完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
标签 > 时序

这里所说的时序其实就是指时序图,又名序列图、循序图、顺序图,是一种UML交互图。它通过描述对象之间发送消息的时间顺序显示多个对象之间的动态协作。
这里所说的时序其实就是指时序图(Sequence Diagram),又名序列图、循序图、顺序图,是一种UML交互图。它通过描述对象之间发送消息的时间顺序显示多个对象之间的动态协作。它可以表示用例的行为顺序,当执行一个用例行为时,其中的每条消息对应一个类操作或状态机中引起转换的触发事件。组成元素
时序图中包括如下元素:角色,对象,生命线,控制焦点和消息。1、角色(Actor)系统角色,可以是人或者其他系统,子系统。2、对象(Object)对象代表时序图中的对象在交互中所扮演的角色,位于时序图顶部和对象代表类角色。对象一般包含以下三种命名方式:第一种方式包含对象名和类名。第二种方式只显示类名不显示对象名,即为一个匿名对象。第三种方式只显示对象名不显示类名。3、生命线(Lifeline)生命线代表时序图中的对象在一段时期内的存在。时序图中每个对象和底部中心都有一条垂直的虚线,这就是对象的生命线,对象间 的消息存在于两条虚线间。4、控制焦点(Activation)控制焦点代表时序图中的对象执行一项操作的时期,在时序图中每条生命线上的窄的矩形代表活动期。它可以被理解成C语言语义中一对花括号“{}”中的内容。5、消息(Message)消息是定义交互和协作中交换信息的类,用于对实体间的通信内容建模,信息用于在实体间传递信息。允许实体请求其他的服务,类角色通过发送和接受信息进行通信。
这里所说的时序其实就是指时序图(Sequence Diagram),又名序列图、循序图、顺序图,是一种UML交互图。它通过描述对象之间发送消息的时间顺序显示多个对象之间的动态协作。它可以表示用例的行为顺序,当执行一个用例行为时,其中的每条消息对应一个类操作或状态机中引起转换的触发事件。组成元素
时序图中包括如下元素:角色,对象,生命线,控制焦点和消息。1、角色(Actor)系统角色,可以是人或者其他系统,子系统。2、对象(Object)对象代表时序图中的对象在交互中所扮演的角色,位于时序图顶部和对象代表类角色。对象一般包含以下三种命名方式:第一种方式包含对象名和类名。第二种方式只显示类名不显示对象名,即为一个匿名对象。第三种方式只显示对象名不显示类名。3、生命线(Lifeline)生命线代表时序图中的对象在一段时期内的存在。时序图中每个对象和底部中心都有一条垂直的虚线,这就是对象的生命线,对象间 的消息存在于两条虚线间。4、控制焦点(Activation)控制焦点代表时序图中的对象执行一项操作的时期,在时序图中每条生命线上的窄的矩形代表活动期。它可以被理解成C语言语义中一对花括号“{}”中的内容。5、消息(Message)消息是定义交互和协作中交换信息的类,用于对实体间的通信内容建模,信息用于在实体间传递信息。允许实体请求其他的服务,类角色通过发送和接受信息进行通信。
结构
时序图描述对象是如何交互的,并且将重点放在消息序列上。也就是说,描述消息是如何在对象间发送和接收的。时序图有两个坐标轴:纵坐标轴显示时间,横坐标轴显示对象。每一个对象的表示方法是:矩形框中写有对象和 / 或类名,且名字下面有下划线;同时有一条纵向的虚线表示对象在序列中的执行情况 ( 即发送和接收的消息对象的活动 ) , 这条虚线称为对象的生命线。对象间的通信用对象的生命线之间的水平的消息线来表示,消息线的箭头说明消息的类型,如同步,异步或简单 。 浏览时序图的方法是,从上到下查看对象间交换的消息,分析那些随着时间的流逝而发生的消息交换。时序图中的消息可以是信号、操作调用或类似于 C++ 中的 RPC ( Remote Procedure Call,远程过程调用)或 Java 中的 RMI ( Remote Method Invocation , 远程方法调用)。当对象接收到一个消息时,该对象中的一项活动就会启动,我们把这一过程称做激活 ( Activation )。 激活会显示控制焦点,表明对象在某一个时间点开始执行。一个被激活的对象或者是执行它自身的代码,或者是等待另一个对象的返回(该被激活的对象已经向另一个对象发送了消息)。在图形上,激活被绘制为对象生命线上的一个瘦高矩形。消息可以用消息名及参数来标识。消息还可带有条件表达式,表示分支或决定是否发送消息。如果用于表示分支,则每个分支是相互排斥的,即在某一时刻仅可发送分支中的一个消息。消息也可以有顺序号,但是在时序图中,消息的顺序号很少使用,因为时序图已经将消息的顺序显式地表示出来了。一个对象可以通过发送消息来创建另一个对象,当一个对象被删除或自我删除时,该对象用 “X”标识。
创建步骤
1、确定交互过程的上下文;2、识别参与过程的交互对象;3、为每个对象设置生命线;4、从初始消息开始,依次画出随后消息;5、考虑消息的嵌套,标示消息发生时的时间点,则采用FOC(focus of control);6、说明时间约束的地点。
如何看懂时序图?
