扭矩阀值 | 80Nm |
| KeTQRR_v_BrkEntSpd | 制动回收进入车速 | 7Km/h |
| KeTQRR_v_BrkExtSpd | 制动回收退出车速 | 1Km/h |
| KeTQRR_Pct_RgnInBtSOCTres | 能量回收允许的电池包SOC 阀值 | 98% |
| KeTQRR_Pct_RgnExBtSOCTres | 能量回收退出的电池包SOC 阀值 | 99% |
4.2matlab搭建模型
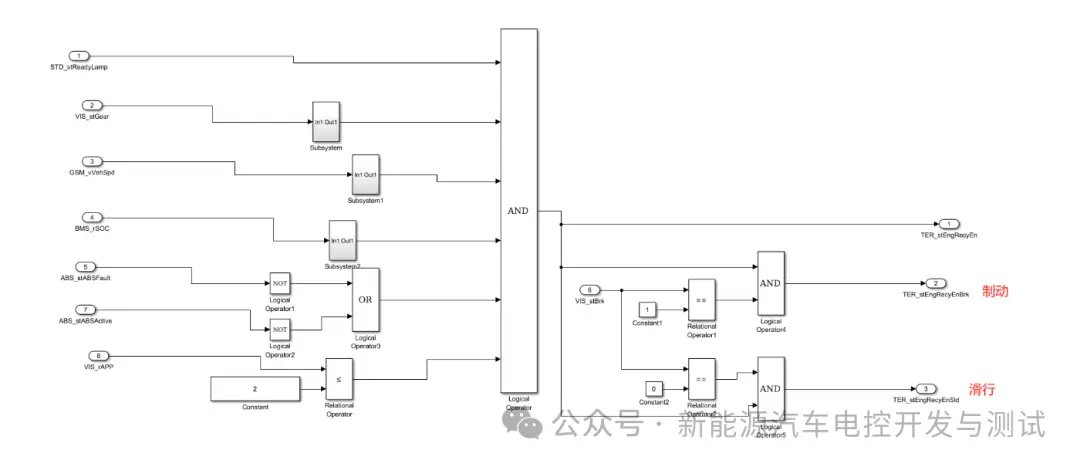
根据功能规范我们在Simulink中搭建模型
能量回收触发条件模型:
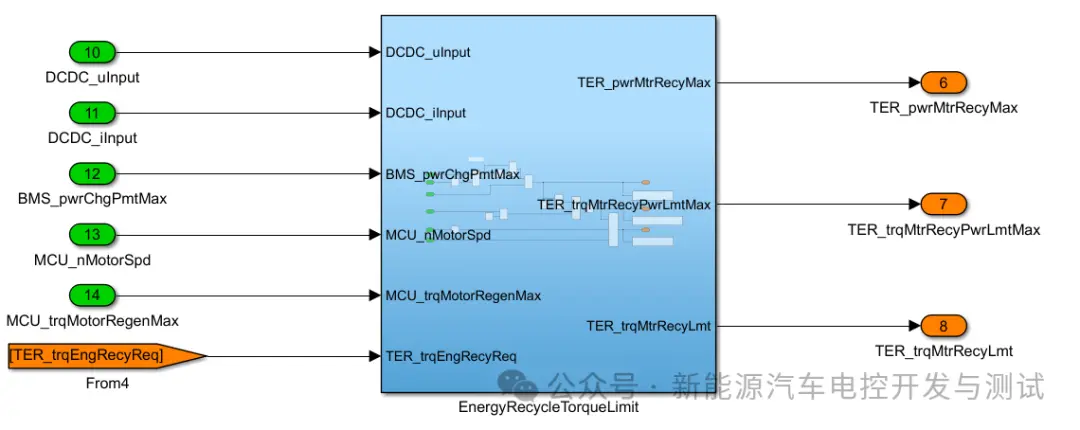
能量回收限制模块模型:
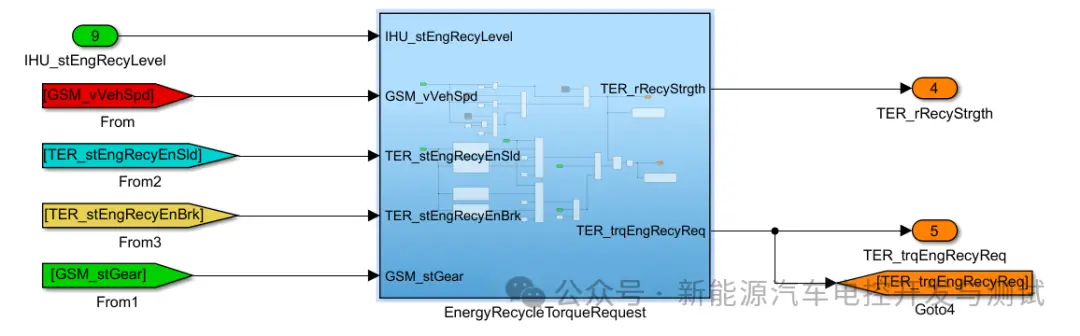
能量回收计算模块模型:
来源:新能源汽车电控开发与测试
-
新能源汽车核心技术详解:电池包和BMS、VCU、 MCU2017-08-11 0
-
新能源汽车回收业务|新能源汽车电池包回收|新能源汽车电池模组回收|库存新能源汽车回收|新能源汽车高价回收2021-09-14 0
-
回收新能源汽车电池包,回收新能源汽车电池 回收新能源汽车18650电池组 回收新能源汽车软包电池组2021-09-24 0
-
长期合作,库存新能源汽车回收2021-09-29 0
-
各种电动汽车回收,各种新能源汽车回收,各种新能源汽车回收,各种新能源汽车电池模组回收2021-10-02 0
-
回收新能源汽车电池包,回收新能源汽车电池 , 回收新能源汽车,18650电池组回收2021-12-02 0
-
回收新能源汽车,回收电动汽车,回收新能源汽车电池模组,回收新能源汽车电机, 回收新能源汽车软包电池组2021-12-13 0
-
分析新能源汽车再生能量回馈2017-11-20 1040
-
能量回收 对于电动汽车有很大的意义2019-03-02 7299
-
新能源汽车电控系统VCU开发平台的组成结构2020-06-18 2570
-
电机能量回收原理2023-08-29 5000
-
电动汽车制动能量回收系统的工作原理、组成、实现过程及优缺点2023-10-30 12173
-
新能源汽车馈能减振器方案设计2023-12-15 571
全部0条评论

快来发表一下你的评论吧 !
