 德赢Vwin官网
App
德赢Vwin官网
App











 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
你知道你可以用长曝光相机制作光绘吗?光绘是一种摄影技术,其中通过移动手持光源同时拍摄长时间曝光照片进行曝光。
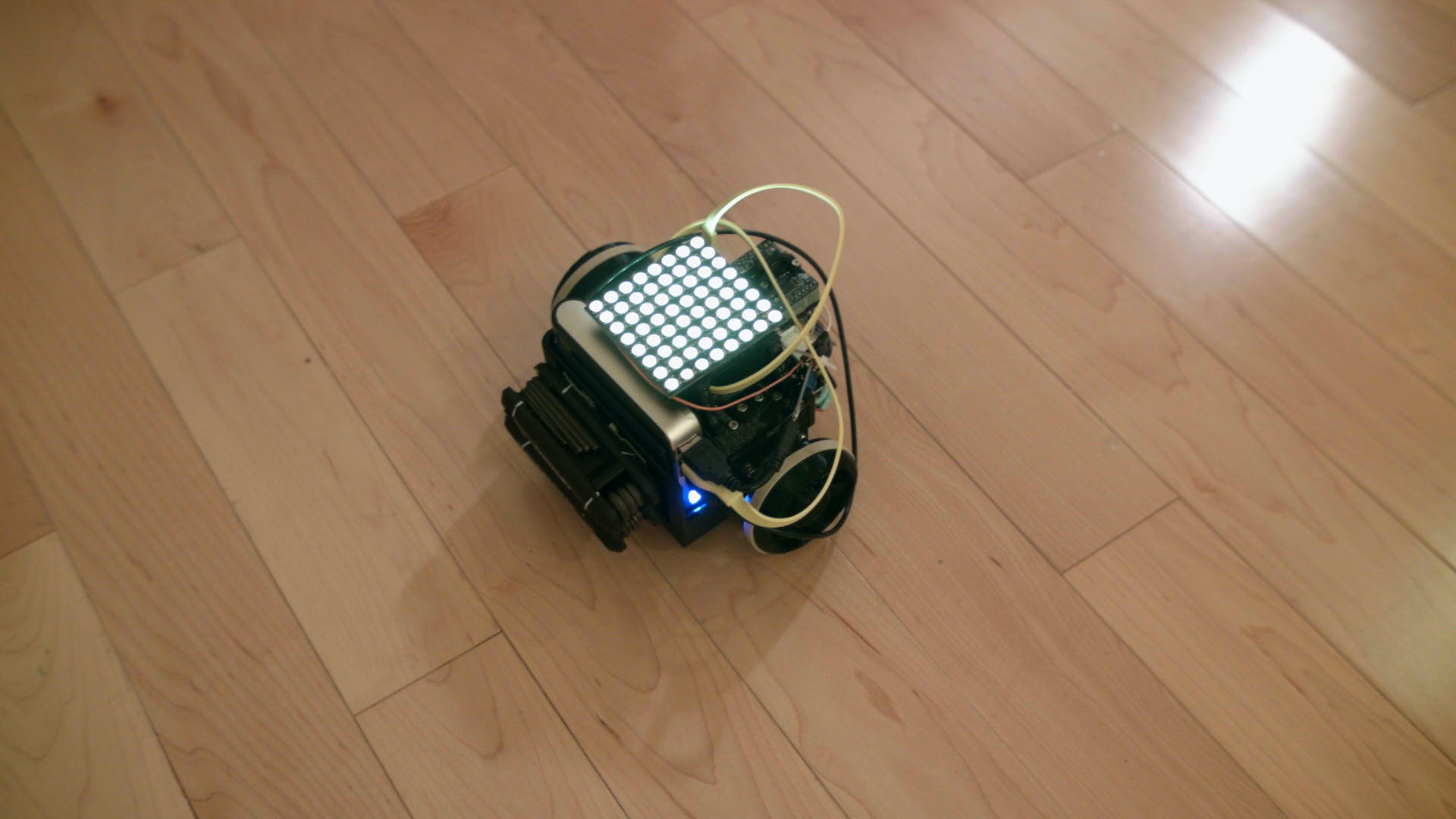
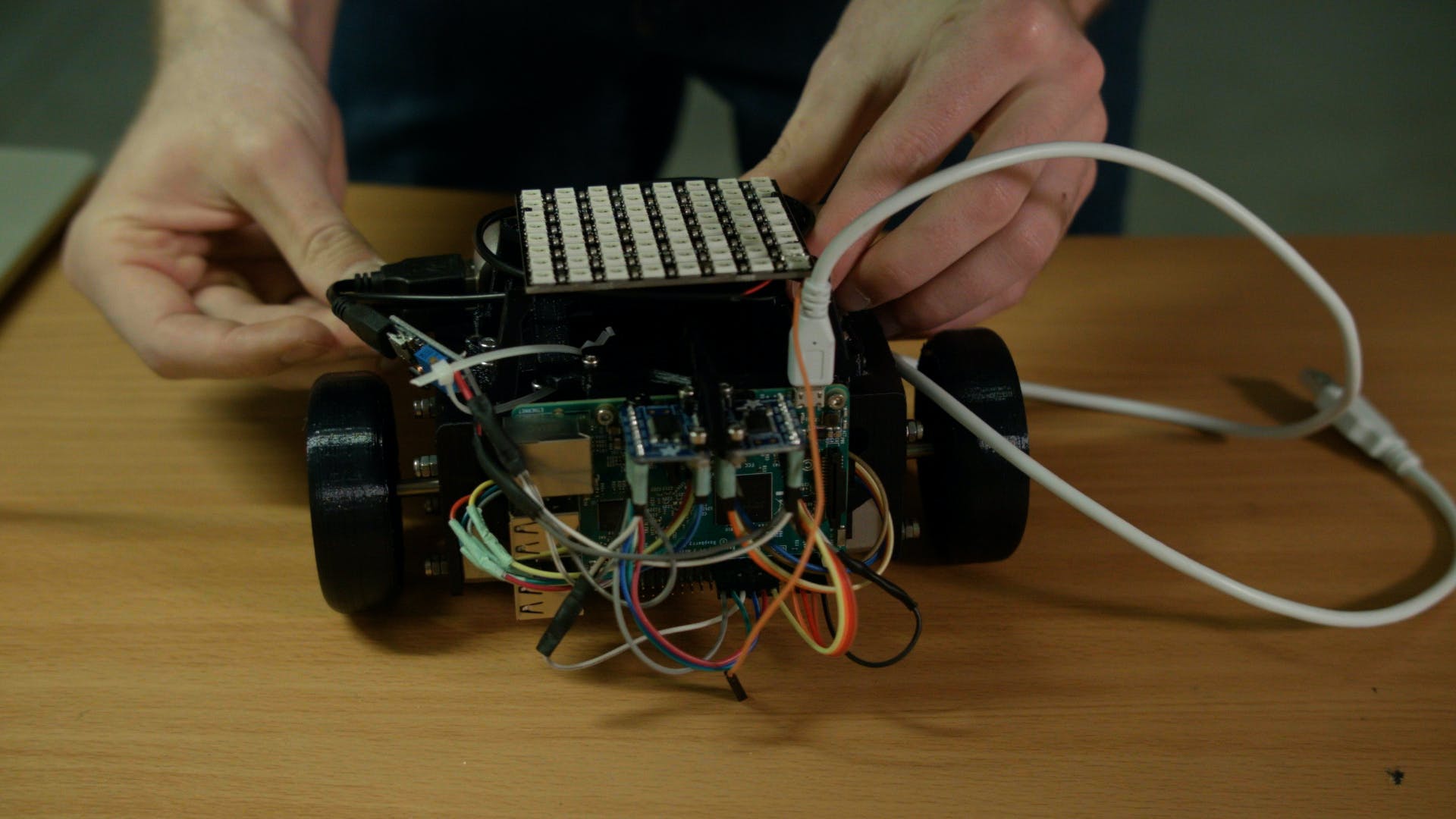
这是完成的漫游车的照片。
构建机箱
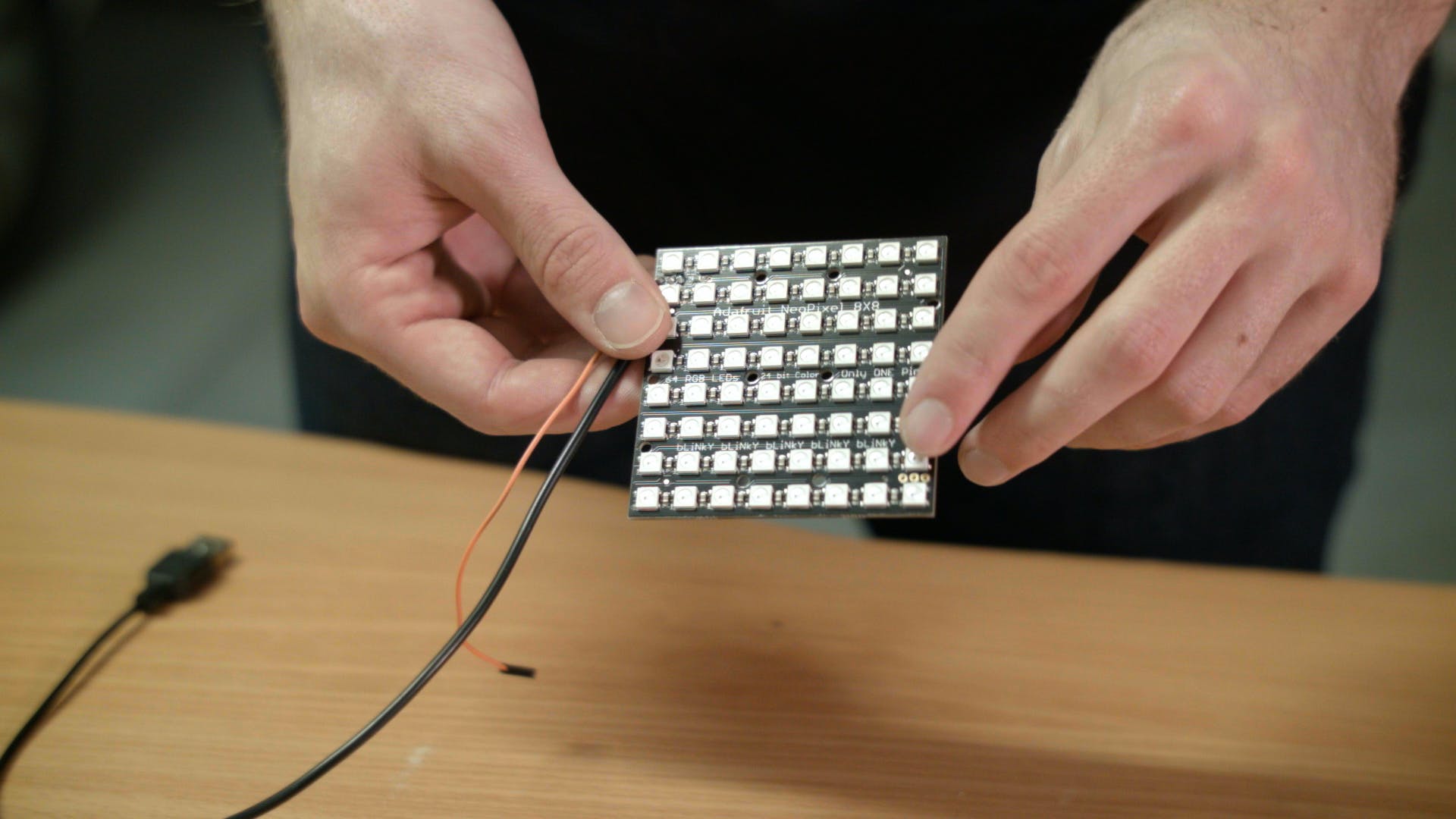
为了创建光摄影,我们将使用这个可编程的 8x8 LED 矩阵。我们之前在LED Hat项目中使用过灵活版本。社区中的大多数人通常使用 Arduino 来控制这些矩阵,但我们决定使用 Raspberry Pi,以便我们可以为软件存储更多图像数据并轻松从 Internet 下载新图像。
机器人底盘由几个不同的 3D 打印部件组成。不幸的是,零件的数量(以及这些零件的公差)太高了,所以我们决定不制定 MDF 版本的计划。如果您想自己制作并且没有 3D 打印机,您通常可以在公共图书馆/学校找到一台或使用在线3D 打印服务。
