完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
标签 > 指纹传感器

指纹传感器(又称指纹Sensor)是实现指纹自动采集的关键器件。指纹传感器按传感原理,即指纹成像原理和技术,分为光学指纹传感器、半导体电容传感器、半导体热敏传感器、半导体压感传感器、超声波传感器和射频RF传感器等。
指纹传感器(又称指纹Sensor)是一种传感装置,属于光学指纹传感器半导体指纹传感器一种,是实现指纹自动采集的关键器件。
指纹传感器的制造技术是一项综合性强、技术复杂度高、制造工艺难的高新技术。
指纹传感器(又称指纹Sensor)是实现指纹自动采集的关键器件。指纹传感器按传感原理,即指纹成像原理和技术,分为光学指纹传感器、半导体电容传感器、半导体热敏传感器、半导体压感传感器、超声波传感器和射频RF传感器等。指纹传感器的制造技术是一项综合性强、技术复杂度高、制造工艺难的高新技术。
指纹传感器(又称指纹Sensor)是一种传感装置,属于光学指纹传感器半导体指纹传感器一种,是实现指纹自动采集的关键器件。
指纹传感器的制造技术是一项综合性强、技术复杂度高、制造工艺难的高新技术。
指纹传感器(又称指纹Sensor)是实现指纹自动采集的关键器件。指纹传感器按传感原理,即指纹成像原理和技术,分为光学指纹传感器、半导体电容传感器、半导体热敏传感器、半导体压感传感器、超声波传感器和射频RF传感器等。指纹传感器的制造技术是一项综合性强、技术复杂度高、制造工艺难的高新技术。
半导体指纹传感器因其制造工艺复杂,单位面积上传感单元多,包含高端的IC设计技术、大规模集成电路制造技术、IC芯片封装技术等,所以半导体指纹传感器几乎全部是由IC技术发达的国家或地区,如美国、欧洲、台湾等地设计、制造的。一颗不足0.5平方厘米的晶片表面集成了10000个以上的半导体传感单元。内部还包括了自动增益电路和逻辑控制芯片,以及串行、并行、USB等接口电路。目前半导体指纹传感器的灵敏度高,分辨率也达到了500dpi或以上。其功能已经突破了单一的传感能力,加上软件配合,可以用做全向导航器。半导体指纹传感器目前朝小型化方向发展。2004年以前以1平方厘米见方的方型为主,目前多为滑动式SWIPE芯片。全球最小的滑动式采集芯片只有12x5 mm,是由Authentec最近推出的1610。光学传感器中存在棱镜,其体积较大,一般为半导体的几倍甚至10倍大小,所以限制了其在小型设备上的应用。在类似考勤机、门禁等大设备上使用没有体积限制的问题,但在U盘、移动硬盘、手持设备上使用,体积成了最大的障碍,所以光学指纹传感器也出现了滑动式的。
工作过程
线性指纹无线传感器获得指纹图像的方法包括:
1、通过指纹无线传感器顺序地捕获指纹图像条带;
2、指纹无线传感器把扫描的指纹图像条带分成预定的段;
3、通过把每一图像条带和它的段与下一图像条带进行比较,检测最佳重叠区域;
4、计算通过重叠区域的平均图像过渡的平均值;
5、把应用平均图像过渡值的整个图像混合到每一图像条带。
这种传感器获取指纹的方法通过估算和补偿指纹传感器扫描的图像大大改善了正确识别率,并精确地把图像复原到原来的图像。这就是指纹考勤机的工作过程。
指纹传感器工作原理及提高匹配性能的方法
指纹识别过程同所有的生物体特征识别的过程类似,分为用户注册和特征匹配2个部分。首先,需要录入指纹图像,对获取的原始图像进行处理,包括图像增强、分割、细化、二值化等。然后,对指纹的细节特征进行提取,比较常见的特征点有分叉点、端点,最后,生成模板储存在系统数据库中。无论是验证或者辨识的过程,都需要将待识别的用户的指纹图像再一次进行同样的图像分割、细化、二值化、特征提取等一系列步骤,生成和数据库模板同样的数据格式,最后,进行比对,得出识别的结果。
