 德赢Vwin官网
App
德赢Vwin官网
App











 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
这是最简单的 Arduino 机器人。这个 Arduino 机器人的名字是 Otto Robot。初学者可以通过简单的步骤构建它。所有代码和库都在我的 github 页面上给出。
让我们开始这个剪切的小 arduino 项目。
第 1 步:要求

1 / 13
- Robot Body,您可以在线购买,也可以自己打印,从这里下载 stl 文件。
- 四个 SG90 舵机
- Arduino纳米
- Arduino 纳米编程电缆。
- arduino nano 的扩展屏蔽。
- 超声波模块。
- 基于凝胶的超级胶水。
- 134N3P充电升压模块。
- 3.7V 1000mAh 电池。
- 螺丝刀和螺丝。
- 伺服器附带的伺服顶部。
- 开/关按钮开关。
- 一些母对母线。
第2步:安装腿伺服
1 / 2
- 如图所示安装两个伺服。
- 拧紧。
第 3 步:在腿上安装伺服顶部
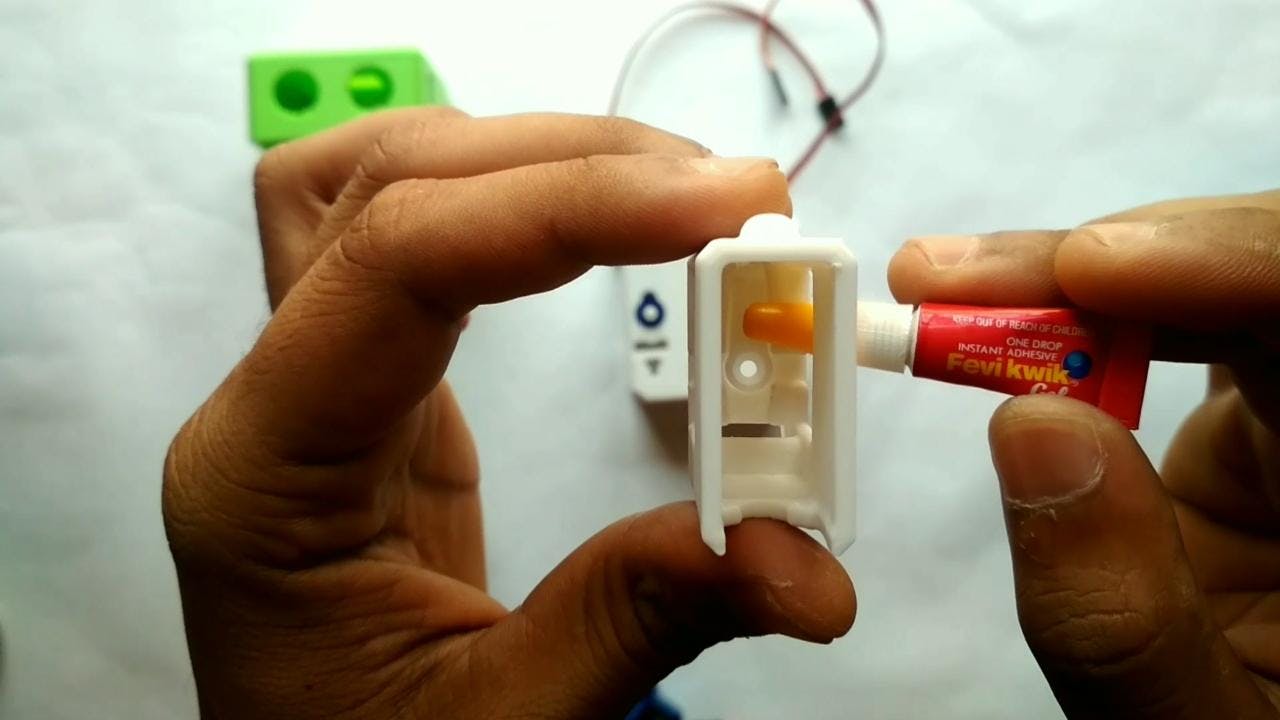
1 / 2
- 切割塑料顶部带有伺服。
- 如图所示,将其粘在腿的一侧。
第4步:通过脚伺服线
1 / 4
- 从腿上的孔穿过伺服线
- 从机器人的底部穿过相同的电线。
第 5 步:设置伺服 90 度连接
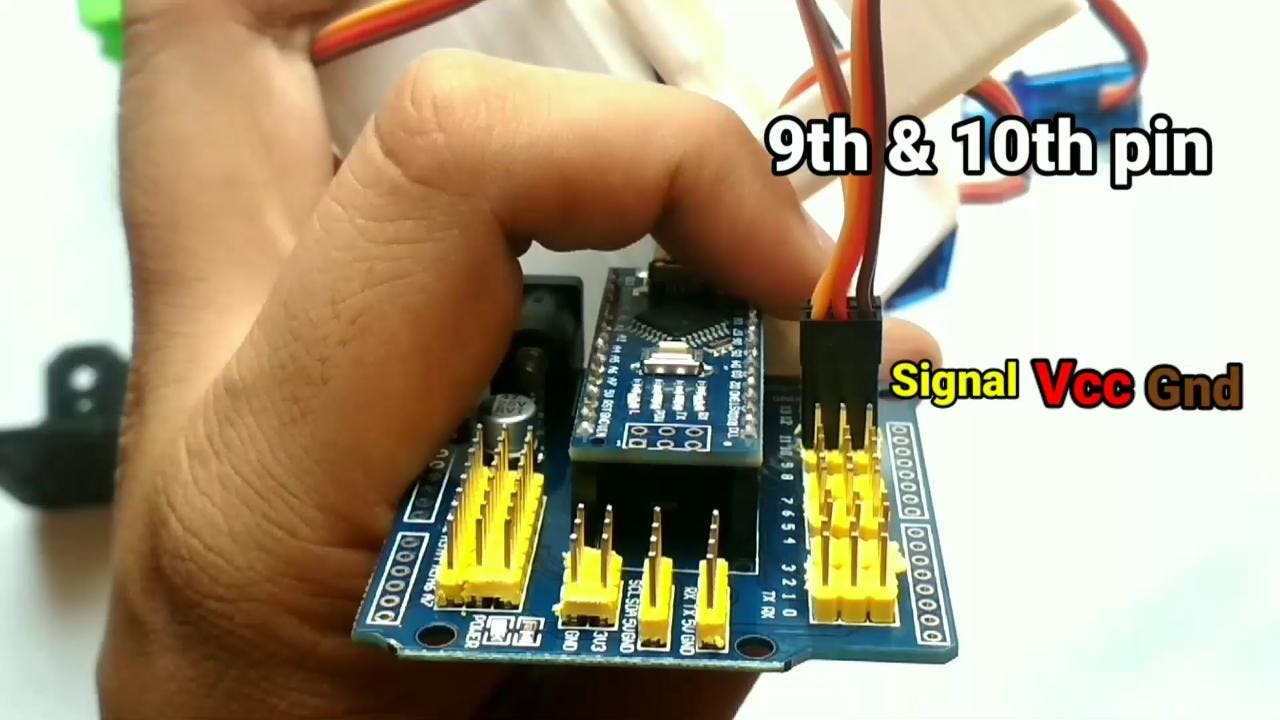
1 / 5
- 将腿安装在腿伺服上。