操作时序永远使用是任何一片IC芯片的最主要的内容。一个芯片的所有使用细节都会在它的官方器件手册上包含。所以使用一个器件事情,要充分做好的第一件事就是要把它的器件手册上有用的内容提取,掌握。介于中国目前的芯片设计能力有限,所以大部分的器件都是外国几个IC巨头比如TI、AT、MAXIM这些公司生产的,器件资料自然也是英文的多,所以,英文的基础要在阅读这些数据手册时得到提高哦。即便有中文翻译版本,还是建议看英文原版,看不懂时不妨再参考中文版,这样比较利于提高。
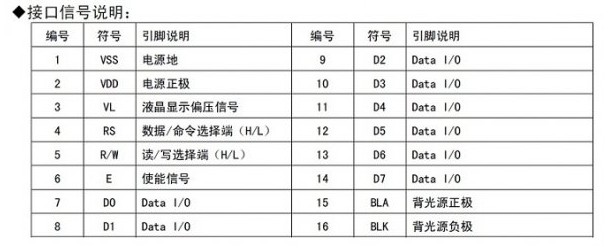
我们首先来看1602的引脚定义,1602的引脚是很整齐的SIP单列直插封装,所以器件手册只给出了引脚的功能数据表:
我们只需要关注以下几个管脚:
3脚:VL,液晶显示偏压信号,用于调整LCD1602的显示对比度,一般会外接电位器用以调整偏压信号,注意此脚电压为0时可以得到最强的对比度。
4脚:RS,数据/命令选择端,当此脚为高电平时,可以对1602进行数据字节的传输操作,而此脚为低电平时,则是进行命令字节的传输操作。命令字节,即是用来对LCD1602的一些工作方式作设置的字节;数据字节,即使用以在1602上显示的字节。值得一提的是,LCD1602的数据是8位的。
5脚:R/W,读写选择端。当此脚为高电平可对LCD1602进行读数据操作,反之进行写数据操作。笔者认为,此脚其实用处不大,直接接地永久置为低电平也不会影响其正常工作。但是尚未经过复杂系统验证,保留此意见。
6脚:E,使能信号,其实是LCD1602的数据控制时钟信号,利用该信号的上升沿实现对LCD1602的数据传输。
7~14脚:8位并行数据口,使得对LCD1602的数据读写大为方便。
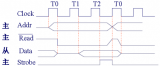
现在来看LCD1602的操作时序:
![]()
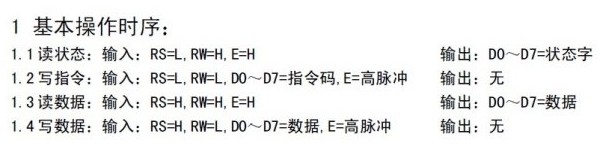
在此,我们可以先不读出它的数据的状态或者数据本身。所以只需要看两个写时序:
① 当我们要写指令字,设置LCD1602的工作方式时:需要把RS置为低电平,RW置为低电平,然后将数据送到数据口D0~D7,最后E引脚一个高脉冲将数据写入。
② 当我们要写入数据字,在1602上实现显示时:需要把RS置为高电平,RW置为低电平,然后将数据送到数据口D0~D7,最后E引脚一个高脉冲将数据写入。