现有的指纹识别算法的前提条件是使用相同的指纹识别器上采集指纹或认证。所以,在网上的很多用户只能用同一类指纹识别器才能实现认证,实践证明:如果换作不同的指纹识别器,验证系统的性能将大大降低,这是因为指纹识别器没有标准的互换规定。
由于各种识别器的使用算法的不同,要使用指纹识别器的各系统需要个别的登录,而且,认证时必须使用与登录时使用的识别器类型相同。这说明个人和系统需要保留多个不同种类的识别器。解决不同识别器之问的通用算法就成为目前研究的一个很有意义的课题,这样,用户可以在自己的电脑上使用不同的识别器,方便了在线指纹验证系统的使用价值。
由于某类指纹传感器仅仅适合同种类型的采集仪验证使用,为了允许更多的用户使用和阻止假冒用户试图欺骗系统,多传感器指纹融合提高系统的性能显得很有必要。本文提出一种简单的融合策略研究了两类常用的指纹传感器一光学传感器和电容传感器。两类传感器分别采集两幅图像后通过预处理程序提取细节点后分别与模板指纹相匹配,得到2个匹配分数,然后,把这2个匹配分数通过融合规则得到最后的匹配分数,通过与单一传感器性能比较表明:融合后的结果对系统的性能有了很大的提高。
1提出的融合框架
图1为提出的多传感器指纹验证系统框架图。首先,通过光学和电容传感器采集用户的指纹图像。然后,对图像进行预处理和分别提取两类传感器采集的指纹图像的特征,基于细节点的匹配算法被分别应用到光学和电容细节点集,因此,有2个匹配分数,并使用融合规则融合这些分数。
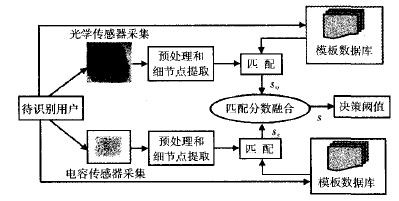
图1多指纹传感器验证系统框架图
1.1指纹传感器的类型和工作原理
由于当今指纹传感器规格很多,但是,至今仍然没有一个恰当和统一的协议和标准。目前,市场上现有的传感器主要有光学传感器和电容式传感器两类。
1.1.1光学传感器工作原理
它的基本原理如下:将手指按压在玻璃平面的一侧,在玻璃的另一侧安装有LED光源和CCD摄像头,LED发出的光束以一定的角度照射向玻璃,摄像头用于接收从玻璃表面反射回的光线。手指上的脊线与玻璃表面接触,谷线不与玻璃表面接触,因此,照射在指纹脊线所接触部分的玻璃表面的光线被漫反射,而照射在指纹谷线所对应的玻璃表面的光线被全反射,从而在由CCD摄像头捕获的图像中,对应指纹脊线的部分颜色较深,对应指纹谷线的部分颜色较浅。
1.1.2电容传感器工作原理
电容传感器原理根据按压到采集头上的手指的脊和谷在手指表皮和芯片之间产生不同的电容,芯片通过测量空间中的不同的电磁场得到完整的指纹。由这一构造原理,可以大大地提高指纹的防伪性。伪造的指纹一般用硅树脂或者白明胶等绝缘材料,在电容传感器上是无法成像的,这样使伪造的指纹无用武之地。但电容技术的芯片昂贵,且易受到干扰。
1.2指纹图像处理
在该识别过程中,首先,通过指纹采集仪器采集到指纹J,由于采集指纹图像时图像质量不高或者在捺取指纹过程中因用力不均造成指纹畸变,常常会造成指纹图像分割的不准确,给后续的指纹识别带来更大的困难,造成指纹自动识别系统的拒识或误识,所以,指纹采集后的第一个关键技术就是对采集到的指纹图像进行预处理,包括对指纹图像的增强、二值化和细化等。预处理完成后即可进行特征提取,然后,进行特征匹配,输出匹配结果,如图2。
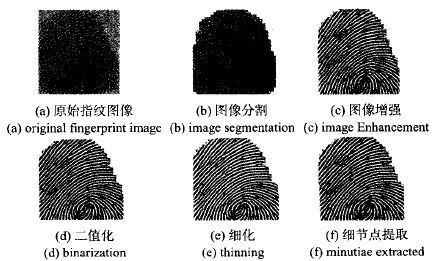
图2指纹图像预处理步骤
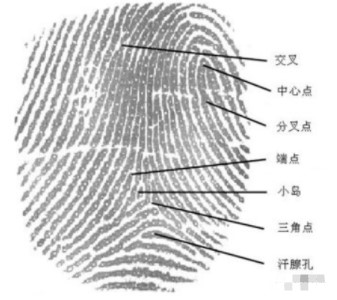
最后,细节点被提取出来,细节点定义为:端点和分又点(如图3),纹线端点是一条纹路的终结点,而纹线分叉点是一条纹路再次分开成为两条纹路的点。这2种特征点在指纹图像中出现的几率最大、最稳定,易于检测,而且,足以描述指纹的唯一性。