底盘有一个主底座,我们可以在其中连接所有零件和支架。从底座开始,我们在后面插入了一个小型便携式手机电池,并用一些 2.5 毫米的螺栓和螺母将我们的 Raspberry Pi 连接到前面。顶部连接了一个小支架,以便我们可以在需要时轻松移除 Raspberry Pi。

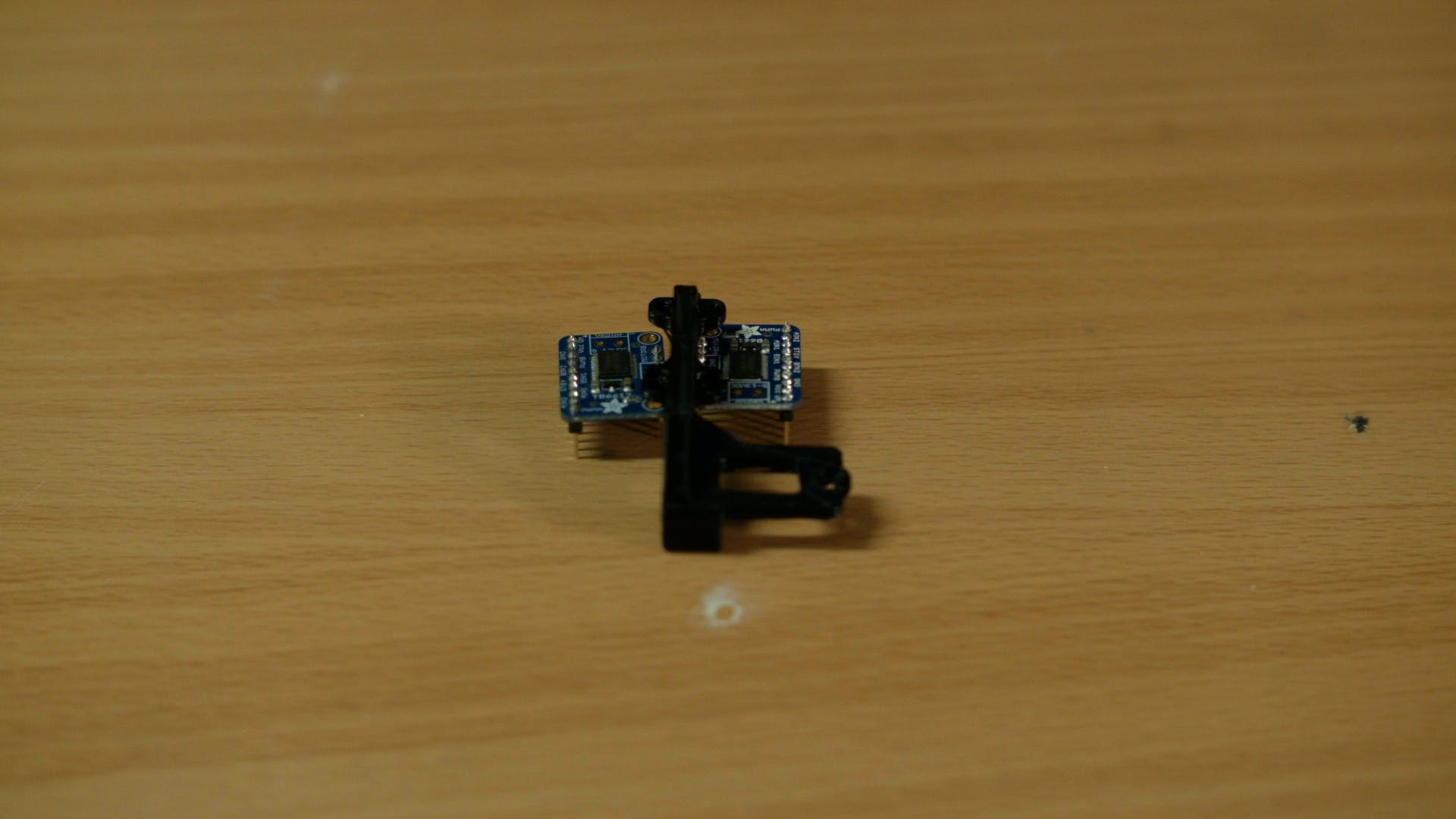
车轮由 2 个 NEMA 17 200 rev 步进电机驱动。使用了步进电机,以便我们可以做出精确的动作来绘制光绘图像。我们在这个项目中使用了两个步进电机分线板,而不是我们用于自动气枪炮塔的步进电机 HAT,因为我们发现它们在并行移动两个电机时抖动较小。两块板都用一个小的 3D 打印夹子和一些 2.5 毫米的螺栓连接到火星车的前部。
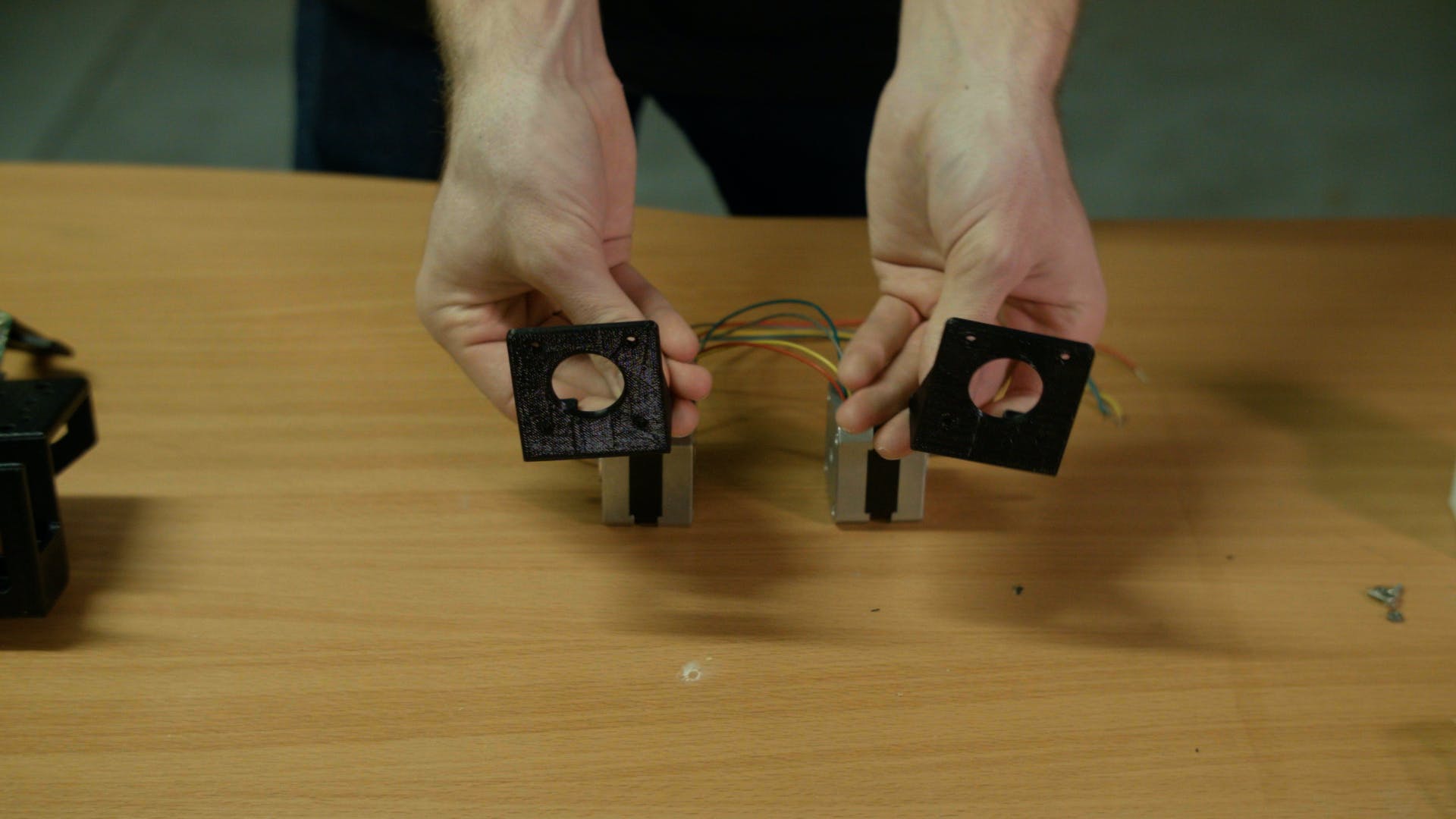
四个母跳线延长线焊接到每个步进电机。在另外两个支架的帮助下,它们安装在底盘下方。一些 3 毫米螺钉用于连接电机。由于我们的螺钉稍长,我们在螺钉头下方添加了几个机器人作为垫片。电线在 Raspberry Pi 下方布线并直接连接到分线板上。可以在此处找到这些分线板的接线指南。
