 德赢Vwin官网 App
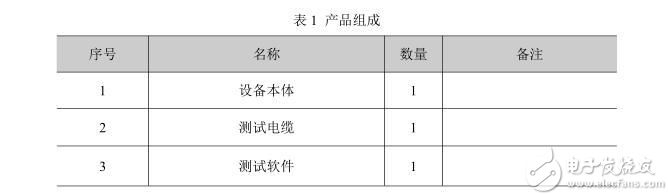
德赢Vwin官网 App

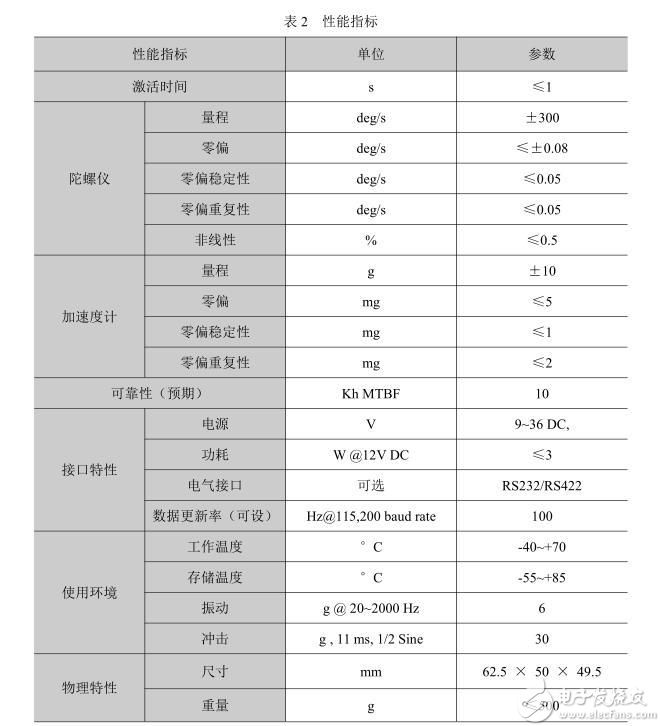
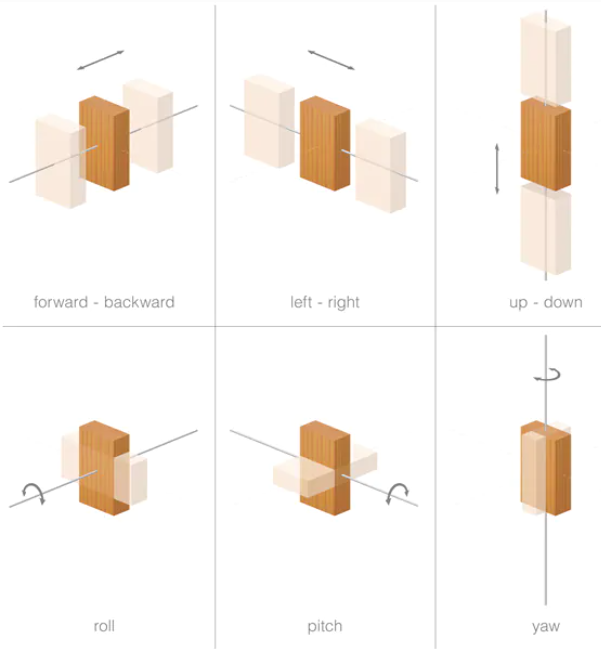
我们所说的惯性测量单元(IMU)包含了三个单轴的加速度计和三个单轴的陀螺,加速度计检测物体在载体坐标系统独立三轴的加速度信号,而陀螺检测载体相对于导航坐标系的角速度信号,测量物体在三维空间中的角速度和加速度,并以此解算出物体的姿态,在导航中用着很重要的应用价值,惯性测量单元(IMU)PA-IMU-01D采用三个单轴的高精度MEMS陀螺仪和三个单轴的高精度MEMS加速度计,通过信号调理、A/D 转换、数字滤波、温度及安装误差补偿,输出载体运动信息。
IMU惯性测量可用于导航、控制和动态测量,此系列产品采用密封设计,在恶劣环境下仍能精密的测量运动载体的角速度和加速度信息。
惯性测量单元(IMU)可用于导航与制导控制、平台稳定与控制、通用航空、与 GPS 组合、船舶姿态的动态测量、采矿和自动耕作、火车和集装箱跟踪等。
1.3.IMU惯性测量单元使用环境条件
1.低气压
工作条件:在 65~102kPa 大气压力下能正常工作;承受条件:同工作条件。
2.高温
工作条件:70℃能正常工作;承受条件:85℃。
3.低温
工作条件:-40℃能正常工作;承受条件:-45℃。
4.湿热
工作条件:在温度 60℃、湿度 95%的环境下能正常工作;承受条件:同工作条件。
5.霉菌
工作条件:具有防霉菌能力;承受条件:同工作条件。
6.振动:20Hz--2000 Hz,6g。
7.冲击:30g(11ms,半正弦)。
1.IMU惯性测量单元安装
安装产品前,用酒精擦拭产品并保证安装基面清洁;安装产品时尽量使产品坐标系和安装,平台坐标系保持一致,安装平台如果有挡板基面,使产品背面安装基面紧靠挡板基面,然后用螺钉安装固定。
IMU惯性测量单元正确机械装配示意图:
2.坐标系
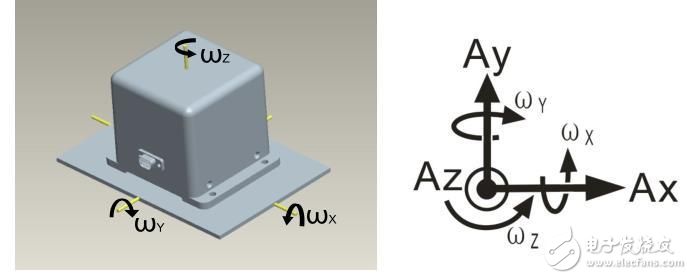
坐标符合右手坐标系规则,即将 PA-IMU-01D 平放在一平面上,面向 PA-IMU-01D 的连接器方向,则正前方为 y+轴,正右方为 x+轴,正上方为 z+轴;产品 PA-IMU-01D 及坐标系
如图 1 所示:图 1 PA-IMU-01D 产品坐标系
PA-IMU-01D 速率传感器测量给定轴的旋转角速率,旋转方向符合右手定则时,输出角速率信息为正。例如,如果使 PA-IMU-01D 在水平面上逆时针转动,可以在 z 轴得到正的角速率,
而 x 轴和 y 轴的角速率为零
3.接口条件