- 拿扩展盾并插入arduino nano。
- 在第 9 和第 10 针连接两个腿伺服。
- 确保黄线面向 arduino nano。
第 6 步:上传代码以设置 90 度
1 / 5
- 打开servo_pos_set代码,你可以从这里下载。
- 连接您的 arduino 并选择正确的 Board 和正确的端口。
- 上传代码,伺服将移动90 度。
- 如图所示,从伺服器上拆下腿并将其插入垂直位置。
下载代码:- https://github.com/vishalsoniindia/Arduino_Otto_Ro ...
________
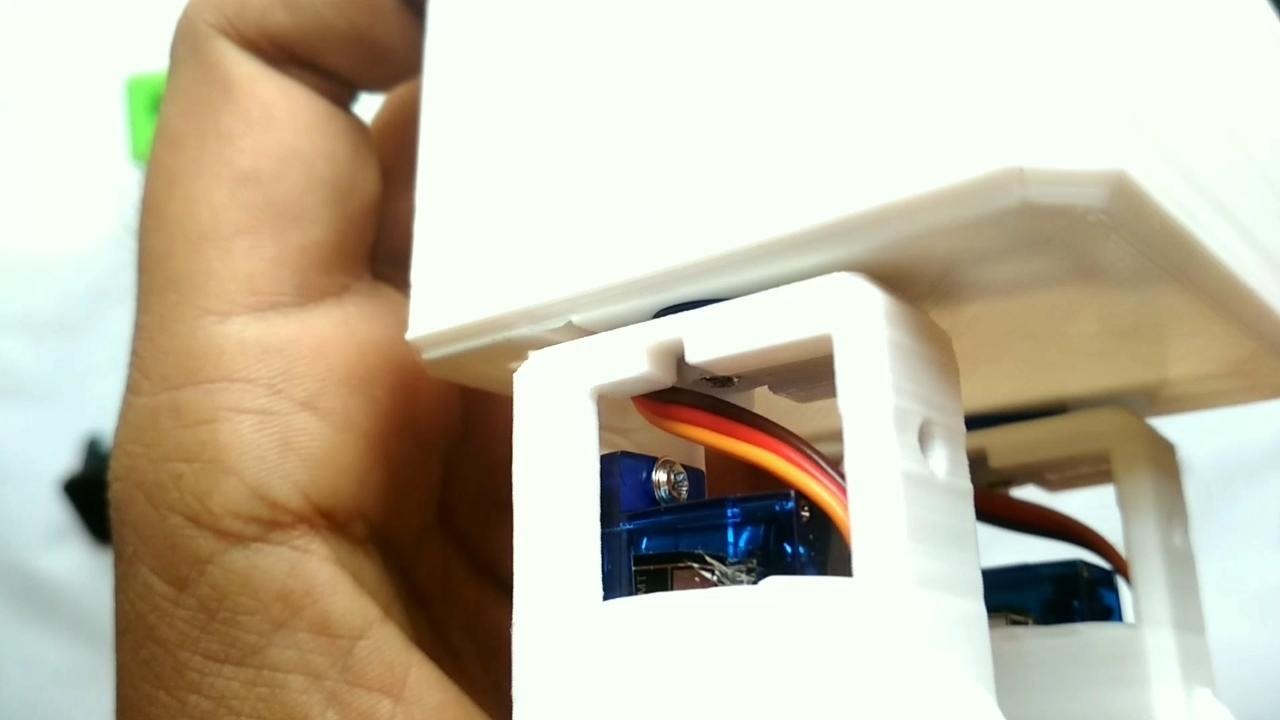
第 7 步:拧紧腿
1 / 3