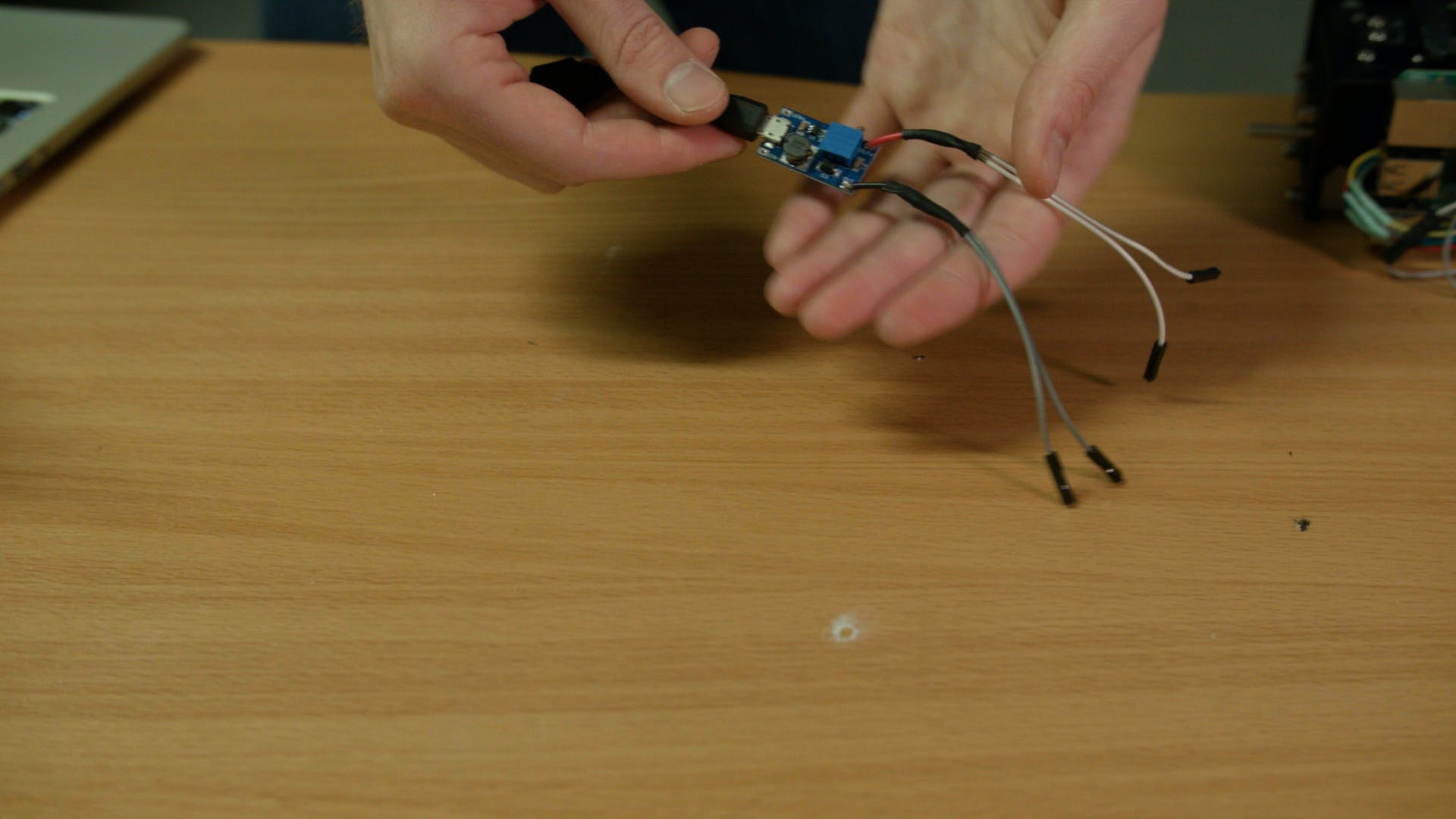
为了让步进电机与我们的电池一起工作,我们需要使用升压适配器将电压从 5v 放大到 12v。将两根电线焊接到放大器的接地/热销上,然后连接到步进电机分线板上。
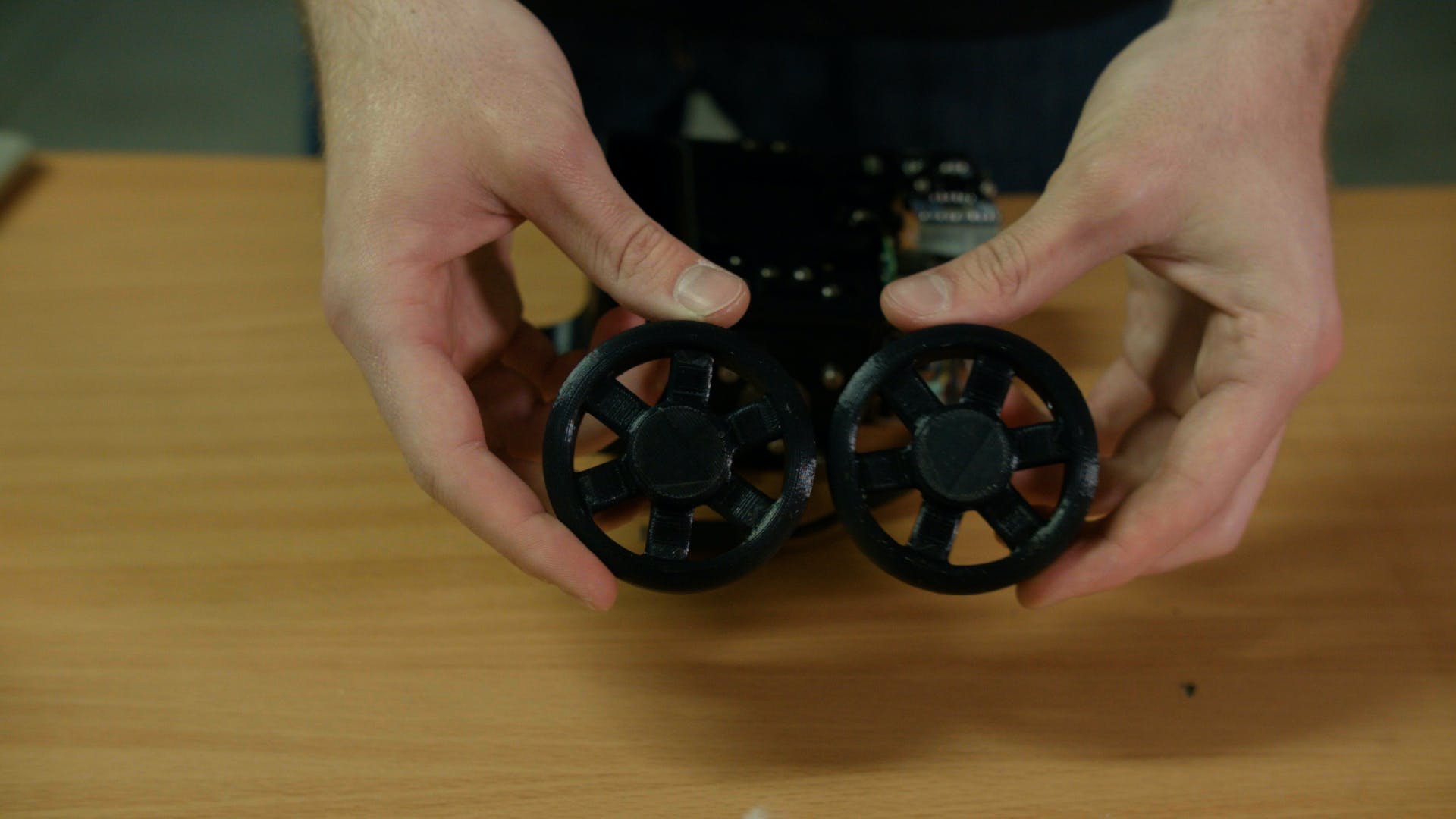
接下来我们安装了 3D 打印的轮子。每个轮子都连接到步进电机的轴上,并用一个小的 3mm 固定螺钉固定到位。在喷漆过程中,将几条小橡皮筋固定在车轮上以增加抓地力。
升压适配器和 Raspberry Pi 已插入 5v 电池。我们将 LED 矩阵与 3D 打印支架连接,并将信号线插入 Raspberry Pi 上的引脚 18。使用烙铁将小型 USB 电缆连接到 LED 矩阵上的 +/- 端子。这个 USB 也插入了 5v 电池。
运行代码
确保安装以下依赖项:
Pillow
RPi.GPIO
numpy
我们还使用了一个自定义的 Raspberry Pi Neopixel 库,在这里可以找到:https ://github.com/jgarff/rpi_ws281x