发现了么,写指令和写数据,差别仅仅在于RS的电平不一样而已。以下是LCD1602的时序图:
大家要慢慢学会看时序图,要知道操作一个器件的精华便蕴藏在其中,看懂看准了时序,你操控这个芯片就是非常容易的事了。1602的时序是我见过的一个最简单的时序:
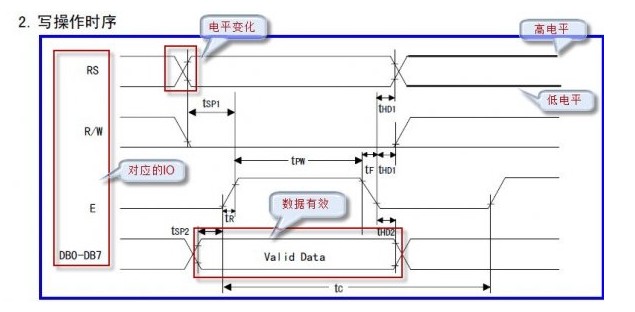
1、注意时间轴,如果没有标明(其实大部分也都是不标明的),那么从左往右的方向为时间正向轴,即时间在增长。
2、上图框出并注明了看懂此图的一些常识:
(1)。时序图最左边一般是某一根引脚的标识,表示此行图线体现该引脚的变化,上图分别标明了RS、R/W、E、DB0~DB7四类引脚的时序变化。
(2)。有线交叉状的部分,表示电平在变化,如上所标注。
(3)。应该比较容易理解,如上图右上角所示,两条平行线分别对应高低电平,也正好吻合(2)中电平变化的说法。
(4)。上图下,密封的菱形部分,注意要密封,表示数据有效,Valid Data这个词也显示了这点。
3、需要十分严重注意的是,时序图里各个引脚的电平变化,基于的时间轴是一致的。一定要严格按照时间轴的增长方向来精确地观察时序图。要让器件严格的遵守时序图的变化。在类似于18B20这样的单总线器件对此要求尤为严格。
4、以上几点,并不是LCD1602的时序图所特有的,绝大部分的时序图都遵循着这样的一般规则,所以大家要慢慢的习惯于这样的规则。
也许你还注意到了上面有许多关于时间的标注,这也是个十分重要的信息,这些时间的标注表明了某些状态所要维持的最短或最长时间。因为器件的工作速度也是有限的,一般都跟不上主控芯片的速度,所以它们直接之间要有时序配合。话说现在各种处理器的主频也是疯狂增长,日后搞不好出现个双核单片机也不一定就是梦话。下面是时序参数表:
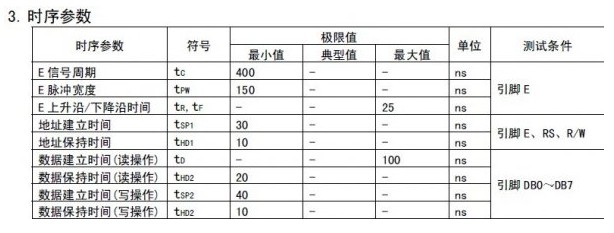
大家要懂得估计主控芯片的指令时间,可以在官方数据手册上查到MCU的一些级别参数。比如我们现在用AVR M16做为主控芯片,外部12MHz晶振,指令周期就是一个时钟周期为(2/12MHz)s,所以至少确定了它执行一条指令的时间是us级别的。我们看到,以上给的时间参数全部是ns级别的,所以即便我们在程序里不加延时程序,也应该可以很好的配合LCD1602的时序要求了。怎么看这个表呢?很简单,我们在时序图里可以找到TR1,对应时序参数表,可以查到这个是E上升沿/下降沿时间,最大值为25ns,表示E引脚上的电平变化,必须在最大为25ns之内的时间完成。大家看是不是这个意思?
