开源项目,从感知到控制、从定位到构图、从导航到可视化,都使用ROS作为基础。 而不久前AMD XILINX推出了以ROS2为中心的增强机器人自适应计算能力的硬件加速方法——Kria Robotics Stack(KRS),通过硬件加速为机器人带来自适应计算能力。 从ROS到
2022-12-12 06:25:00 1270
1270 自适应计算包含能够针对具体应用进行优化的硬件,例如现场可编程门阵列 (FPGA),它是一个功能强大的解决方案,专门用于基于AI 的边缘应用。
2021-07-23 17:27:392460 
机器人是一种系统级的系统,它由感知周边环境的传感器、根据感知采取行动的致动器和负责处理数据的计算构成,用于对其应用做出连贯一致的响应。
2021-11-11 15:02:532469 由于机器人行为建立在 ROS 节点交互的结果之上,因此用于这个用途的加速器通过从总体上减少 ROS 和 ROS 2 计算图数据流,显著影响总时延。
2021-11-11 15:18:513254 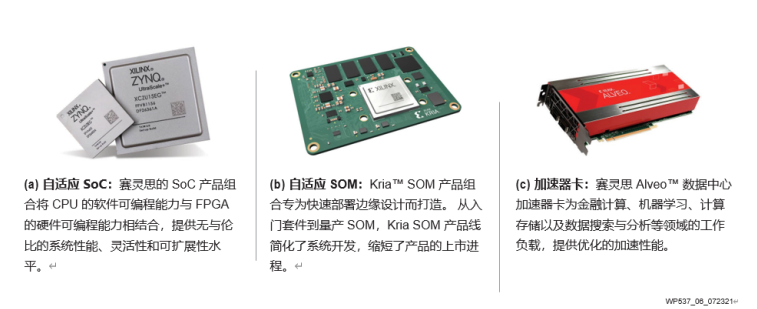
第一个支柱是 ament ROS 2 构建系统的扩展。ament_vitis(1)通过一系列 CMake 宏和实用工具实现这些扩展,将 Vitis 工具包含到 ROS 2 生态系统内。
2021-11-11 15:24:552122 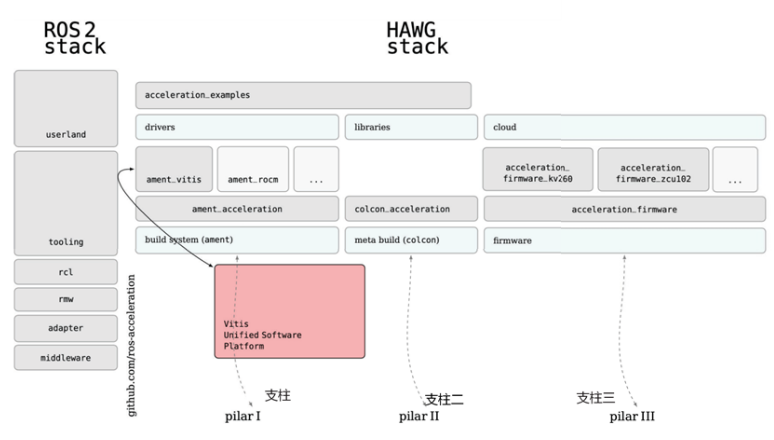
随着 ROS 超越学术层面开始进入工业和其他领域,ROS 的局限性也日渐凸显,如缺乏嵌入式支持和深度嵌入的原生支持,单机器人软件架构,无实时功能和缺乏安全性等。
2021-11-11 15:35:562933 
AMD Versal AI Edge 自适应计算加速平台之准备工作,包含软件环境、硬件环境。
2024-03-07 15:49:10232 
【ALINX 技术分享】AMD Versal AI Edge 自适应计算加速平台之 Versal 介绍,以及Versal 芯片开发流程的简介。
2024-03-07 16:03:13234 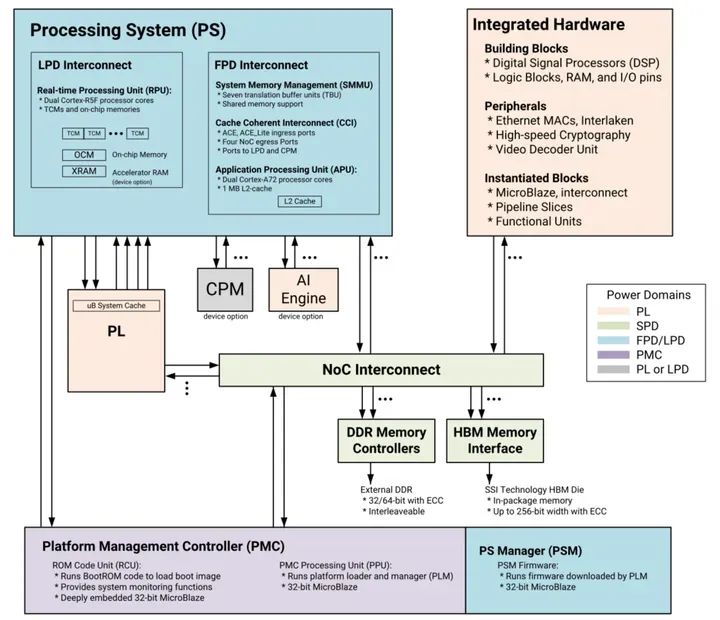
ROS 2 Crystal Clemmys版机器人操作系统补充说明
2020-06-10 11:29:00
1、前记:这篇博文为自己学习是的记录,做这一切的目的就是熟悉ROS环境下如何控制Baxter机器人做运动。以便将来对其控制的扩展,如基于视觉(单目,双目,或Kinect)交互的控制,基于leap
2019-05-28 07:50:49