- 用螺丝刀附上磁铁,这样螺丝就可以粘在上面。
- 握住腿并将其拧紧。
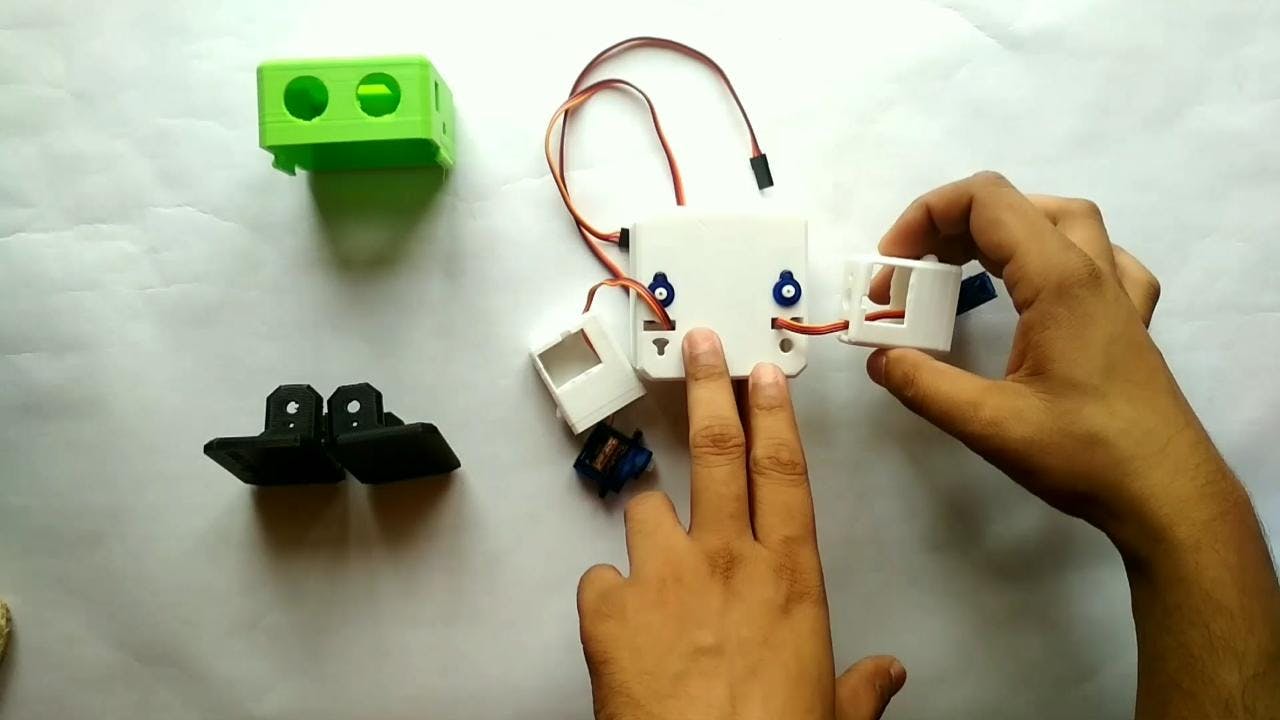
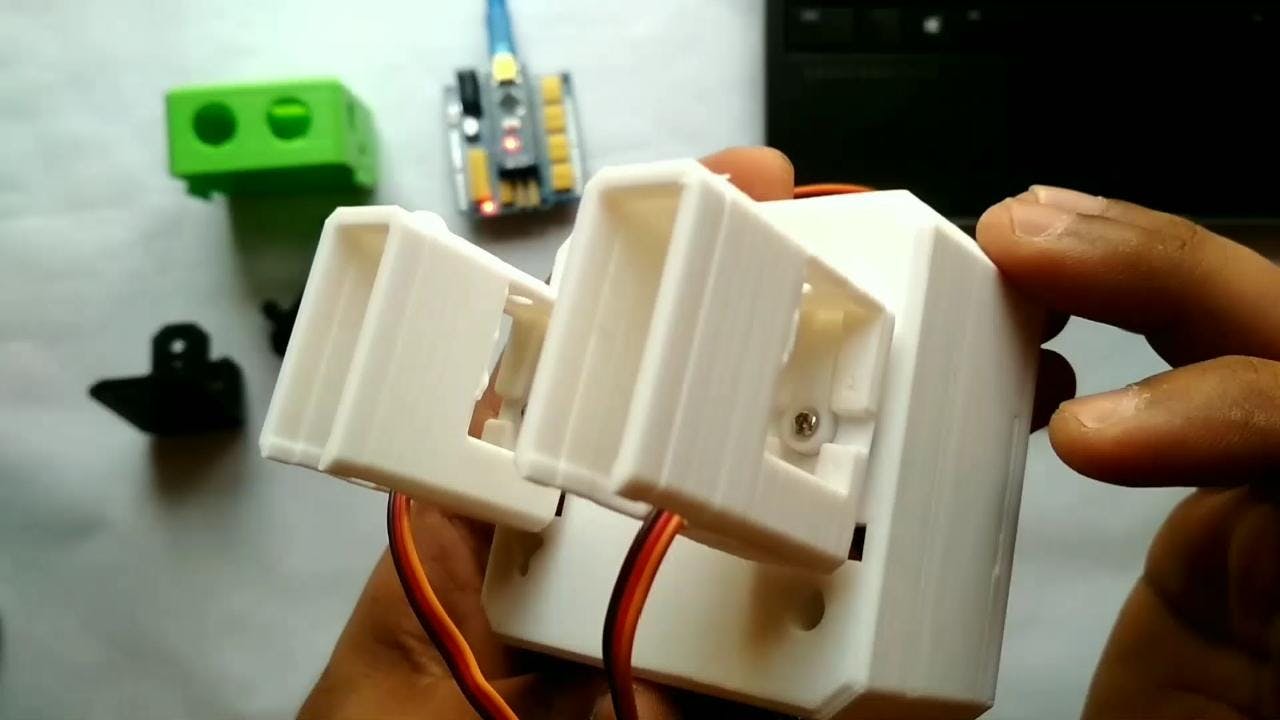
第8步:安装脚舵机
1 / 4
- 如图所示拉动脚伺服线。
- 如图所示,将脚伺服插入腿中。
- 将脚伺服拧在腿上。
第 9 步:将其设置为 90 度并安装脚
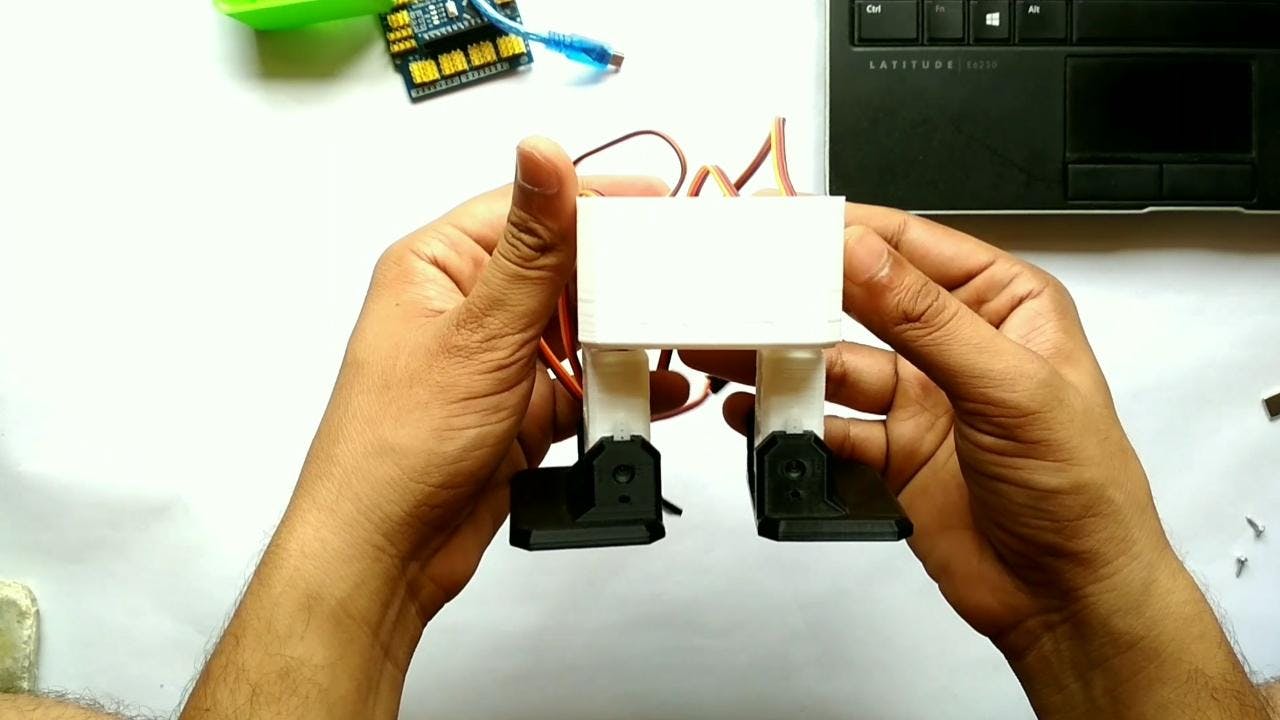
1 / 5
- 在第 9 和第 10 针连接脚伺服。
- 将arduino与pc连接,无需再次上传代码。
- 伺服移动到 90 度现在将伺服顶部安装在垂直位置并拧紧它们。
- 安装脚,首先将脚放在伺服上,并在里面放上小压脚。