现在我来解读我对这个时序图的理解:
当要写命令字节的时候,时间由左往右,RS变为低电平,R/W变为低电平,注意看是RS的状态先变化完成。然后这时,DB0~DB7上数据进入有效阶段,接着E引脚有一个整脉冲的跳变,接着要维持时间最小值为tpw=400ns的E脉冲宽度。然后E引脚负跳变,RS电平变化,R/W电平变化。这样便是一个完整的LCD1602写命令的时序。

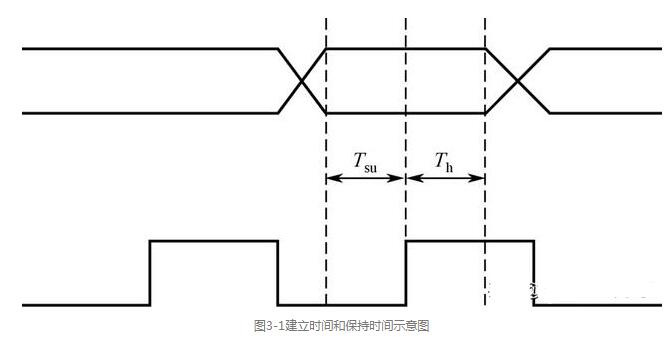
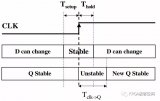
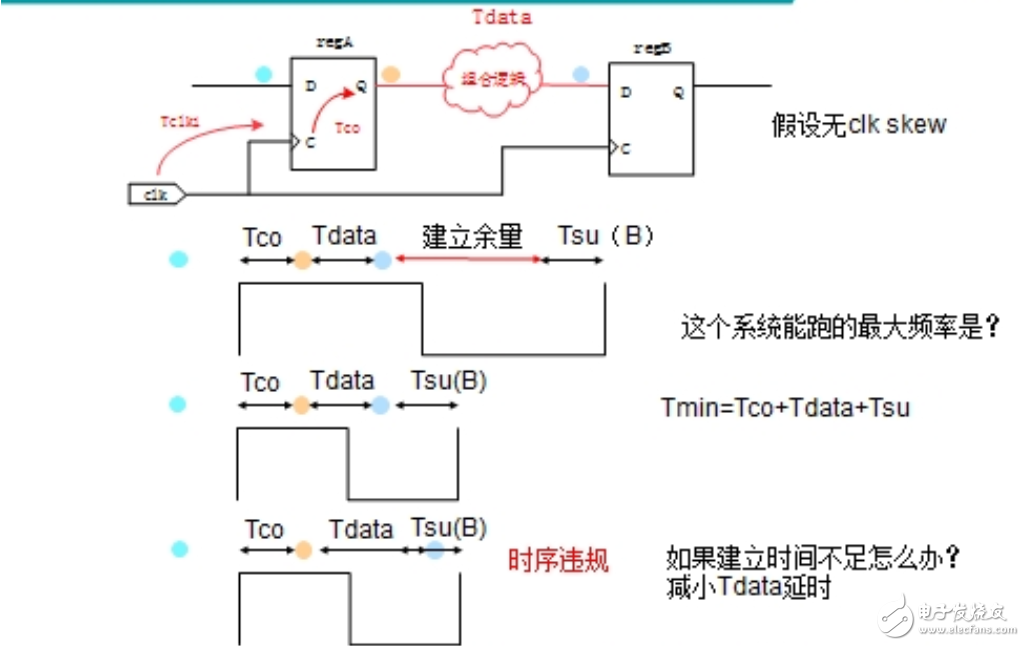
建立时间(Tsu)是指在时钟上升沿到来之前数据必须保持稳定的时间,保持时间(Th)是指在时钟上升沿到来以后数据必须保持稳定的时间。一个数据需要在时钟的上...
电源时序器能够按照由前级设备到后级设备逐个顺序启动电源,关闭供电电源时则由后级到前级的顺序关闭各类用电设备,这样就能有效的统一管理和控制各类用电设备,避...
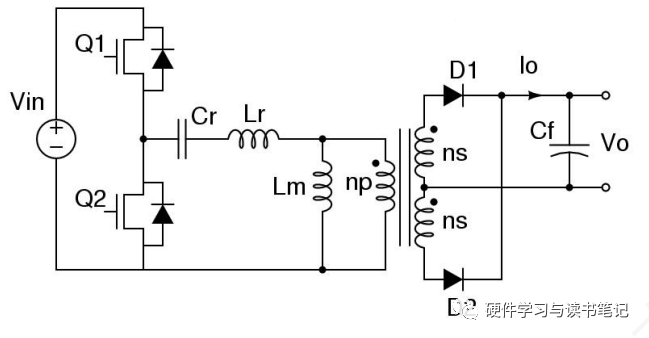
如图1,LLC有两个谐振频率。一个由谐振分量 Lr 和 Cr 确定。另一个由 Lm、Cr 和负载条件确定。随着负载越来越重,谐振频率将向更高的频率移动。...
分析和预测时序数据的主要方法,如何使用Python处理时序数据
让我们从一个朴素的假设开始——“明天会和今天一样”,但是我们并不使用类似y^t=y(t-1)这样的模型(这其实是一个适用于任意时序预测问题的很好的基线,...