5、初始化rosdep一、ROS简介1、什么是ROSros是机器人操作系统(Robot Operating System)的英文缩写。ROS是用于编写机器人软件程序的一种具有高度灵活性的软件架构。2、ROS产生、发展和壮大的原因和意义ROS的发展逐渐的趋于成熟,近年来也逐步是面对着Ubuntu的更新而更
2021-12-17 08:24:40
ROS系统是什么
ROS(Robot Operating System)是一个适用于机器人的开源的元操作系统。它提供了操作系统应有的服务,包括硬件抽象,底层设备控制,常用函数的实现,进程间消息传递
2023-11-30 16:01:01
请各位大神指导,移动式机器人是怎么做EMC保护的,机器人是锂电池供电,所以就不能接大地了,那么对机器人的干扰是通过何种方式来释放或转移的?
2016-07-26 13:33:14
可能需要非常长的时间,并且需要更多的代码行。然而,由于机器人非常依赖于实时性能,C和C++是最接近我们机器人专家“标准语言”的编程语言。 2. PythonPython是一种计算机程序设计语言,是一种
2018-12-05 16:42:09
及应用机器人技术基础(熊有伦)(此书比较早) 2.运动规划书籍:Principles of Robot Motion Theory, Algorithms
2019-05-22 06:53:10
钢琴曲目的机器人,只需要它实现能弹奏曲目。因为现在刚刚接触机器人制作方面,只懂一些中断和舵机啥的,不知道做成的难度有多大,,,,希望各位前辈能够不舍赐教。如果能做成,都需要实现哪些模块呢?!
2017-05-22 17:09:06
钢琴曲目的机器人,只需要它实现能弹奏曲目。因为现在刚刚接触机器人制作方面,只懂一些中断和舵机啥的,不知道做成的难度有多大,,,,希望各位前辈能够不舍赐教。如果能做成,都需要实现哪些模块呢?!
2017-05-22 17:06:22
机器人技术和机器学习正成为嵌入式系统硬件和软件供应商的下一个重大事件。嵌入式系统可以通过网络连接和物联网(IoT)来传递信息、共享资源。无论是智能,低能耗,边缘设备,中间网关还是计算节点,都需要
2021-12-20 06:03:10
的是摄像头,随着电脑技术的飞速发展,今天获得一个廉价的摄像头已经是非常easy的事情了,一个普通摄像头目前在市场上售价也就RMB200多点。但是对我们而言,与之相配套的,能应用于机器人的识别软件和硬件
2015-01-16 17:21:37
超薄智能机械手,JIMU-OO分体式AGV亮相,机器人无需在车版或泊车架,可在车辆底进行旋转、调拨及转运,实现最小面积穿越。短短时间内智能停车领域的AGV企业,已经从当初的寥寥无几演变为了争相入局
2018-11-28 16:20:46
机器人的定义是什么?机器人优点和缺点是什么?机器人是由哪些部分组成的?工业机器人的应用有哪些?
