 德赢Vwin官网
App
德赢Vwin官网
App


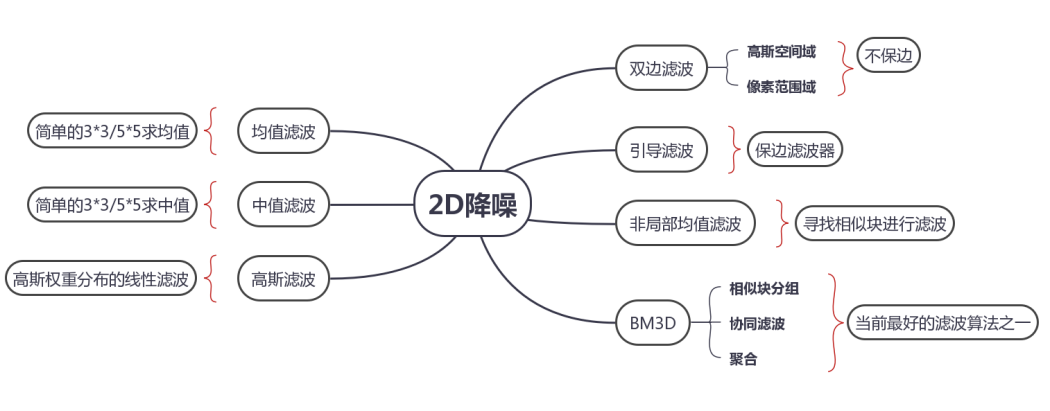
均值滤波
均值滤波是典型的线性滤波算法,它是指在图像上对目标像素给一个模板,该模板包括了其周围的临近像素(以目标像素为中心的周围个像素,构成一个滤波模板,即去掉目标像素本身),再用模板中的全体像素的平均值来代替原来像素值。
均值滤波也称为线性滤波,其采用的主要方法为邻域平均法。线性滤波的基本原理是用均值代替原图像中的各个像素值,即对待处理的当前像素点(x,y),选择一个模板,该模板由其近邻的若干像素组成,求模板中所有像素的均值,再把该均值赋予当前像素点(x,y),作为处理后图像在该点上的灰度g(x,y),即g(x,y)=/m ∑f(x,y) m为该模板中包含当前像素在内的像素总个数。
均值滤波介绍
滤波是滤波是将信号中特定波段频率滤除的操作,是从含有干扰的接收信号中提取有用信号的一种技术。
均值滤波是典型的线性滤波算法,它是指在图像上对目标像素给一个模板,该模板包括了其周围的临近像素(如×模板:以目标象素为中心的周围个象素,构成一个滤波模板,即去掉目标象素本身),再用模板中的全体像素的平均值来代替原来像素值。
均值滤波效果:平滑线性滤波处理降低了图像的“尖锐”变化。由于典型的随机噪声由灰度级的急剧变化组成,因此常见的平滑处理的应用就是降低噪声。均值滤波器的主要应用是去除图像中的不相关细节,其中“不相关”是指与滤波器模板尺寸相比较小的像素区域。然而,由于图像的边缘也是由图像灰度的尖锐变化带来的特性,所以均值滤波处理还是存在着边缘模糊的负面效应。
均值滤波算法实现(C语言)
// junzhilvbo.cpp : 定义控制台应用程序的入口点。
//
#include “stdafx.h”
#include “stdlib.h”
#include “string.h”
#define DATA_X //数字图像水平像素个数
#define DATA_Y //数字图像竖直像素个数
void OpenFile(const char *cFilePath , int nOriginalData[DATA_Y][DATA_X])
{
printf(“正在获取数据。。。。。。 ”);
FILE *fp ;
fp = fopen(cFilePath , “r”);
if(NULL == fp)
{
printf(“open file failed! ”);
return ;
}
unsigned char *pData = (unsigned char *)malloc(sizeof(unsigned char)*DATA_X*DATA_Y);
if(NULL == pData)
{
printf(“memory malloc failed! ”);
return ;
}
fread(pData , sizeof(unsigned char)*DATA_X*DATA_Y , , fp);
int count_x = ;
int count_y = ;
for(;count_y 《 DATA_Y ; count_y++)
{
for(; count_x 《 DATA_X ;count_x++)
{
nOriginalData[count_y][count_x] = pData[count_y*DATA_Y+count_x];
}
}
free(pData);
fclose(fp);
return ;
}
void SaveFile(const char *cFilePath , int nResultData[DATA_Y][DATA_X])
{
printf(“正在保存数据。。。。。。 ”);
int count_x,count_y;
FILE *fp ;
fp = fopen(cFilePath , “w”);
if(NULL == fp)
{
printf(“open file failed! ”);
return ;
}
for(count_y=;count_y《DATA_Y;count_y++)
{
for(count_x=;count_x《DATA_X;count_x++)
{
fwrite(&nResultData[count_y][count_x],,,fp);
}
}
fclose(fp);
printf(“文件保存成功! ”);
return ;
}
bool JunZhiLvBo(const int nOriginalData[DATA_Y][DATA_X], int nResultData[DATA_Y][DATA_X])
{
printf(“正在进行均值滤波。。。。。。 ”);
int count_x ,count_y ;
/**模版滤波计算,不计算边缘像素*/
for(count_y = ; count_y 《 DATA_Y ; count_y++)
{
for(count_x = ; count_x 《 DATA_X ;count_x++)
{
nResultData[count_y][count_x] = (int)((nOriginalData[count_y-][count_x-]+
nOriginalData[count_y-][count_x] +
nOriginalData[count_y-][count_x+]+
nOriginalData[count_y][count_x-] +
nOriginalData[count_y][count_x] +
nOriginalData[count_y][count_x+] +
nOriginalData[count_y+][count_x-]+
nOriginalData[count_y+][count_x] +
nOriginalData[count_y+][count_x+])/);
}
}
/*对四个边缘直接进行赋值处理*/
for(count_x=;count_x《DATA_X;count_x++) //水平边缘像素等于原来像素灰度值
{
nResultData[][count_x]=nOriginalData[][count_x];
nResultData[DATA_Y-][count_x]=nOriginalData[DATA_Y-][count_x];
}
for(count_y=;count_y《DATA_Y-;count_y++) //竖直边缘像素等于原来像素灰度值
{
nResultData[count_y][]=nOriginalData[count_y][];
nResultData[count_y][DATA_X-]=nOriginalData[count_y][DATA_X-];
}
return true ;
}
int _tmain(int argc, _TCHAR* argv[])
{
int nOriginalData[DATA_Y][DATA_X]; //保存原始图像灰度值
int nResultData[DATA_Y][DATA_X]; //保存滤波后的灰度值
memset(nOriginalData,,sizeof(nOriginalData)); //初始化数组
memset(nResultData,,sizeof(nResultData));
char cOpenFilePath[] = “Lena.raw”; //图像文件路径
OpenFile(cOpenFilePath,nOriginalData);
if(!JunZhiLvBo(nOriginalData,nResultData)) //滤波计算
{
printf(“操作失败! ”);
return ;
}
char cSaveFilePath[] = “Result.raw”; //文件保存路径
SaveFile(cSaveFilePath,nResultData);
return ;
}
均值滤波算法效果对比
均值滤波之前: 均值滤波之后:














 工商网监
工商网监
评论