大多数FPGA芯片是基于 SRAM 的结构的, 而 SRAM 单元中的数据掉电就会丢失,因此系统上电后,必须要由配置电路将正确的配置数据加载到 SRAM...
在简单电路中,当频率较低时,数字信号的边沿时间可以忽略时,无需考虑时序约束。但在复杂电路中,为了减少系统中各部分延时,使系统协同工作,提高运行频率,需要...
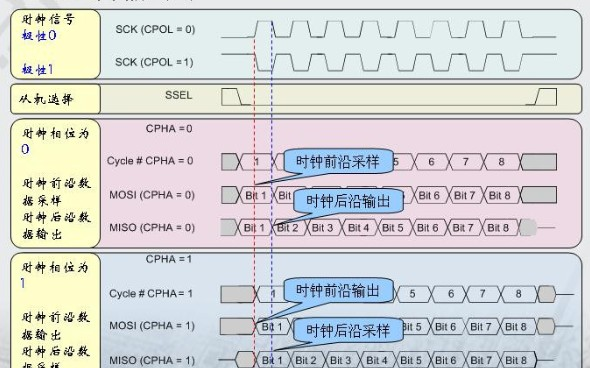
SPI,是英语Serial Peripheral Interface的缩写,顾名思义就是串行外围设备接口。SPI,是一种高速的,全双工,同步的通信总线,...
做嵌入式系统开发,经常要接触硬件。做嵌入式开发对数字电路和模拟电路要有一定的了解。这样才能深入的研究下去。下面我们简单的介绍嵌入式开发中的一些硬件相关的知识。
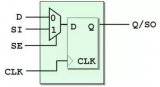
SE是scan enable信号,它控制着scan cell的工作模式。从图中可以看出,SE,SI,D端通过一个Mux实现工作模式的切换。当SE输入为0...
最近是跟内存耗上了,其一是手里没有其它硬件可测,更重要的是想趁着这段时间,把内存与性能之间的影响都慢慢测一下。今天测的就是时序与内存性能之间的关系了。时...
什么是竞争和冒险? (1)竞争 在一个组合电路当中,当某一个变量经过两条以上的路径到达输出端的时候,由于每条路径上的延迟时间的不同,到达终点的时间就会有...

今天要介绍的时序分析概念是fanout。中文名是扇出。指的是指定pin或者port的输出端口数。 合理的选择fanout的数目对设计来说是非常重要的,f...

何为信号完整性的分析信号完整性包含:波形完整性(Waveformintegrity)时序完整性(Timingintegrity)电源完整性(Poweri...

如果你参加过IC校招面试,自然会被问到“setup/hold的概念,以及setup/hold违例怎么办?”
FPGA在与外部器件打交道时,端口如果为输入则与input delay约束相关,如果最为输出则output delay,这两种约束的值究竟是什么涵义,在...
时钟的时序特性主要分为抖动(Jitter)、偏移(Skew)、占空比失真(Duty Cycle DistorTIon)3点。对于低速设计,基本不用考虑这...
 换一批
换一批
编辑推荐厂商产品技术软件/工具OS/语言教程专题
| 电机控制 | DSP | 氮化镓 | 功率放大器 | ChatGPT | 自动驾驶 | TI | 瑞萨电子 |
| BLDC | PLC | 碳化硅 | 二极管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 无刷电机 | FOC | IGBT | 逆变器 | 文心一言 | 5G | 英飞凌 | 罗姆 |
| 直流电机 | PID | MOSFET | 传感器 | 人工智能 | 物联网 | NXP | 赛灵思 |
| 步进电机 | SPWM | 充电桩 | IPM | 机器视觉 | 无人机 | 三菱电机 | ST |
| 伺服电机 | SVPWM | 光伏发电 | UPS | AR | 智能电网 | 国民技术 | Microchip |
| 开关电源 | 步进电机 | 无线充电 | LabVIEW | EMC | PLC | OLED | 单片机 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 蓝牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太网 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 语音识别 | 万用表 | CPLD | 耦合 | 电路仿真 | 电容滤波 | 保护电路 | 看门狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 阈值电压 | UART | 机器学习 | TensorFlow |
| Arduino | BeagleBone | 树莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 华秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
关注我们的微信

下载发烧友APP

德赢Vwin官网 观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
德赢Vwin官网 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1