2021-07-05 06:48:21
安静高效的机器人正在接管——阻止它们已经太迟了。不,这不是机器人世界末日另一个可怕的故事。这是关于您下一设计硬件预算和规划面临威胁的问题。虽然您无法阻碍技术变革,但是您可以预测其影响。
2019-07-17 08:08:16
机器人编程需要什么软件
2023-11-01 07:34:30
Xeon+FPGA平台和Xeon Phi系列产品来推动异构计算的实施。那么,在我们所关心的机器人领域,情况又是如何?机器人是复杂的机电一体化装置,综合运用了机械与精密机械、微电子与计算机、自动控制与驱动、传感器
2017-03-20 17:54:31
提供稳定、可靠的技术支持和维护,导致ROS在开发商业化系统时存在隐患,也限制了其发展。未来,机器人应用软件行业会有类似电脑软件行业一样的数量众多的开发公司,并为各自细分领域的用户提供稳定可靠的服务
2018-03-02 14:42:06
地将设想付诸实现,对实时嵌入式和FPGA硬件进行无缝部署,并通过整合各种处理平台、第三方软件工具和预制机器人平台,达到软件的最大灵活性。 “通常制造一个新的机器人需要从头做起。如果没有软件标准,代码重复
2019-05-21 07:40:08
全网最实用的STM32和ROS机器人的串口通信方案
2021-08-11 07:27:07
【ROS RIKIBOT基础–使用系列】ROS机器人硬件介绍1.RIKIBOT机器人硬件介绍1.1硬件框架ROS机器人硬件 采用树莓派和STM32驱动板组成双系统通信框架,具体组成参考下图:1.2
2021-07-30 06:59:38
申请理由:开发版可以很好的与机器人ros系统相配合,实现对机器人的控制,本人参加过飞思卡尔,对嵌入式有很深的了解项目描述:实现对机器人自动巡逻控制,实现通过网络对机器人远程控制,实现远程观看机器人视频信息,实现机器人照顾老人或儿童,实现远程操控家中空调,灯,电视等家电
2015-07-07 00:38:04
目的开源设计。项目计划1、移植opencv和机器人操作系统(ROS)到HarmonyOS中,逐渐优化成一个应用层框架2、将用于比赛中的视觉目标识别定位系统和slm系统,代替传统使用x86pc系统,实现低
2020-10-29 14:20:47
项目名称:智能跟随机器人试用计划:申请理由本人在移动端领域有四年的开发经验。目前从事智能机器人的开发,主要负责设计和开发家居智能儿童陪伴型机器人的开发。想要借助Camera开发板丰富机器人的功能
2020-12-18 10:25:18
的可扩展性,以及分布式理念在机器人尤其是服务机器人领域的应用越来越广泛. 由于ROS系统的运行要求较高的计算资源,所以其主节点(roscore)主要是在PC或者高速的嵌入式PC上运行,在运算能力较低
2016-04-07 22:00:07
项目名称:基于机器视觉的工业机器人抓取工作站试用计划:申请理由本人是嘉兴技师学院教师,浙江机器人有限公司技术顾问。在机器人领域有5年多的学习和开发经验,曾设参与多项工业机器人工作站的开发与调试
2019-09-18 14:18:14
到达指定位置、机器人定时巡逻、跟随等等,于是有了机器人实时定位与导航。定位定位算法使用自适应的蒙特卡洛(AMCL),蒙特卡洛是一种经典的粒子滤波算法,它适应于局部定位和全局定位两类问题,自适应解决了
2019-08-21 22:12:16
Tran***ot ROS教育机器人如果你热衷于编程探索和DIY创作,恰好又在寻找一款可以让你自由发挥,二次开发的ROS平台,那么我们今天体验的这款Tranbot ROS教育机器人将会非常适合你。对于这款机器人的装箱清单,8个字形容:物资丰富,品质过硬。
2021-11-25 20:33:50
本帖最后由 mu0543 于 2021-11-25 20:23 编辑
如果你热衷于编程探索和DIY创作,恰好又在寻找一款可以让你自由发挥,二次开发的ROS平台,那么我们今天体验的这款Tranbot ROS教育机器人将会非常适合你。对于这款机器人的装箱清单,8个字形容:物资丰富,品质过硬。
2021-11-25 20:13:59
项目名称:基于机器视觉的工业机器人抓取工作站试用计划:申请理由 本人是嘉兴技师学院教师,浙江机器人有限公司技术顾问。在机器人领域有5年多的学习和开发经验,曾设参与多项工业机器人工作站的开发与调试
2019-09-18 19:24:11
了进一步的发展和完善。近年来,国内外学者对自适应控制已做了卓越的研究工作,也取得了可喜的研究成果,有许多研究成果已经应用到生产实际中。
随着科学技术的发展和社会的进步,机器人的应用越来越普及,不仅广泛应用
2023-09-21 07:55:45
基本问题1. 什么是 ROSROS 是一个操作系统ROS 是一种跨平台模块化软件通讯机制ROS 是一系列开源工具ROS 是一系列最先进的算法2. ROS 产生、发展和壮大的原因和意义最初人们是想设计制造一个复杂的机器人,这个机器人能够类似于人一样能够感知,自我导航,能够自我控制去做一些复杂的工作
2021-12-17 06:08:09
` 本帖最后由 大连云港 于 2015-1-19 11:02 编辑
工业机器人是面向工业领域的多关节机械手或多自由度的机器人。工业机器人是自动执行工作的机器装置,是靠自身动力和控制能力来实现
2015-01-19 10:58:38
有没有人知道什么是拖拽式机器人,其具体定义是什么
2016-03-11 09:20:00
创龙TL5728-EasyEVM-A4开发板如何移植ros机器人操作系统?