- 两者都做。
第 10 步:134N3P 连接
1 / 5
- 从 134N3P 模块中移除 USB。
- 在B+处连接电池正极。
- 在B-处连接电池负极。
- 连接 Gnd 和 Vcc 上的电线。
- Vcc 线通过一个开关。
第 11 步:将电池与 Arduino 连接
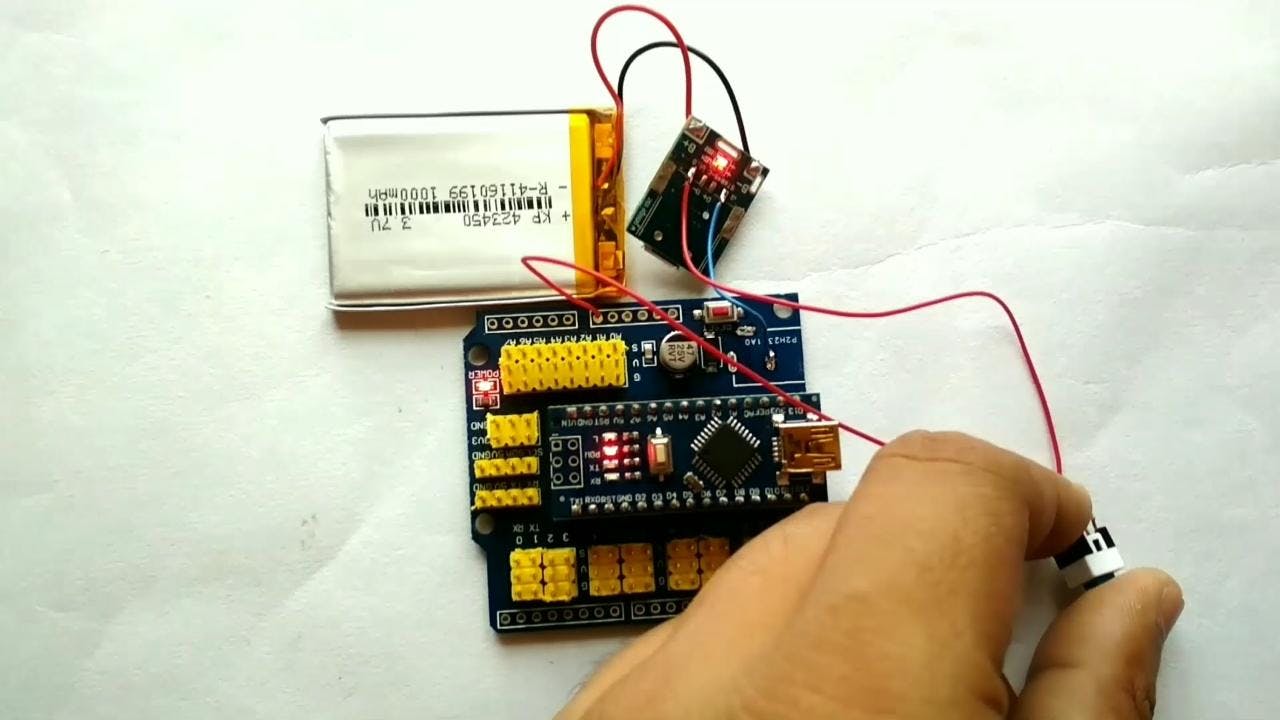
1 / 5
- 从扩展屏蔽中移除DC插孔。
- 如图所示,在DC 插孔的Gnd处连接Gnd线。
- Vcc通过开关,然后将其连接到Vin引脚。
- 测试开关是否正常工作。
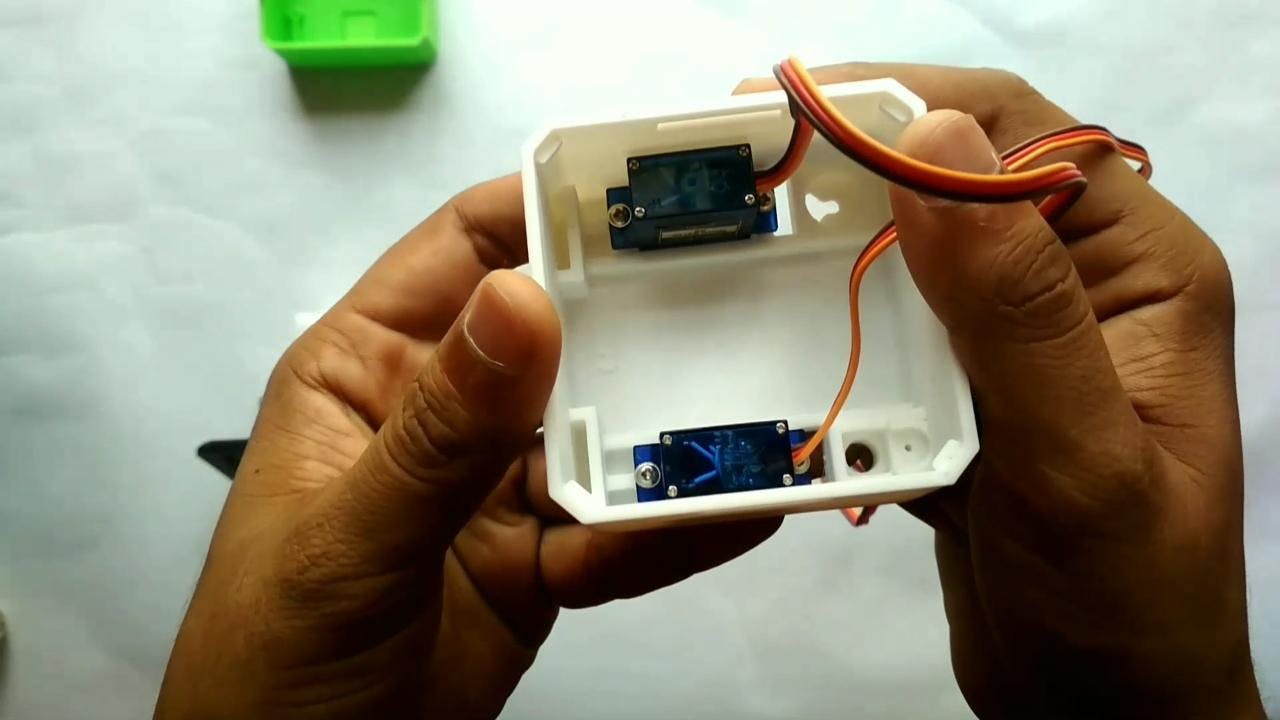
第 12 步:组装机器人的顶部
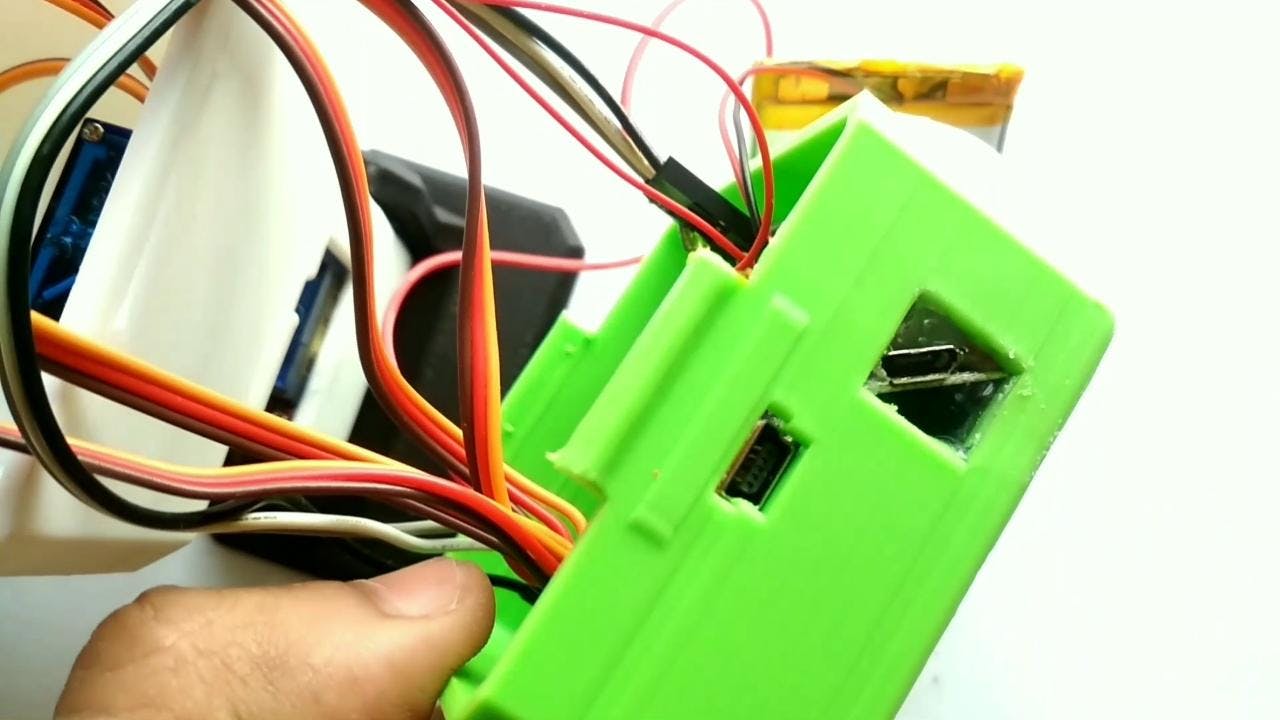
