完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
标签 > 相位

相位(phase)是对于一个波,特定的时刻在它循环中的位置:一种它是否在波峰、波谷或它们之间的某点的标度。相位描述信号波形变化的度量,通常以度 (角度)作为单位,也称作相角。
相位(phase)是对于一个波,特定的时刻在它循环中的位置:一种它是否在波峰、波谷或它们之间的某点的标度。相位描述信号波形变化的度量,通常以度 (角度)作为单位,也称作相角。 当信号波形以周期的方式变化,波形循环一周即为360° 。相位常应用在科学领域,如数学、物理学等。例如:在函数y=Acos(ωx+φ)中,ωx+φ称为相位。在astrolog32中点击ALT+SHIFT+A可以显示相位设定菜单。在交流电中,相位是反映交流电任何时刻的状态的物理量。交流电的大小和方向是随时间变化的。比如正弦交流电流,它的公式是i=Isin2πft。i是交流电流的瞬时值,I是交流电流的最大值,f是交流电的频率,t是时间。随着时间的推移,交流电流可以从零变到最大值,从最大值变到零,又从零变到负的最大值,从负的最大值变到零。在三角函数中2πft相当于弧度,它反映了交流电任何时刻所处的状态,是在增大还是在减小,是正的还是负的等等。因此把2πft叫做相位,或者叫做相。
相位(phase)是对于一个波,特定的时刻在它循环中的位置:一种它是否在波峰、波谷或它们之间的某点的标度。相位描述信号波形变化的度量,通常以度 (角度)作为单位,也称作相角。 当信号波形以周期的方式变化,波形循环一周即为360° 。相位常应用在科学领域,如数学、物理学等。例如:在函数y=Acos(ωx+φ)中,ωx+φ称为相位。在astrolog32中点击ALT+SHIFT+A可以显示相位设定菜单。在交流电中,相位是反映交流电任何时刻的状态的物理量。交流电的大小和方向是随时间变化的。比如正弦交流电流,它的公式是i=Isin2πft。i是交流电流的瞬时值,I是交流电流的最大值,f是交流电的频率,t是时间。随着时间的推移,交流电流可以从零变到最大值,从最大值变到零,又从零变到负的最大值,从负的最大值变到零。在三角函数中2πft相当于弧度,它反映了交流电任何时刻所处的状态,是在增大还是在减小,是正的还是负的等等。因此把2πft叫做相位,或者叫做相。
相位调整
(phase adjustment)。指在有些超低音音箱上加装的一个控制机构。用于对超低音音箱所重放出的声音稍许加以延迟,从而让超低音音箱的输出能够和前置主音箱同相位,即具有相同的时间关系。
相位噪声
是频率域的概念。相位噪声是对信号时序变化的另一种测量方式,其结果在频率域内显示。如果没有相位噪声,那么振荡器的整个功率都应集中在频率f=fo处。但相位噪声的出现将振荡器的一部分功率扩展到相邻的频率中去,产生了边带(sideband)。从图2中可以看出,在离中心频率一定合理距离的偏移频率处,边带功率滚降到1/fm,fm是该频率偏离中心频率的差值。相位噪声通常定义为在某一给定偏移频率处的dBc/Hz值,其中,dBc是以dB为单位的该频率处功率与总功率的比值。一个振荡器在某一偏移频率处的相位噪声定义为在该频率处1Hz带宽内的信号功率与信号的总功率比值。
相位差