图3指纹细节点类型
两幅指纹图像的匹配主要是解决旋转、平移和形变等问题。本文中,指纹匹配的输入是2个特征点的点集尸与Q,其中一个点集P是从输入的指纹图像中提取出来的,另一个点集合Q则是预先从标准的指纹图像中提取出来储存在模板库中。这2个点集合分别表示为
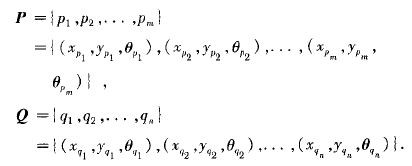
其中,电容传感器工作原理记录了点集P中第i个特征点的3条信息:坐标、Y坐标与方向,电容传感器工作原理则记录了点集Q中第j个特征点的3条信息:x坐标,y坐标与方向。假设两幅指纹图可以完全匹配起来,则可通过对输入的指纹图作某种变换(旋转、平移与伸缩)得到模板中的指纹图,因此,点集P可以通过旋转、平移与伸缩等变换近似成点集Q。
为了能够将输入指纹图像中的某一个特征点按照一定的变换方式转换成模板指纹图像中的相对应位置,需要知道相应的变换因子,△x与△y分别为x,y方向上的平移因子,△θ则是旋转因子。匹配基准点的确定是通过判断这2个三角形的相似程度得到的,在求取了两幅指纹图像之间的匹配基准点和变换因子后,本文对待识别指纹相对于模板指纹进行旋转、平移变换,以便判断两枚指纹是否来自于同一个手指。在本文中,求取变换后的待识别指纹的特征点坐标位置和所在区域的纹线方向。然后,将变换后的待识别指纹特征点集叠加到模板指纹特征点集上,检测2个特征点集合中相重合的特征点数目。由于本文中的匹配是一种非精确匹配,即使是一对匹配的特征点对,它们之问也不会完全重合,总是在位置、方向上存在有一定的偏差,所以,必须有一定的偏差容忍度。
为此,本文采用一种称为界定盒的方法。对模板指纹特征点集中的每一个特征点,选取它周围的一个矩形区域作为它的界定盒,只要变换后的待识别指纹中的特征点经过叠加后落在这个区域之内,而且,方向基本一致,可以认为这2个特征点对是一对匹配的特征点。
最后,算法统计所有相匹配的特征点数目,通过式(1)转换成匹配分数,其中,maxscore是通过叠加匹配的细节点个数得到的最大匹配得分,Temp—Num和Input—Num分别是模板和输入指纹的细节点数目。