1 / 4
- 如图所示安装超声波。
- 如图所示安装膨胀罩并拧紧。
- 如图所示,用热胶将 134N3P 模块固定在直流插孔的位置。
步骤 13:Otto 机器人的电路连接
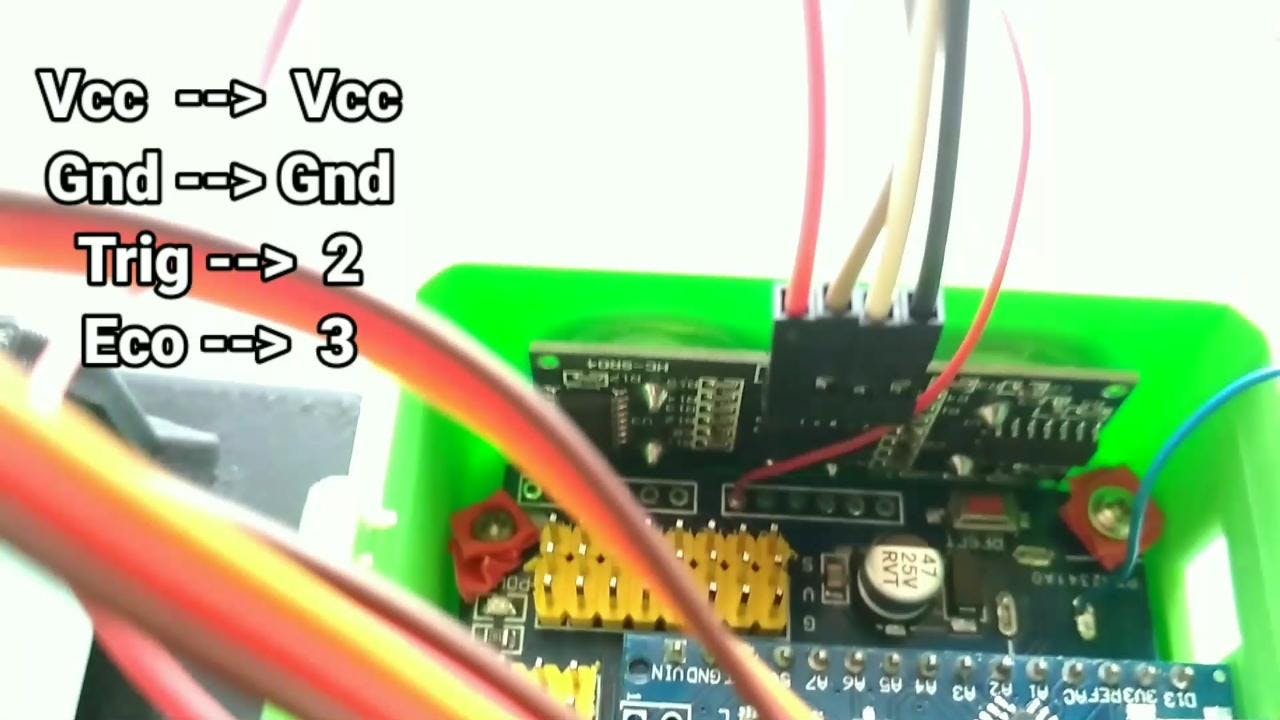
1 / 7
左腿伺服---------------> 8号针
右腿舵机--------------->第9针
左脚伺服---------------> 10号针
右脚伺服---------------> 11号针
超声波连接
Vcc ------------------> +5v
接地 ------------------> 接地
触发 -------------------> 2nd Pin