2020-01-02 09:32:46
)。中断向量可以保证在实时控制器命令生成和FPGA底层硬件通信之间的同步。而后,FPGA背板采用I2C协议控制12条总线,每条总线分别控制五个面板。从而,机器人所看到的环境决定了针对苍蝇的视觉刺激,而苍蝇对视
2019-04-30 09:40:04
机器人是先进的机电一体化数字化装备,集机械、电子、控制、计算机、传感器、人工智能等多学科高新技术于一体,技术附加值很高。对提高产品的质量与产量、保障人身安全,改善劳动环境,减轻劳动强度,提高劳动生产率
2015-09-02 14:03:18
本实验箱以大载重的全向麦轮车为载体,基于ROS系统作为开发平台,使用双驱和四驱两种不同的结构作为机器人本体,最终通过地面二维码实现导航机器人的精确方向和距离控制...
2021-09-03 07:29:36
基于结构自适应的多机器人协作机制研究
2012-08-20 13:43:51
,导航技术,计算机技术,人工智能等多个领域,因而对移动机器人的控制部分提出很高的要求,特别是视觉传感器的出现,要求控制系统不仅存储量大,而且处理速度快等。以往基于PLC和单片机控制的移动机器人就不能很好
2020-11-23 15:08:52
制作ROS移动机器人地盘摘要概述硬件需求车体设计电路设计程序设计摘要本教程讲述如何利用扫地机轮子制作ROS移动机器人地盘。概述原本不打算自己造轮子的,但是网上的移动机器人地盘要么巨贵--对于学生党
2022-01-14 08:36:54
怎样去实现ROS机器人的定位导航呢?如何对ROS机器人的定位导航进行仿真?
2021-12-23 09:22:45
目录介绍一、底盘主控板二、嵌入式开发板1. 与上位机pc的关系2. 与STM32主控板的关系介绍自下而上的分析实体机器人(差分轮速机器人)搭建中的关键过程。一、底盘主控板本部分搭建实体机器人ros
2022-01-20 07:36:08
性能与可靠的机械控制性能的同时保证,才能在短时间内准确寻找到火源并灭火回家。在此以ARM9处理器为核心,对基于嵌入式系统的智能灭火机器人进行了设计。本文将从硬件和软件方面讲述智能灭火机器人控制器的实现方法,并且给出了机器人灭火的具体实验,验证了方案的可行性,为智能灭火机器人的进一步研究提供了平台。
2019-07-31 06:23:18
过程软件环境安装ROS安装机器人底盘调试硬件介绍:电源36V电池组(充电设备应是42V直流电源适配器)若充电设备电压低于36V会导致适配器损坏下位机树莓派3B+适用于Ubuntu16.04 mate环境Jetson nano适用于Ubuntu18.04 英伟达官方配置镜像Jetso
2022-01-25 07:46:11
机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。机器人应用情况,是一个国家工业自动化水平的重要标志。
2020-03-27 09:03:30
进行通讯。机器人控制器(RC)的主计算机完成机器人的运动规划、插补和位置伺服以及主控逻辑、数字I/O、传感器处理等功能,而编程示教盒完成信息的显示和按键的输入。 (2)模块化层次化的控制器软件系统
2018-11-23 10:40:38
的原理进行了严谨的阐述,并使用典型例题解释原理。每章附不同难度值的习题,供读者训练,有利于加深读者对机器人基本概念的理解。每章还设置有MATLAB编程作业,对于读者提升机器人知识的应用能力大有帮助。2、ROS
2020-11-16 16:14:52
怎么实现六足机器人的设计?
