 德赢Vwin官网
App
德赢Vwin官网
App


焊接机器人的工作原理是怎样的?焊接机器人是用于焊接作业的自动化机械设备,用户在焊接工作中如何掌握好焊接机器人的工作原理,可以帮助在焊接工作中稳定焊接质量,提高焊接效率,明确产品的生产周期,青岛赛邦带您了解。
焊接机器人的工作原理:
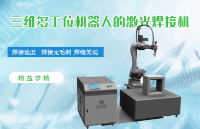
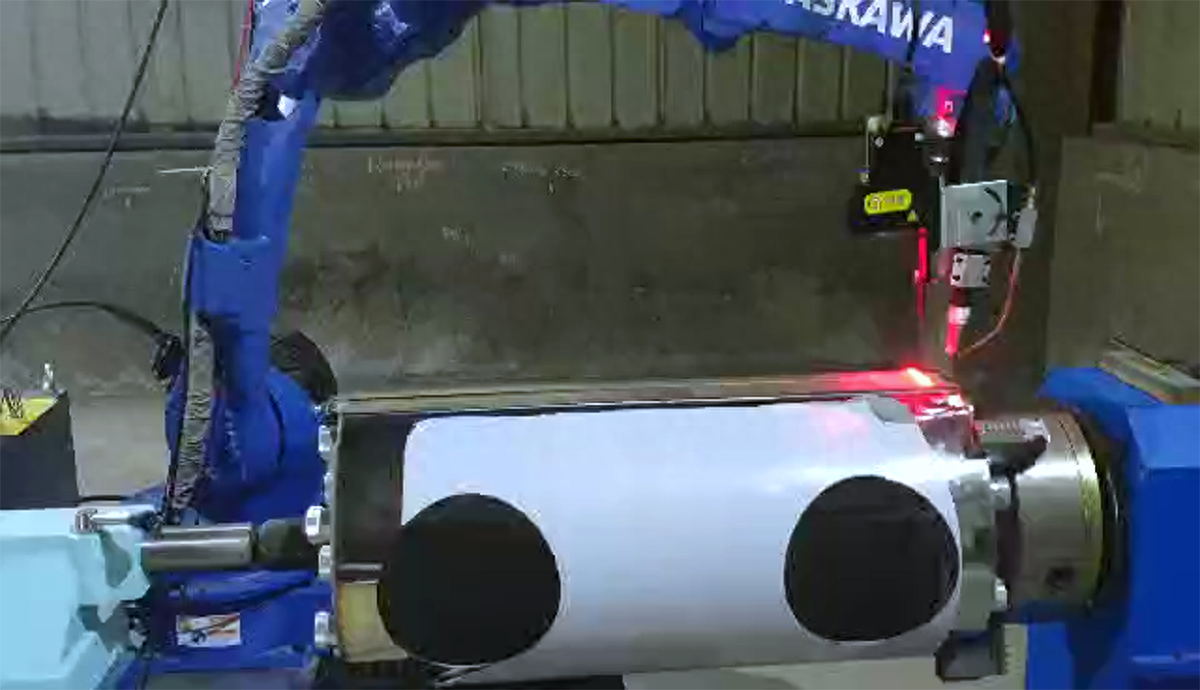
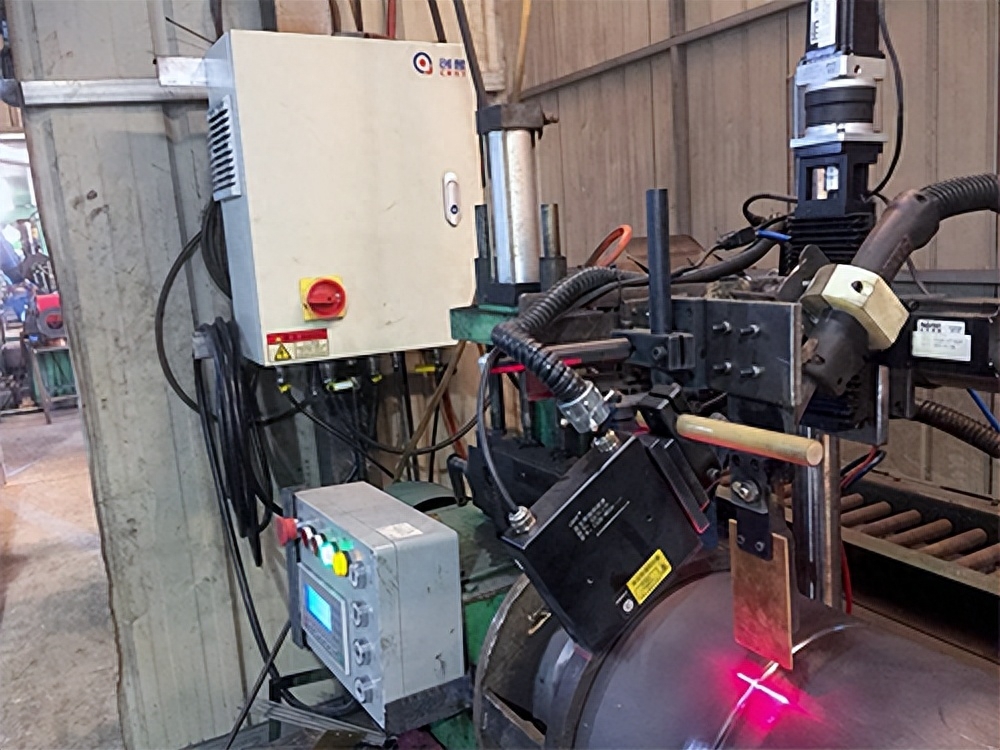
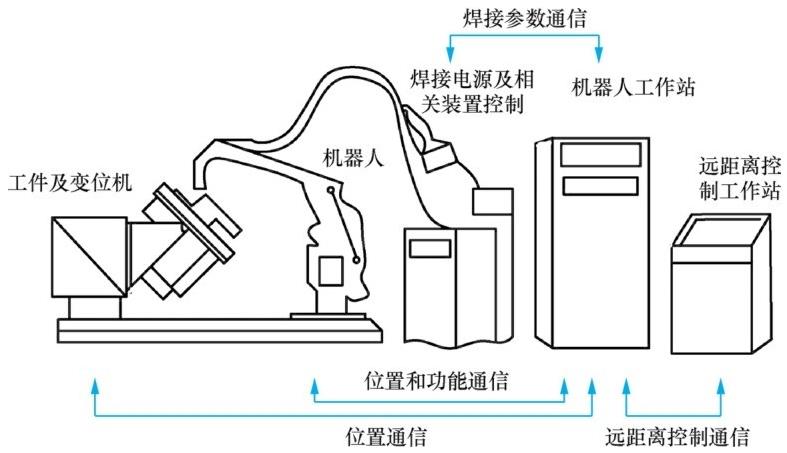