生态 -------------------> 第 3 针
第 14 步:关闭机器人

1 / 3
- 如图所示,将开关粘在里面。
- 为 Switch Cap 使用钢笔绗缝。
- 将所有东西插入机器人并关闭它。
第 15 步:安装库
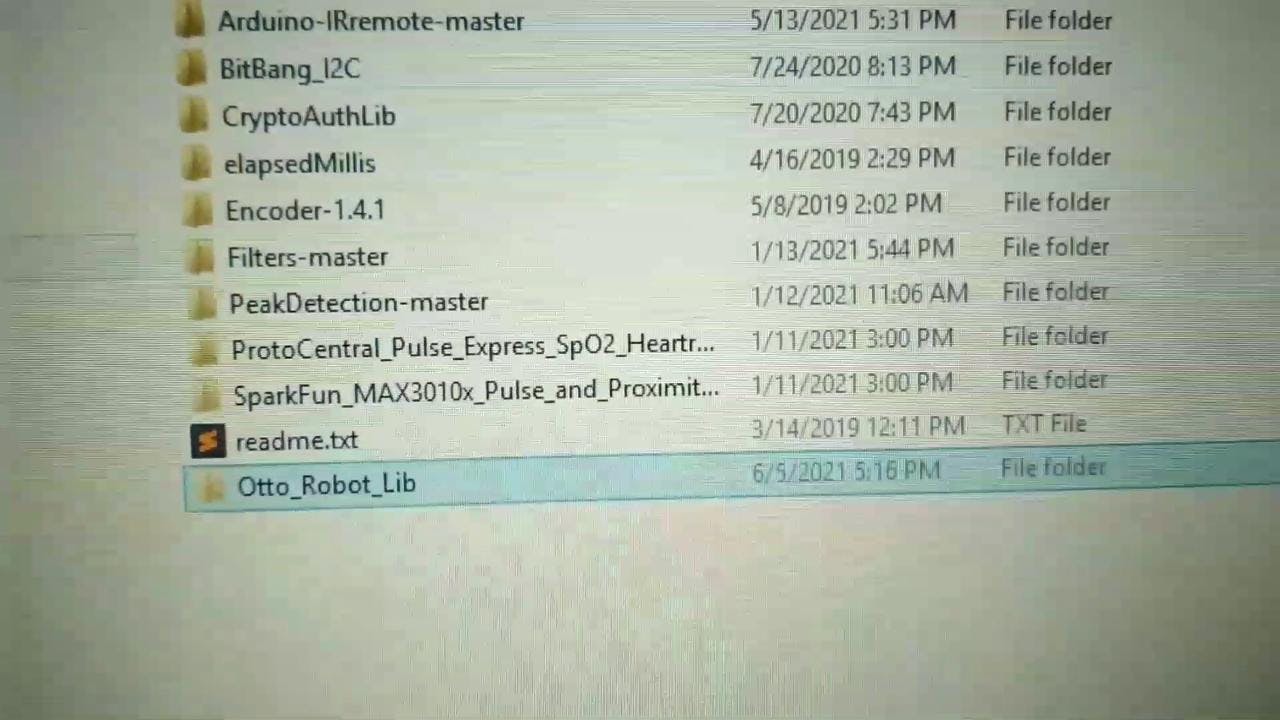
1 / 3
- 打开下载的文件夹,或者您可以从下面的链接下载。
- 转到Otto_robot_code >> 库 >>
- 复制Otto_Robot_Lib文件夹。
- 转到文档 >> Arduino >> 库 >>
- 将文件夹粘贴到此处。
下载文件夹:- https://github.com/vishalsoniindia/Arduino_Otto_Ro ...