按照 Raspberry Pi 安装说明进行操作。
在 light_rover.py 的底部,我们为所有组件配置了引脚。确保这些引脚正确。
stepper1 = Stepper(2, 3, 4, 17)
stepper2 = Stepper(27, 22, 10, 9)
led_matrix = create_strip(64, led_pin=18)
绘图向量
矢量图像用于表示计算机图形中的图像。它们由具有大小和角度的几条线组成。您可以通过对代码进行一些修改来让您的轻型机器人绘制矢量图形。
确保以下部分在末尾被注释掉light_rover.py:
#if imageFile:
# rover.paint_image(imageFile)
#else:
# print "No image file provided!" exit(1)
取消注释以下行:
rover.paint_vector(dog, single_value_affects_pixels=[27, 28, 35, 36])
从vector_drawings.py 文件中选择一个向量并在函数中更改该值paint_vector 。
要运行,请确保您在项目目录中并执行:
sudo python light_rover.py
绘图图像
您还可以使用 LED 矩阵逐像素绘制图像。小图像(~100px x 100px)通常效果最好。确保以下部分在末尾被注释掉light_rover.py:
# rover.paint_vector(dog, single_value_affects_pixels=[27, 28, 35, 36])
取消注释以下行:
if imageFile:
rover.paint_image(imageFile)
else:
print "No image file provided!" exit(1)
要运行,请确保您在项目目录中并执行:
sudo python light_rover.py images/sb.png
它是如何工作的?
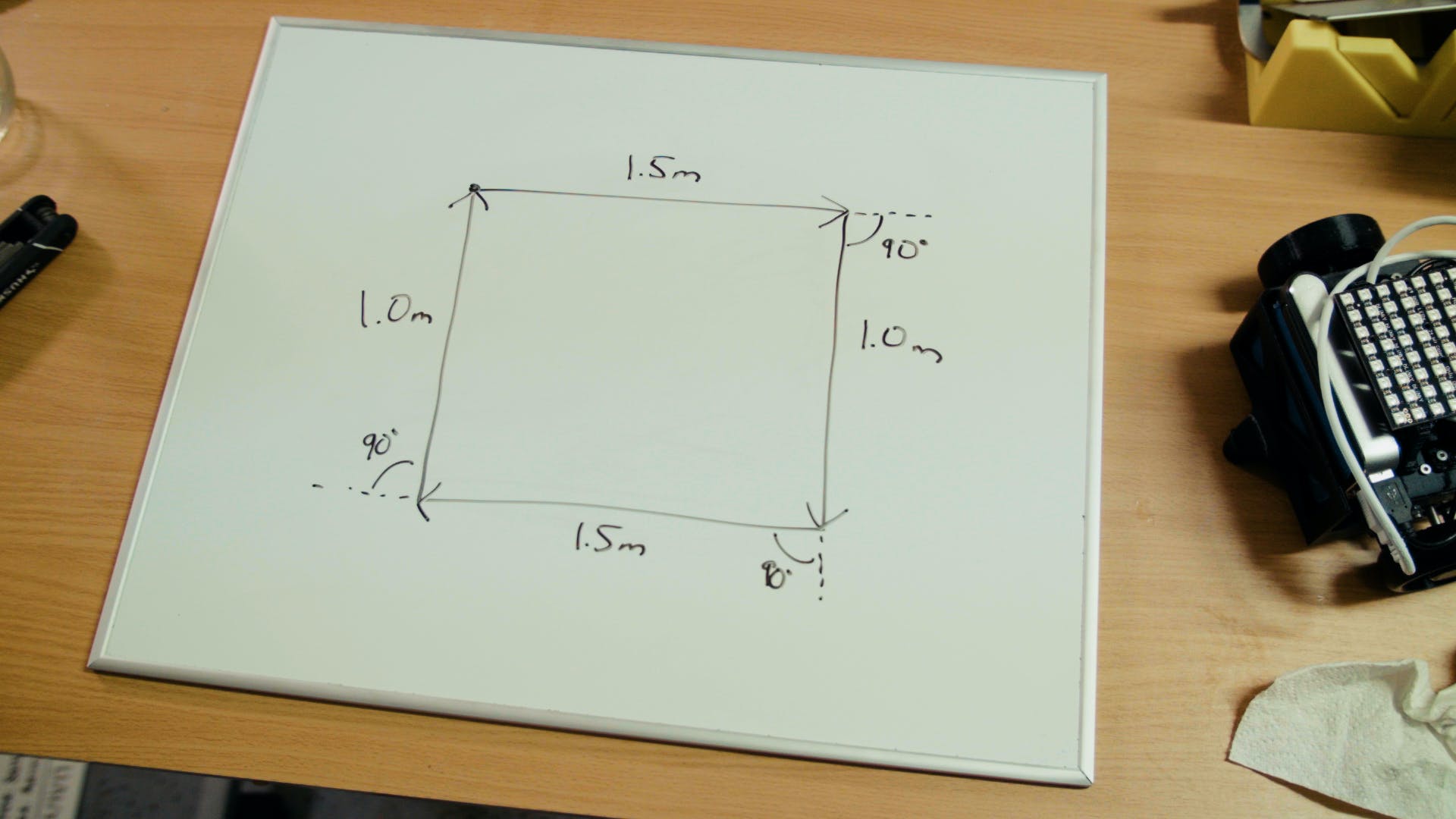
连接到漫游车车轮上的两个步进电机可以进行微调转弯,在相机快门打开时将漫游车移动到指定的路径上。矢量图像是通过将漫游车发送任意距离,然后转动任意角度以排队等待下一次运动来创建的。使用这种技术,我们能够绘制几个不同的直线图像。
如果要创建自己的矢量绘图,请在以下位置添加一个新的矢量数组:
vector_drawings.py
如:
rectangle = [LightVector(1000, 90, [[0, 255, 0]]),
LightVector(800, 90, [[0, 255, 255]]),
LightVector(1000, 90, [[0, 255, 0]]),
LightVector(800, 90, [[0, 255, 255]])]
LightVector 采用以下参数:
def __init__(self, steps, angle, pixel_data):
"""
:param steps: number of steps to move
:param angle: angle to turn after the movement
:param pixel_data: a 2d array of pixel data [[r, g, b]...n] where n is the number of pixels in the matrix
"""
图像的绘制方式略有不同。我们没有将流动站移动到一系列矢量上,而是分割出图像的 8x8 部分,并在流动站从图像的右上角逐行移动到左下角时,在 LED 矩阵上闪烁这些像素。每次闪光后,流动站的移动刚好足以排列图像中的下一组像素。
通常,小于 120x120 像素的图像最适合光绘。我们的程序会自动为您分割图像。
拍照
要拍照,请确保将相机放置在足够高的位置以捕捉整个图像。关闭所有灯并确保您的相机处于灯泡定时器模式。
在某些相机上,您必须按住快门按钮才能捕捉图像,但如果可以的话,最好设置一个自动定时器。
我们的相机在低 ISO 设置下使用 5 分钟曝光,镜头光圈降至 f/10。我们发现这样可以产生最好的光绘图像,而不会让房间中的一些环境光泄漏。

测试一下!
现在您已经构建了您的漫游车,继续尝试吧!如果您制作了任何有趣的新图片,请务必将它们发布在这里,以便我们查看。
- YolkaBot机器人开源分享
- 检测机器人开源分享
- Arduino机器人开源
- 坦克机器人开源分享
- 扫地机器人开源资料 43次下载
- 机器人守卫开源分享
- 伺服机器人开源分享
- 堆肥机器人开源分享
- 英雄机器人开源
- 机器人开源案例
- Arduino机器人开源分享
- 助理机器人开源分享
- 机器人开源项目
- 基于DSP和PC的农业机器人控制系统 17次下载
- 开架式通用水下机器人开源搭建手册.pdf 11次下载
- 字节发布机器人领域首个开源视觉-语言操作大模型,激发开源VLMs更大潜能 360次阅读
- 机器人技术中常用的路径规划算法的开源库 843次阅读
- 使用libcamera函式库操控树莓派摄影机 1676次阅读
- 光伏组件智能清洁机器人设计方案 2730次阅读
- 面对疫情 医疗机器人能帮上什么忙? 2126次阅读
- dfrobotSparki机器人套装简介 2064次阅读
- 工业机器人编程入门_工业机器人的编程要求 9571次阅读
- 医用机器人的定义_医用机器人发展 3122次阅读
- 医用机器人的功能_医用机器人分类 2227次阅读
- 协作机器人的起源_为什么需要协作机器人 8127次阅读
- 机器视觉的机器人取代四台传统的火焰处理机器人 3270次阅读
- 如何区分机器人、协作机器人和移动机器人? 6828次阅读
- 软体机器人 前所未见的机器人 3692次阅读
- 机器人的最佳编程语言是什么?机器人十大流行编程语言汇总 3.4w次阅读
- 奥比中光正式发布应用于家庭机器人系统的Face ID应用 4859次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论