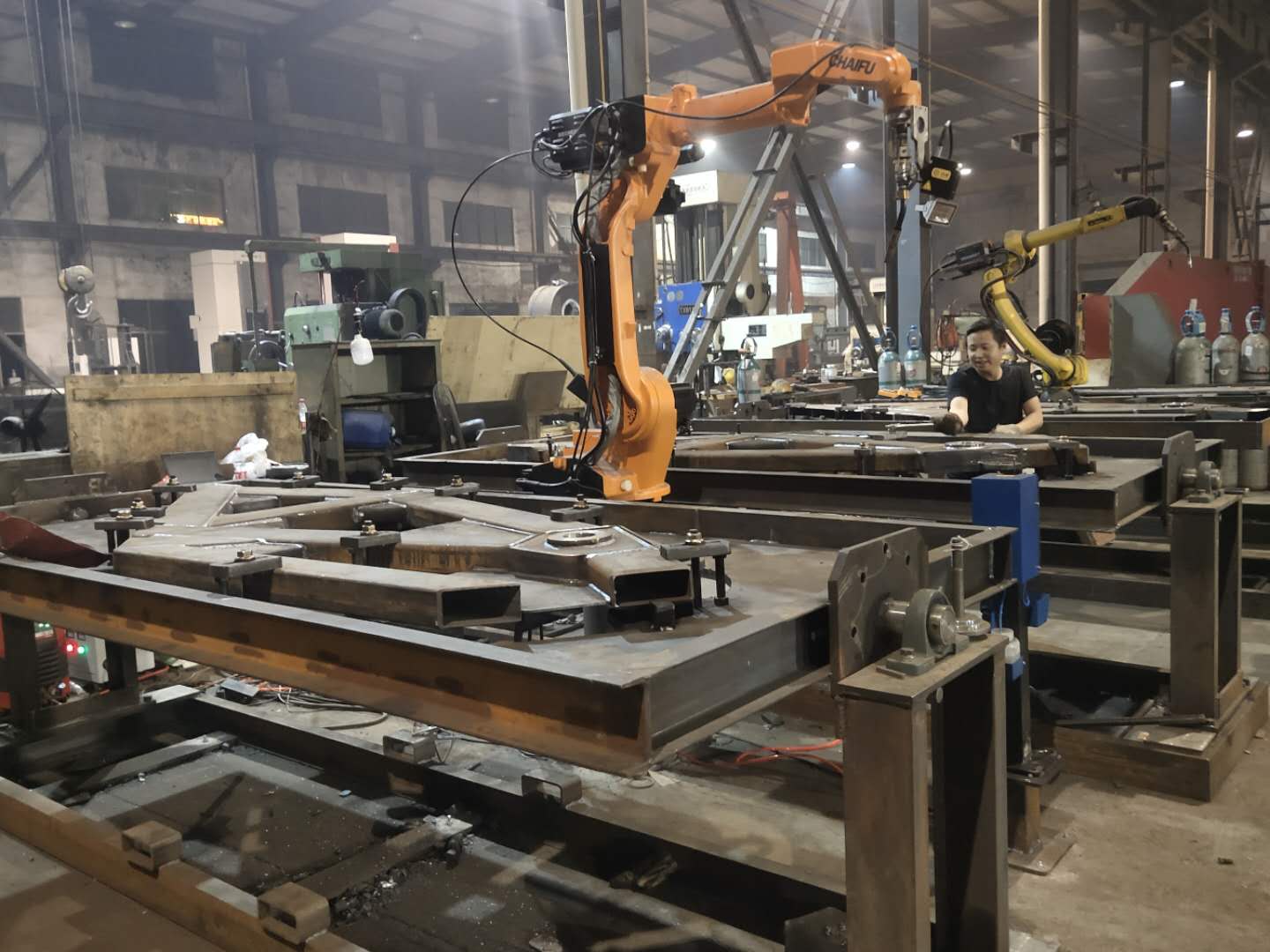
焊接机器人要完成焊接作业,必须依赖于控制系统与辅助设备的支持和配合。完整的焊接机器人系统般由机器人操作手、变位机、控制器、控制系统、焊接传感器、中央控制计算机和相应的安设备等组成。
焊接机器人是通过示教编程完成焊接工作,示教编程是逐步完成的,操作人员在示教器中设置焊缝轨迹的关键点以及焊接参数,焊接参数主要包括焊接电流、焊接电压、焊接速度、送丝速度、焊枪位姿、摆动幅度等,工业焊接机器人可以记忆操作人员的操作,并自动生成连续执行操作的程序。
在生成编程之后,需要先完成一遍示教操作,观察工业焊接机器人的运动轨迹是否出现偏差,然后进行试焊操作,操作人员根据焊接质量来调整焊接参数,完成示教后,只需要给工业焊接机器人一个启动命令,就可以进行精确焊接。
启动工业焊接机器人的时候,需要给操作流程进行,这样可以减少误操作的发生率,出现误操作,智能焊接系统会进行急停工作,起到保护作用。
中央控制计算机在焊接工作中发挥着重要的作用。通过串行接口与焊接机器人控制器相连接,中央控制计算机主要用于在同层次或不同层次的计算机间形成通信网络,同时与传感系统相配合,实现焊接路径和参数的离线编程、焊接家系统的应用及生产数据的管理。
焊接机器人实现自动化焊接生产,归功于各个组成部分配合以及作用,在焊接工作中能够稳定焊接质量,提高焊接效率,明确产品的生产周期。
责任编辑:tzh











































 工商网监
工商网监
评论