两个频率相同的交流电相位的差叫做相位差,或者叫做相差。这两个频率相同的交流电,可以是两个交流电流,可以是两个交流电压,可以是两个交流电动势,也可以是这三种量中的任何两个。例如研究加在电路上的交流电压和通过这个电路的交流电流的相位差。如果电路是纯电阻,那么交流电压和交流电流的相位差等于零。也就是说交流电压等于零的时候,交流电流也等于零,交流电压变到最大值的时候,交流电流也变到最大值。这种情况叫做同相位,或者叫做同相。如果电路含有电感和电容,交流电压和交流电流的相位差一般是不等于零的,也就是说一般是不同相的,或者电压超前于电流,或者电流超前于电压。加在晶体管放大器基极上的交流电压和从集电极输出的交流电压,这两者的相位差正好等于180°。这种情况叫做反相位,或者叫做反相。简谐运动中的相位差:如果两个简谐运动的频率相等,其初相位分别是φ1,φ2。当φ2》φ1时,他们的相位差是△φ=(ωt+φ2)-(ωt+φ1)=φ2-φ1此时我们常说2的相位比1超前△φ。
正弦交流电的相位、初相(角)和相位差
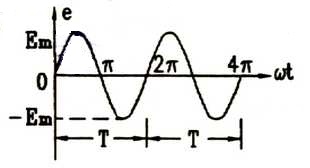
前面两节课中所讲到的如上图所示的波形图是一种特定波形:即t=0时,e=0。
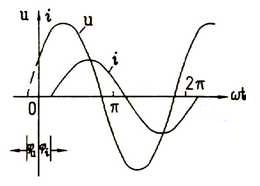
而实际中,t=0时,e不一定为零,如右图所示:因此,一般正弦交流量的瞬时表达式应为:
e=Emsin(ωt+Φe)
u=Umsin(ωt+Φu)
i=Imsin(ωt+Φi)
相位、初相和相位差
上述公式中(ωt+Φ)称为正弦量的相位,它是表示正弦量变化进程的物理量。例如:当相位ωt+Φ=90°,e=Em,当(ωt+Φ)=180°时,e=0,如此等等。可见,相位随时间不断变化,电动势e也就不断变化。由于相位是用电角度表示的,所以也称相位角。
公式中Φ称为正弦量的初相角。它是t=0时的相位角,简称初相。
在交流电路中经常要进行同频率正弦量之间相位的比较(比如电压和电流之间)。同频率正弦量的相位之差称为相位差,用△Φ表示。在上右图中,电压u与电流i的相位差为:
△Φ=(ωt+Φu)-(ωt+Φi)=Φu-Φi
即为两正弦量初相之差。虽然相位是时间的函数,但相位差则是不随时间而变化的常数。
如果两同频率正弦量的初相相等,相位差为零,我们称它们同相,即它们同时达到正或负的最大值,同事到达零值;如果它们的相位差等于±π(180°),则称它们是反相,即它们在任意瞬时方向总是相反的;如果它们的相位不同,相位差不等于零,则称在本格周期内谁先达到最大值的正弦量比后到达同方向最大值的正弦量是超前的,或称后者滞后于前者,也就是初相大的超前初相小的。在上右图中u超前于i,即u比i先到达最大值。
学习进阶
应当指出:在比较两个正弦量的相位时,其超前或滞后的角度,习惯上不应大于180°。而对于不同频率的正弦量,就不能用相位差来比较,因为这时相位差将随时间而变化。
例题:试计算下列u与i在t=0时的数值u0及i0;并比较其相位关系,已知:
u=311sin(ωt+30°)伏;
i=5sin(ωt-30°)安;
解:当t=0时:
u0=311sin(0+30°)=311sin30°=155.5伏;
i0=5sin(0-30°)=5sin(-30°)=-2.5安;
u与i的相位差:
△Φ=(ωt+30°)-(ωt-30°)=30°-(-30°)=60°
即,电压超前于电流60°,或电流滞后于电压60°。
相位变化对于真实信号的影响是什么
作者:一凡
链接:https://www.zhihu.com/question/26450103/answer/32882188
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
一个信号经过傅里叶分解后变成Phase+Magnitude两部分
形象的说,Phase代表信号的形状,Magnitude代表对应形状的大小比例
一维信号的确不太直观,我们来看二维的信号(图像)吧,上图: (图:又上我?!)