2021-11-22 08:02:22
怎么实现基于stm32的grbl写字机器人的设计?
2021-11-26 06:52:18
怎么实现对机甲大师机器人的控制?
2021-11-19 06:33:45
。两家公司宣布,用于 RA MCU 的瑞萨电子 EK-RA6M5 评估套件是 micro-ROS 开发框架的官方支持硬件平台。所述微ROS框架,作为业界机器人操作系统针对MCU,允许标准化集成的MCU到
2022-02-11 06:19:04
关于ros智能机器人,就是一个写智能机器人代码的一个虚拟机,
2021-10-13 19:20:16
起步较晚,随着扫地机器人功能更完善,智能化程度更高,预计未来中国沿海发达地区扫地机器人渗透率水平会达到美国扫地机器人目前的渗透率水平。2.本文编写目的本文主要介绍通过智能WiFi控制技术实现手机微信控制
2017-05-27 13:31:20
自动蔽障,自动清扫的功能。清洁机器人是实现智能清扫的主题部分,我们将要做到的是:完成机械结构的设计与制作、硬件电路的设计及实现、底层软件的编写以及系统调试、智能手机蓝牙通讯技术的研究及实现、清洁机器人
2013-11-08 22:30:10
全网最实用的STM32和ROS机器人的串口通信方案小白学移动机器人同名公众号:小白学移动机器人创作声明:内容包含虚构创作内容中的情节存在虚构加工,仅供参考全网最实用的STM32和ROS机器人的串口
2021-08-20 06:33:28
20世纪以来随着电子技术的不断发展,以及人类对于自身的不断了解,机器人的研究也在不断的深入。现阶段能做出外表接近人类的机器人,走路接近人类的机器人……但这些都属于很前沿的领域,研究门槛高,实际的商业用途不是很广,所以大多还停留在样品阶段,走进市场的很少。
2019-10-16 08:27:30
跟踪等领域。不同种类的机器人由于工作的重点不一样,它的视觉系统在软件或硬件上都有着细微的差别。本文研究基于服务机器人的单目视觉系统。它处理的是二维图像,是基于对无遮挡物体颜色和形状的识别以及3D目标物体的平动跟踪。
2020-04-07 07:27:24
机甲大师机器人软件单元包括哪些?
2021-11-22 07:10:42
机甲大师机器人的软件架构设计如何实现?
2021-11-22 07:55:21
。为探索多场景交互学习的可行方案,领先的移动机器人底盘和软硬件系统提供商松灵机器人,借助多年的机器人硬件结构创新经验和软件算法开发优势,为科研教育用户开创了全球首款集四种运动模态和高性能传感器系统于
2021-08-30 08:39:33
出现的问题。 视觉系统的软件设计完成还要对其鲁棒性进行检测和提高,以适应复杂的外部环境。 二、机器人视觉工作原理 机器人视觉硬件主要包括图像获取和视觉处理两部分,而图像获取由照明系统、视觉传感器
2021-04-12 10:50:55
请问一下ROS机器人的硬件是由哪些部分组成的?分别有何功能?
2021-11-04 06:35:41
怎么设计一种室外移动机器人组合导航定位系统?如何实现室外移动机器人组合导航定位系统的硬件设计?如何实现室外移动机器人组合导航定位系统的软件设计?
2021-04-19 10:50:33
随着人工智能技术的发展,机器人已经开始接管人类的部分工作,例如快递、工厂作业、餐厅服务员甚至媒体编辑---纽约时报就聘请了一位机器人做总编。未来,机器人可以介入半导体设计开发吗?例如,机器人可以进行FPGA开发吗?
2019-10-10 06:33:18
菜鸟想要学习ROS机器人操作系统,但是没能找到系统的资料,请问有哪位大神研究过,可以分享一些资料吗?跪谢了!!!!!!!!!