第 16 步:上传代码
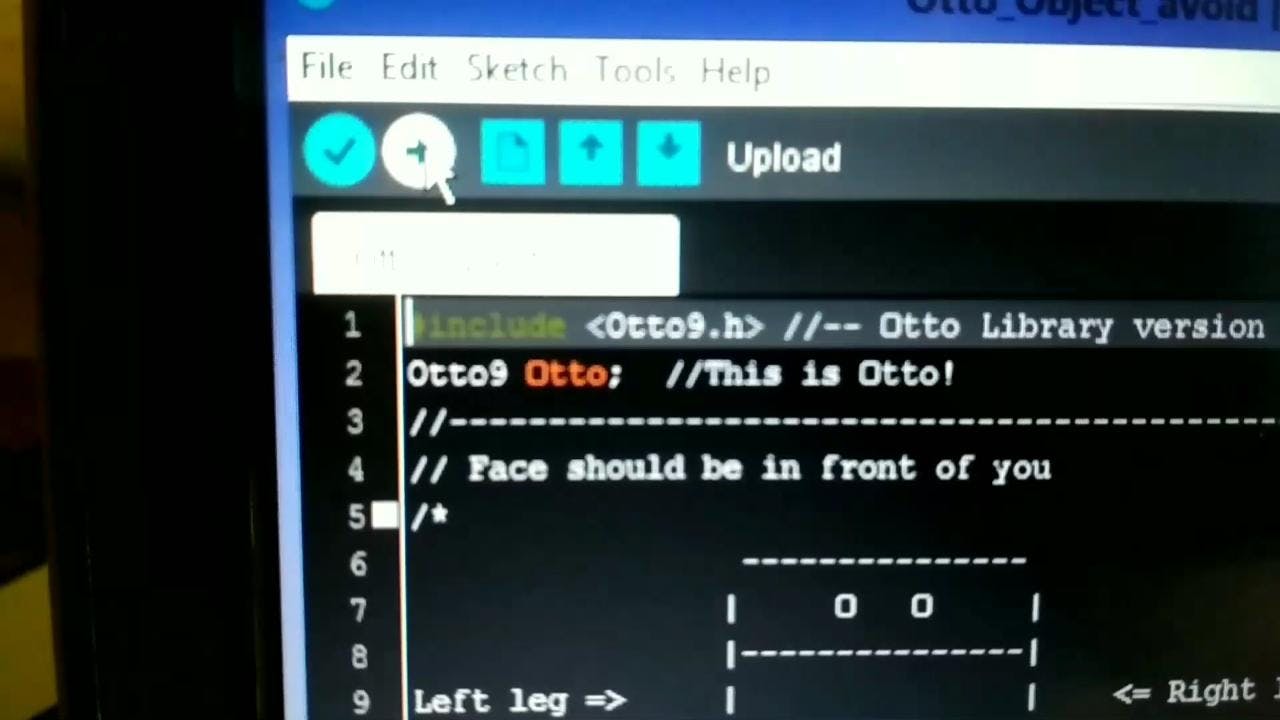
1 / 5
- 回到下载的文件夹。
- 在这里你可以上传任何代码,让我们打开Otto_object_avoid代码。
- 将机器人与 PC 连接,并确保板和端口正确。
- 将您的机器人倒置并上传代码。
- 你的机器人开始运行。
第 17 步:完成
1 / 2
呜呜呜…………
现在将手放在机器人的前面,它会停止返回,转动littlie bit并再次运行。
下载该资料的人也在下载
下载该资料的人还在阅读
更多 >
- 手势控制机器人开源项目
- Arduino机器人开源
- Arduino绘图机器人开源分享
- WiFi控制机器人开源项目
- 儿童助理机器人开源项目
- 消毒机器人开源项目
- 平衡segway机器人开源项目
- Arduino Uno迷你机器人开源分享
- Arduino机器人开源分享
- Arduino机器人Ludos开源
- Arduino ESP32多合一机器人开源
- 5合1 Arduino机器人开源项目
- 机器人开源项目
- 自主机器人开源项目
- Arduino教学机器人的使用教程免费下载 37次下载
- 字节发布机器人领域首个开源视觉-语言操作大模型,激发开源VLMs更大潜能 360次阅读
- 机器人技术中常用的路径规划算法的开源库 843次阅读
- 机器人项目涉及的技术 857次阅读
- 利用STM32实现自平衡机器人功能项目 873次阅读
- 如何使用Arduino制造一个自动平衡机器人 4429次阅读
- 基于使用Arduino板及电机驱动器对机器人进行编程介绍 3660次阅读
- 面对疫情 医疗机器人能帮上什么忙? 2126次阅读
- dfrobotSparki机器人套装简介 2064次阅读
- dfrobotDevastator履带机器人移动平台简介 1515次阅读
- 协作机器人的起源_为什么需要协作机器人 8127次阅读
- 如何区分机器人、协作机器人和移动机器人? 6828次阅读
- 软体机器人 前所未见的机器人 3692次阅读
- 机器人自动化工程项目方案设计包括的6个步骤解析 1.2w次阅读
- 11个机器学习开源项目 2767次阅读
- 基于Arduino的会打招呼的超萌机器人 3311次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论