图中 F‘(Magnitude,Phase) 代表傅里叶逆变换
二维图像处理中,原图经傅里叶分解成两部分:Magnitude & Phase(相位)。 图a是原图(Spatial Domain),图b是相位图,很乱是吧,但是用相位图(不加Magnitude)还原出Spatial Domain的信号(图像),即图c,依然可以看到原图的轮廓,这代表相位是图形的形状分量,而Magnitude(中文是啥?)代表形状分量(Phase)每一部分的比重

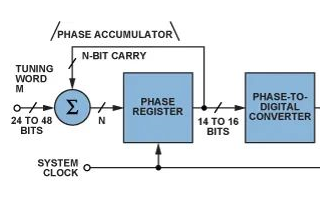
数字锁相环(DPLL)固有的相位抖动主要来源于多个方面,这些抖动因素共同影响着锁相环的同步精度和稳定性。以下是数字锁相环相位抖动产生的主要原因:

发射端涉及到抖动的来源有:Thermal Noise(随机抖动), Duty Cycle Distortion(占空比失真), Power Supply...
相位,指的是某个波形,在特定时间的位置,比如正弦波,当相位达到最高点的时候,我们称之为波峰。假设有一个正弦波电压通过某个电阻,我们把电流记录下来与电压对...
三相系统中的不平衡分量,且相互之间相位相同。求零序分量:把三个向量相加求和。即A相不动,B相的原点平移到A相的顶端(箭头处),注意B相只是平移,不能转动。
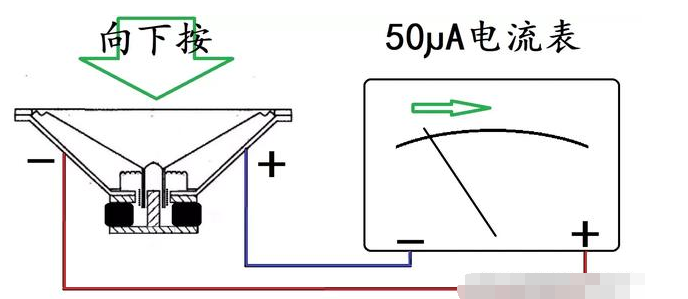
第一种是用指针式万用表来测。首先把万用表拔到直流50μA档,然后用表笔触到扬声器的两个引脚,同时用手按动喇叭的纸盆。向下按时表针如正向摆动,此时正表笔所...
2021-06-15 标签:相位 2.3万 0
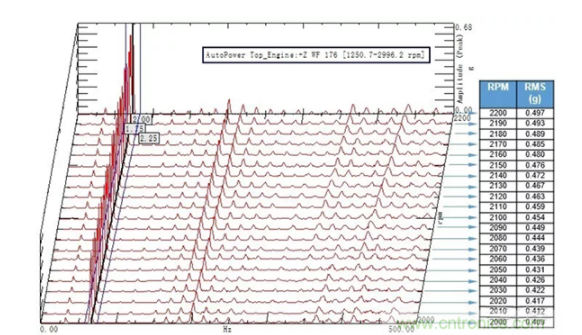
当需要比较各阶次的相对大小、对总量级OA的贡献,以及评价阶次的线性度时都需要对阶次进行提取。而常规提取出来的阶次是不带相位信息的,在这里我们讲一讲带相位...
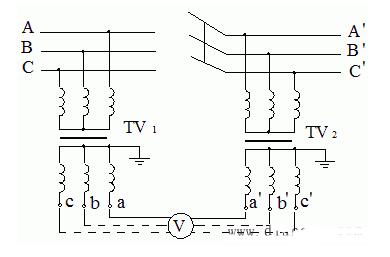
测量相位,是在有电磁连接的同一系统并列或环接、主变压器并列、以及新线路投入时不可缺少的试验项目之一。测量相位的目的在于判断相位和相序,防止由于彼此不一致...
已更新表 5-2,在确认没有时钟遗漏中添加了检查时序报告的信息,已更新降低网络延迟, 已更新表 5-4,已更新报告设计分析拥塞报告,在报告设计分析复杂性...
从早期的15.x版本到如今依然运用广泛的16.5版本,不管是差分对内还是组间,绕等长的命令只有一个Delay Tune可以用,不过就这一个命令从速度上来...
AD9164 16位12GSPS RF DAC支持直至S频段的直接RF。这款高性能DAC配合表贴塑料封装的HMC1114 10W SiC衬底GaN功率放...
有关电流互感器电流相位问题的产生原因,同一个表在直接时接入的是线电流,用互感器时接入的是与原电流有相位差的电流的问题。
本文将简要介绍该技术,说明其优势和不足,考察一些应用示例,同时介绍一些有助于该技术推广的新产品。
相位偏移调制,又称移相键控(PSK,Phase Shift Keying)是一种利用相位差异的信号来传送资料的调制方式。该传送信号必须为正交信号,其基底...
相位传感器是感应气门位置的信息然后提供给ECU的传感器。相位传感器起检测相位作用,如果相位不准确会报警,在仪表上发动机故障灯亮。
音响系统中的相位是很抽象的,涉及到很多相关的问题,在这里我们主要讨论一下工程常遇到的一些较容易发生的相位问题。 在物理学中,相位的概念是反映交流信号任何...
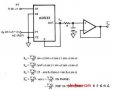
利用相敏光探测器电路可以测量正弦信号。该电路也可以达到180°输出相位与适当的极性,这取决于参数和少于1%的误差。
 换一批
换一批
编辑推荐厂商产品技术软件/工具OS/语言教程专题
| 电机控制 | DSP | 氮化镓 | 功率放大器 | ChatGPT | 自动驾驶 | TI | 瑞萨电子 |
| BLDC | PLC | 碳化硅 | 二极管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 无刷电机 | FOC | IGBT | 逆变器 | 文心一言 | 5G | 英飞凌 | 罗姆 |
| 直流电机 | PID | MOSFET | 传感器 | 人工智能 | 物联网 | NXP | 赛灵思 |
| 步进电机 | SPWM | 充电桩 | IPM | 机器视觉 | 无人机 | 三菱电机 | ST |
| 伺服电机 | SVPWM | 光伏发电 | UPS | AR | 智能电网 | 国民技术 | Microchip |
| 开关电源 | 步进电机 | 无线充电 | LabVIEW | EMC | PLC | OLED | 单片机 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 蓝牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太网 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 语音识别 | 万用表 | CPLD | 耦合 | 电路仿真 | 电容滤波 | 保护电路 | 看门狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 阈值电压 | UART | 机器学习 | TensorFlow |
| Arduino | BeagleBone | 树莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 华秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
关注我们的微信

下载发烧友APP

德赢Vwin官网 观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
德赢Vwin官网 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1