a) 设备具备 1 路 RS-422 串口,采用 5 线通讯方式,波特率为 115200bit/s,数据更新率≤10ms;
b) 设备输出接口采用 9 芯微矩形连接器 PA-IMU-01D;
c) 供电电源及功耗:9V~36V,DC24V,功耗≤3W;
e) 产品管脚定义如表 3、表 4 所示:表 3 产品管脚定义 (9 芯微矩形连接器)

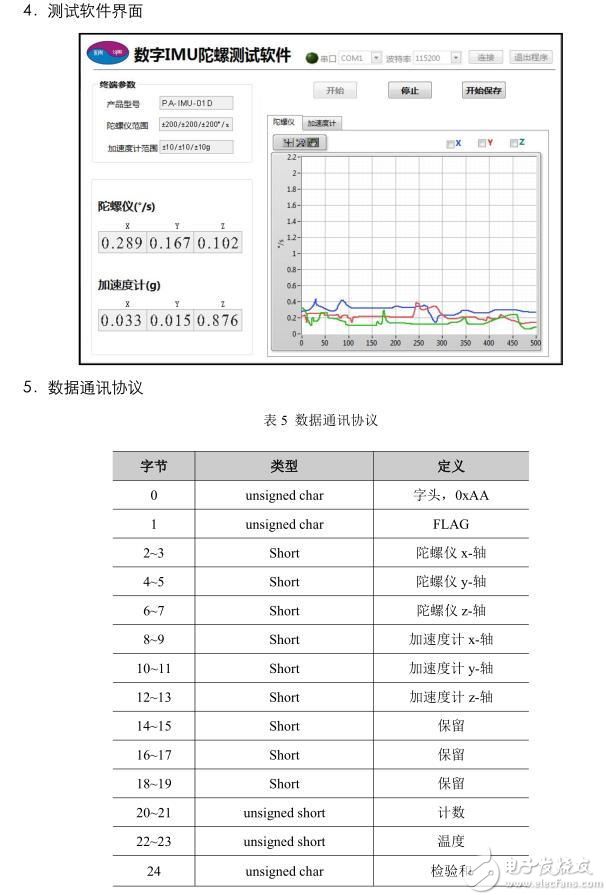
数字水平陀螺仪的测量数据封装为 25 字节。数据为 n Little Endian 格式。即低位(LSB)字节在先。
测量数据的解码:测量数据封装中,起始的帧头和最后的校验和用于同步通讯。中间依次是标志字节、计数器,陀螺仪三轴角速度,加速度计三轴加速度和温度。具体为(注:标准产品为陀螺 300 度每秒,加速度计 10g;如需其他量程,请订货时说明):
. a. 帧头: unsigned char,十六进制的常数, 0xAA;
. b. FLAG: unsigned char,0X37。
. c. 计数: unsigned short,测量数据封装的计数指示。每个数据周期中,计数器不断递增,满值为 255,超过满值溢出并从零开始。
. d. 陀螺仪 x-轴测量数据:数据类型为 signed short。从测量值到测量角速率的转换为:MEAS*GYRO_SCOPE/30000,MEAS 为陀螺仪 x 轴的当前测量值,而 GYRO_SCOPE 为陀螺的角度范围。
. e. 陀螺仪 y-轴测量数据:数据类型为 signed short。从测量值到测量角速率的转换为:
MEAS*GYRO_SCOPE/30000,MEAS 为陀螺仪 y 轴的当前测量值,而 GYRO_SCOPE 为陀螺的角度范围。
. f. 陀螺仪 z-轴测量数据:数据类型为 signed short。从测量值到测量角速率的转换为:
MEAS*GYRO_SCOPE/30000,MEAS 为陀螺仪 z 轴的当前测量值,而 GYRO_SCOPE 为陀螺的角度范围。
. g. 加速度计 x-轴测量数据:数据类型为 signed short。从测量值到测量加速度的转换为:
MEAS*ACC_SCOPE/30000,MEAS 为加速度计 x 轴的当前测量值,而 ACC_SCOPE 为加速度的测量范围。
. h. 加速度计 y-轴测量数据:数据类型为 signed short。从测量值到测量加速度的转换为:
MEAS*ACC_SCOPE/30000,MEAS 为加速度计 y 轴的当前测量值,而 ACC_SCOPE 为加速度的测量范围。
. i. 加速度计 z-轴测量数据:数据类型为 signed short。从测量值到测量加速度的转换为:
MEAS*ACC_SCOPE/30000,MEAS 为加速度计 z 轴的当前测量值,而 ACC_SCOPE 为加速度的测量范围。
. j. 温度测量: signed short。从测量值到测量温度的转换为:MEAS*0.01 ℃。
. k. 校验和: unsigned char。按字节从 FLAG 到最后的温度测量的无符号的总和。
惯性测量单元(IMU)产品使用
2.1. 产品使用指标:
1.大理石平台(静态指标)
. a. 操作方法输出值,重复上电 5 次;
. b. 5 组数据的最大值即为设备的静态精度。
2.摇摆台(动态指标)
. a. 设备固定在三轴摇摆台上,设备 X、Y、Z 三轴分别对应平行于摇摆台中、外、内框架轴(说明:设备 X、Y、Z 分别为载体横滚、航向、俯仰,分别对应摇摆台中、外、内框架轴);
. b. 启动摇摆台使其中、内框架转动至水平;
3.环境适应性
. a. 工作温度:-40℃~+70℃;
. b. 振动:20 Hz ~2000Hz,6g。
2.2. 产品直接使用
. a. 设备安装时,应保证基准安装面清洁,设备可用酒精擦拭,设备轴系坐标系应与安装基面的坐标系一致并紧固牢固安装;将数据电缆正确牢固连接;
. b. 确认系统提供设备的电源应满足设备的功耗,系统及设备上电;
. c. 启动系统主机,如设备没有接收或输出错误信息,请查看系统的通讯协议和设备是否一致。
2.3. 使用保管维护储存搬运运输要求
1.惯性测量单元(IMU)使用与保管
PA-IMU-01D 惯性测量单元为精密电子产品,使用时注意防尘、防潮、防霉,轻拿轻放,避免强烈冲击和震动;
不能随意打开底盖,以免仪器受损;
机壳不属于防水设计,应尽量避免在雨中使用或浸泡;
输入电压值必须为直流 9V~36V,如果输入电压过高,会导致产品损坏。
2.运输与贮存
. a. 产品在运输过程中应避免雨雪直接淋袭、太阳久晒、接触腐蚀性气体及机械损伤,产品在搬运过程中应注意轻搬轻放;
. b. 运输和贮存过程中避免受潮、撞击和磕碰,防止运输时的人为和机械损伤。在运输和贮存时,外包装盒应保持干燥、清洁、无污染;
. c. 长期存放产品的仓库环境温度为 25±5℃,相对湿度不大于 80%,库房内应无酸碱及腐蚀性气体,且无强烈的机械振动、冲击、强磁场作用。
3. 故障排除维修
1. 场站级(使用者)
除设备本体故障,如连接器短路、短路等。
2. 基地级(维修站)
本设备属于高精度、高技术的测量产品,所以设备一旦出现问题需返厂维修或更换。
3. 返厂级(制造者)
设备本体故障。
常见故障:
1) 无电流
用万用表通断档检测数据线,若数据线完好则判设备故障;
2)短路
用万用表通断档检测数据线,若数据线完好则判设备故障。
































 工商网监
工商网监
评论