计算的匹配分数代表了相比较的两幅指纹的相似程度。参数值越大,相似性程度越高,而如果得分较小时,说明这一用户不一定是其宣称的用户,访问将被拒绝。
本文所使用的算法是一种典型的基于特征点坐标模型的点模式匹配算法。它对匹配过程中最难的一步一基准点的确定和变换参数的求取作了较深入的研究,根据3个近邻的特征点之间的相互关系来确定基准点、求取变换参数。该算法在一定程度上能够加快基准点的求取,从而提高整个匹配算法的速度。同时,该算法是根据多点来确定变换参数,而不是通常意义上的一点,在一定程度上可以消除在特征提取过程中所引入的位置、角度的偏差,得到更为准确的变换参数。
1.3光学和电容传感器的融合
So,Sc是分别由光学传感器和电容传感器采集的图像运用匹配算法所获得的匹配分数,s融合后的分数和S。So,Sc之间有如下关系
![]()
将S和设定的阈值相比较:if:S>threshold系统允许进入,为真;否则,系统拒绝该用户,当然,上述方法也可用于2只以上的,。
根据方程(2)研究了两种类型的匹配分数转换执行融合规则,第一种类型融合规则属于所谓的固定融合规则,因为它们不需要参数估计,尤其研究了两类传感器的匹配分数中值

第二种融合是所谓的训练样本规则,因为它们需要为了获得理想的阈值分数而让样本经过多次训练,采用公式(4)训练样本
![]()
式中W0,W1,W2为权值向量,显然,中值融合的效果要差于逻辑融合,逻辑融合的过程就是以中值为基础,经过多次迭代,总能找到一组合适的权值向量(W0,W1,W2),使得阈值分数S接近于最佳值。
2实验结果
随机抽取20个人,每个人使用3个手指,分别为大拇指、食指、中指,使用光学和电容传感器,每个手指按压10次,每个人采集到的指纹数为6×10=60,共有指纹20×60=1200。对于每一个验证算法两类集合的匹配分数。第一次匹配称为“真正匹配分数(真正用户之间)G集合,第二次是“假匹配分数”(“假冒用户之问”)I集合。
随机细分以上集为2个大小相同的集合:G=G1UG2,I=I1UI2,G1,G2和I1,I2分别是G和I的分离集合。训练集合Tr={G1,I1}用于计算逻辑融合规则的权重,测试集合Tx={G2,I2}用于评价和比较算法性能。它包含以下几个指标:
训练样本集合的等错误率(EER),也就是当真正用户被系统错误拒绝的百分比(FRR)等于假冒用户被系统错误接受的百分比(FAR)。
表1总结了计算训练样本的EER与测试样本的FAR和FRR的结果。
表1单一传感器和多传感器融合计算结果的指标EER。FAR,FRR
从表1可知,电容传感器性能明显差于光学传感器。其原因主要是电容传感器采集图像时的接触面积远远小于光学传感器。直接导致了其采集的图像提取的细节点数目少,因此,提取的细节点不能彼此正确的匹配。
从等错误率计算的融合结果来看,性能也有很大的提高,逻辑融合减少EER从3.6%到2.9%。测试样本的结果也表明融合提高了系统的鲁棒性,实际上,在逻辑融合(表1第5行)以后,训练样本的性能(表1第2列)和测试样本的性能偏差(表l第3列和第4列)大大减小了。
该实验结果与GianLuca实验结果对比,发现得到的结果指标低于文献[7]的指标,其中原因可能是本文使用的采集器性能比较差,以致获得的指纹图像质量不够理想而导致指标稍弱,另外,可能就是本文使用的算法获得的匹配结果不够理想。
3结论
本文提出了基于光学和电容传感器多传感器指纹验证系统。实验结果表明:验证后的多传感器系统性能优于最好的单一传感器陛能(光学传感器),而且,光学和电容传感器匹配器两者之间的互补性也表明了多传感器融合的可能性,从理论上来说系统本身也获得了很低的验证错误率。特征提取过程被分别应用到每一个采集设备采集到的图片,应用一个简单的融合规则,提高系统的验证性能。因此,融合不同类型的传感器提高系统性能方案简单易行。