2019-02-19 23:14:23
应用于新的领域,且不必重复实现。3, 快速测试 为机器人开发软件比其他软件开发更具挑战性,主要是因为调试准备时间长,且调试过程复杂。况且,因为硬件维修、经费有限等因素,不一定随时有机器人可供使用
2017-06-09 17:18:49
://emanual.robotis.com/docs/en/platform/turtlebot3/overview/1.先了解turtlebot3机器人的配置顺序(1)配置调试用的远程电脑端,安装Linux系统、ROS系统
2018-06-08 15:27:18
实现软件定义无线电和认知无线电的自适应特性
FPGA对自适应性的支持得益于FPGA的处理能力,作为今天SDR和CR的处理平台,FPGA具备很大的价值。
2010-03-05 10:51:06 26
26 基于ELM的机器人自适应跟踪控制_李军
2017-01-08 11:37:440 地形自适应救援机器人设计_张智攀
2017-01-18 20:24:573 (Adaptive Compute Acceleration Platform,自适应计算加速平台)。ACAP 是一个高度集成的多核异构计算平台,能根据各种应用与工作负载的需求从硬件层对其进行灵活修改。
2018-03-20 10:21:237724 2018年10月16日,FPGA大厂赛灵思(Xilinx)在北京召开了一年一度的“Xilinx开发者大会 ”(XDF) 。在本次会议上,赛灵思发布了全球首款自适应计算加速平台 (ACAP)芯片系列Versal。
2018-10-22 16:52:075311 XACC 将配备赛灵思面向自适应计算加速而量身定制的最新硬件与软件技术。每个集群都经过专门配置,确保全球一流的学术团队开展最前沿的 HPC 研究。
2020-05-07 16:14:12969 自适应和智能计算的全球领先企业赛灵思公司宣布其正在全球四所最负盛名的高等学府设立“赛灵思®自适应计算集群”。
2020-05-08 11:11:472994 可重构计算技术和自适应系统作为最有前途的微处理器体系结构之一引起了人们的极大兴趣。可重构系统的起源,也被称为可编程逻辑器件或现场可编程门阵列(fpga),已经演变成今天复杂的片上系统fpga、动态可重构fpga,以及各自适应计算设备。
2021-03-28 09:40:585 以前设计一个产品,先要规划好硬件架构,等硬件设计全部完成后,才会开始软件部分的开发,然后才是完整产品的发布。现在,随着云计算、互联网的发展,以及AI、5G和自动驾驶的兴起,硬件和产品的开发流程需求
2021-09-03 11:20:472272 赛灵思2021自适应计算挑战赛自9月7日正式开赛以来,收到了来自全球各地区的FPGA软硬件开发者们的积极关注以及踊跃报名!通过挑战赛我们希望开发者能运用 Vivado 设计套件、Vitis 开发环境
2021-10-27 17:16:363835 传统的机器人软件编程是在预定义的架构和约束条件下,在给定机器人的 CPU 中进行功能编程。
2021-11-11 15:33:223390 
当您将 FPGA 的自适应计算加速与低延迟连接相结合时,您可以在可组合数据中心更进一步。您可以将计算繁重的工作负载分配给通过适应性强的智能结构互连的加速器集群——按需创建高性能计算机。
2022-06-03 11:14:00883 )硬件加速框架——ROBOTCORE™。ROS是机器人技术的标准。该公司为机器人提供半导体构建模块,通过硬件加速为高性能机器人创建定制计算架构,同时保持机器人和加速器的硬件无关性(支持流行的FPGA和GPU)。 ROBOTCORE™可帮助机器人工程师创建与ROS和ROS 2 API兼容的知识产权(IP)核心,以提高包括
2022-06-16 12:40:201685 机器人是一种复合系统,它由感知周边环境的传感器、根据感知采取行动的致动器和负责处理数据的计算构成,从而对其应用做出连贯一致的响应。在很大程度上,机器人技术是一种系统集成的艺术,在软件和硬件方面皆是如此。
2022-08-01 08:09:47667 
项目,从感知到控制、从定位到构图、从导航到可视化,都使用ROS作为基础。 而不久前AMD XILINX推出了以ROS2为中心的增强机器人自适应计算能力的硬件加速方法——Kria Robotics Stack(KRS),通过硬件加速为机器人带来自适应计算能力。 从ROS到ROS
2022-12-12 07:10:06584 德赢Vwin官网
网站提供《机器人中的自适应计算.pdf》资料免费下载
2023-09-14 09:49:050 德赢Vwin官网
网站提供《Versal:首款自适应计算加速平台(ACAP).pdf》资料免费下载
2023-09-18 09:28:171
 德赢Vwin官网
App
德赢Vwin官网
App









 工商网监
工商网监
评论