指纹识别传感器的技术已经经历了几代演进。目前主流的有光学传感器、半导体传感器及超声波传感器三种。光学指纹传感器是最早规模商用的指纹识别传感器,广泛应用于...
常见的碰撞传感器主要有机械式碰撞传感器、磁力式碰撞传感器、压电式碰撞传感器、应变式碰撞传感器、压阻片式碰撞传感器和水银开关式碰撞传感器。碰撞传感器用于检...
FP指纹+BLE5.1指纹蓝牙二合一模块HLK-FPM133特性概述
海凌科2023年首款新品推出,指纹蓝牙二合一模块——HLK-FPM133,瑞典 FPC 面阵式指纹传感器,支持 BLE 5.1 通讯,存储 100 枚指...
我们都非常熟悉电子投票机,您的投票以电子方式登记,您无需使用选票即可在选举中投票。今天,安全性是一个主要问题,还需要确保某人不能投票两次,因此可以通过引...
三星开发了一种高性能有机光电二极管(OPD,Organic Photo Diode),该二极管将很快实现全屏指纹传感器的商业化。
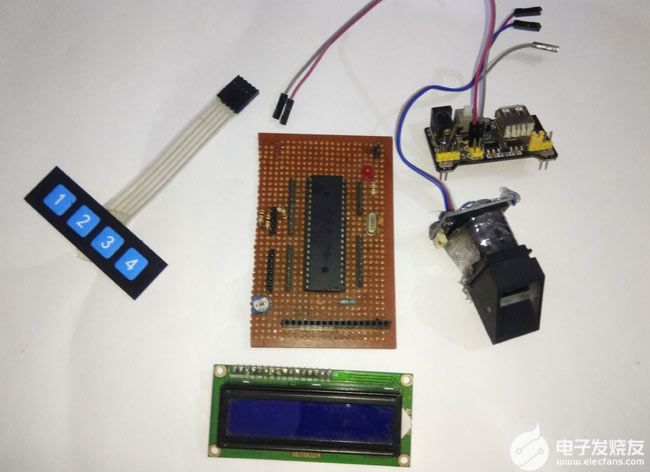
目前,我们在日常生活中随处可见基于指纹的系统,例如办公室考勤,银行员工验证,自动取款机中的现金提取或存款,政府办公室的身份验证等。我们已经将其与Ardu...
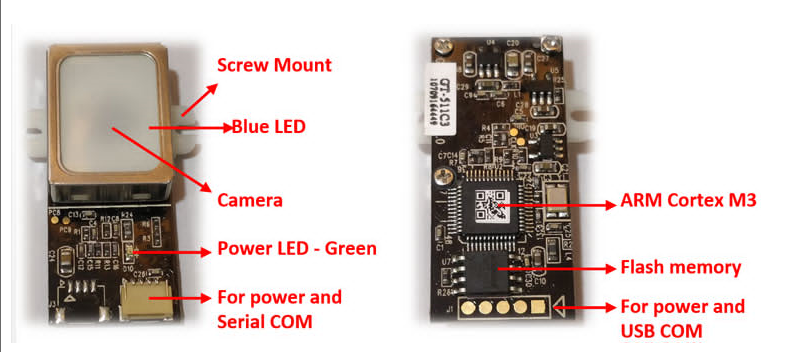
在本教程中,我们将学习如何在Arduino 中使用流行的 GT511C3 指纹传感器 (FPS)。有许多可用的 FPS,我们已经学会了如何使用它们来构建...
电容式指纹识别是将电容感测点阵整合于一块传感器中,当指纹按压传感器表面时,由于人体指纹呈沟壑结构,波峰与波谷产生的电荷导电率不同,通过面阵的电容识别可以...

与光学指纹传感器的创建指纹图像不同,电容式产品采用微电容电路组成的阵列来收集数据。当手指按压到采集面上时,手指的脊和谷在表皮和芯片之间产生不同的微小电容...

STPay-Topaz-Bio: 意法半导体指纹卡荣获CES 2022创新奖,攻克两大难关
意法半导体与 Fingerprint Cards 和 Linxens 两家公司合作开发出了STPay-Topaz-Bio指纹识别平台。根据 Report...
据了解,小米15搭载骁龙8至尊版,第二代3nm工艺、双超大核、PC级架构,是首个采用高通下一代定制高通Oryon CPU的移动平台,采用专门面向移动...

【2024年10月18日, 德国慕尼黑讯】指纹传感能够提供准确、经济的生物识别性能。与使用智能手机或在汽车用户界面上输入密码等其他身份验证方式相比,指纹...
德赢Vwin官网 网报道(文/周凯扬)2024年6月15日,航顺举办了HK32MCU新品发布会,本次大会上,航顺发布了高性能迭代HK32F4系列MCU产品,以及...
八爪鱼推出新款160Plus 指纹传感器,用“芯”化解行业痛点
随着科技的不断进步,智能门锁市场迎来了前所未有的发展机遇。杭州八爪鱼微电子有限公司,作为智能门锁芯片领域的标杆,凭借其深厚的技术积累和创新能力,已经推出...
指纹传感器的定义 指纹传感器的应用 指纹传感器是一种生物识别技术,通过检测和分析人体指纹特征来验证用户身份。它基于指纹独特性和稳定性的基本原理,通过测...
小米15系列手机或全系搭载汇顶单点超声波指纹,年底或现小屏新品
根据内部消息显示,15系列手机将延续小米13及14系列的直曲双尺寸策略,且标准版仍将采用小型直面屏设计;此外,小尺寸版本亦正处于调试汇顶单点声波指纹解决...
指纹传感器漏洞可在戴尔、联想、微软上绕过Windows Hello登录
Windows Hello 是使用 PIN、面部识别或指纹来快速访问 Windows 11 设备的一种更个性化、更安全的方式,从 3 年前开始,微软便称...
如果仍然持有初代iPhone SE的用户需要维修服务,可能需要提前咨询苹果网点或寻找第三方服务。

其他智能手机制造商最初也追随这一趋势,但几年后便停止使用VCSEL,转而使用屏下指纹传感器。苹果仍然是仅有的几家采用VCSEL的参与者之一。与2018年...
据三星显示介绍,这种光感应技术内置于新型OLED面板的每个像素中,因此它可以同时感测来自多个手指的指纹或心率信息。这将使得设备能够提供更准确的生物识别身...
 换一批
换一批
编辑推荐厂商产品技术软件/工具OS/语言教程专题
| 电机控制 | DSP | 氮化镓 | 功率放大器 | ChatGPT | 自动驾驶 | TI | 瑞萨电子 |
| BLDC | PLC | 碳化硅 | 二极管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 无刷电机 | FOC | IGBT | 逆变器 | 文心一言 | 5G | 英飞凌 | 罗姆 |
| 直流电机 | PID | MOSFET | 传感器 | 人工智能 | 物联网 | NXP | 赛灵思 |
| 步进电机 | SPWM | 充电桩 | IPM | 机器视觉 | 无人机 | 三菱电机 | ST |
| 伺服电机 | SVPWM | 光伏发电 | UPS | AR | 智能电网 | 国民技术 | Microchip |
| 开关电源 | 步进电机 | 无线充电 | LabVIEW | EMC | PLC | OLED | 单片机 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 蓝牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太网 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 语音识别 | 万用表 | CPLD | 耦合 | 电路仿真 | 电容滤波 | 保护电路 | 看门狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 阈值电压 | UART | 机器学习 | TensorFlow |
| Arduino | BeagleBone | 树莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 华秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
关注我们的微信

下载发烧友APP

德赢Vwin官网 观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
德赢Vwin官网 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1

