 德赢Vwin官网
App
德赢Vwin官网
App


1 引言
随着现代控制技术的不断发展,照明控制的智能化要求也越来越高。采用智能照明控制系统不仅能为照明提供多种艺术效果,更能带来节约能源和降低运行费用的好处。
在图书馆、大型商场、室内运动场、长廊等大型照明场合,很多时候其区域可划分为有人区域和无人区域,如果所有区域的照明亮度都相同,则在无人区域的照明根本没有作用,为无效照明。如果智能照明控制系统能对人员位置进行检测,动态地确定出有人区域和无人区域,则可以对有人区域实行正常的较高亮度照明,而对无人区域则降低照度或者关闭灯具。随着人体的移动,系统动态地调整有效照明区域,以达到减少无效照明,在保证良好照明效果的同时节约能源的目的。
人体位置的正确判断是实现智能照明的首要前提,目前有人提出了利用红外与激光探测、射频卡结合身份识别、地板压力传感器等技术手段来确定人体位置的方法。但是这些方法在照明区域较大的场合应用时,存在无合适的传感器安装位置、布线复杂等问题,因此实施起来有一定困难,可靠性也难以进一步提高。实际上目前上述大型照明场合中安装视频监控探头非常普及,如果能充分利用这些视频监控图像,结合数字图像技术,从视频监控图像中提取人体图像,判断人体位置,则可以实现真正的智能化照明。本文采用数字视频图像目标定位与跟踪技术和PLC-Bus 技术构建智能照明控制系统,直接从视频图像中确定人体位置,而且灯具开闭控制信号直接通过电力线传输,不需要另外布线。因此能有效地克服传感器安装及布线方面的诸多困难问题,达到照度的自动调节、灯具的自动开关以及局部区域照明的良好控制效果,并且其可靠性也很高。
2 智能照明控制系统组成
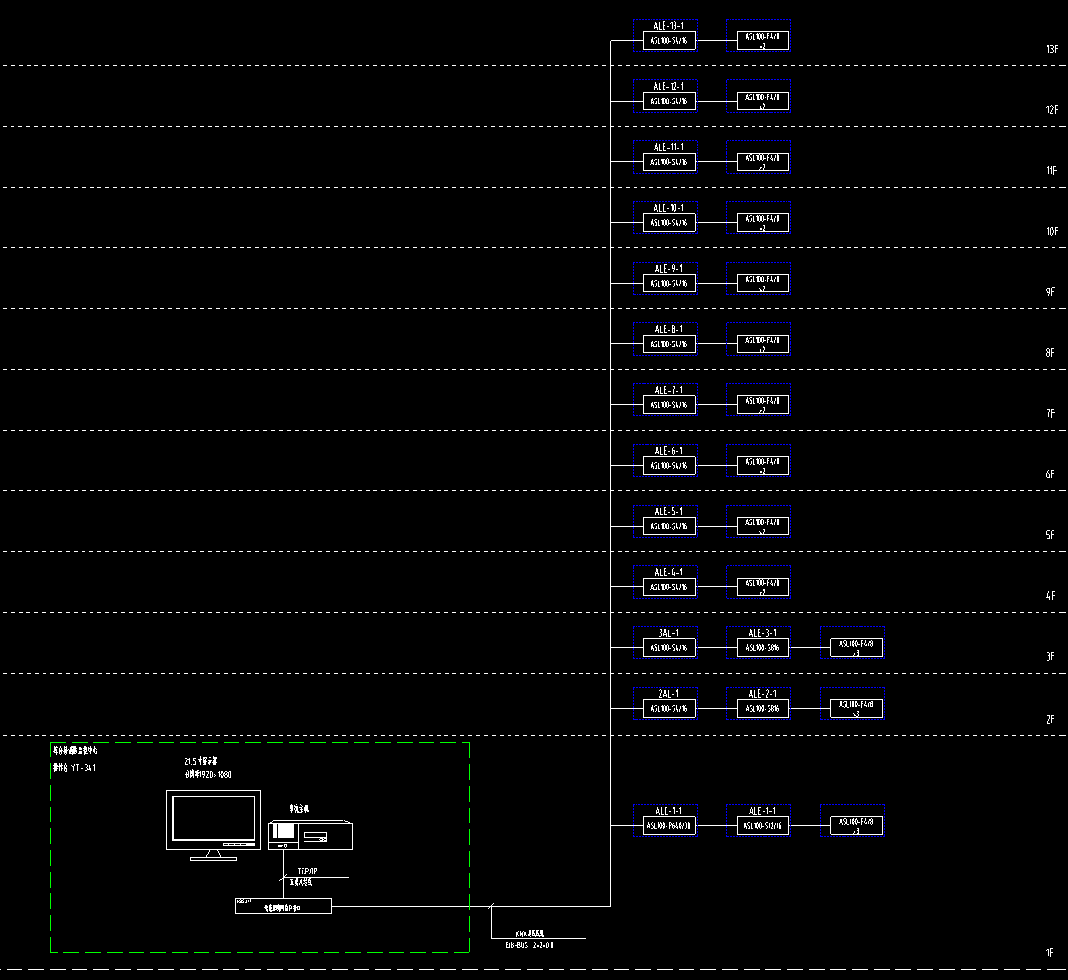
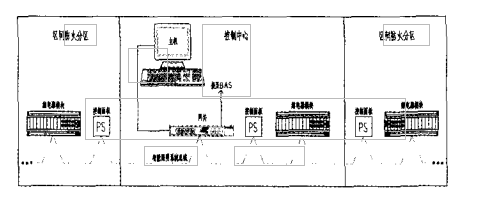
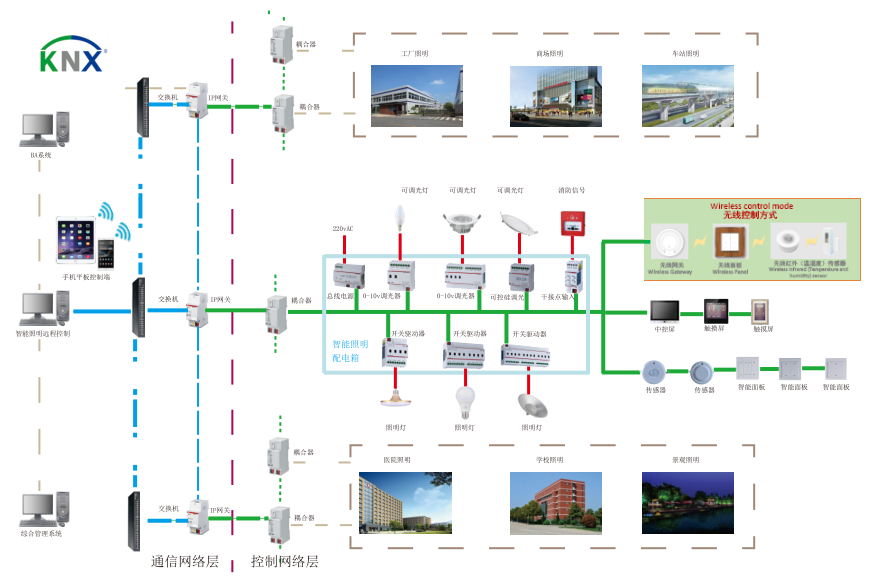
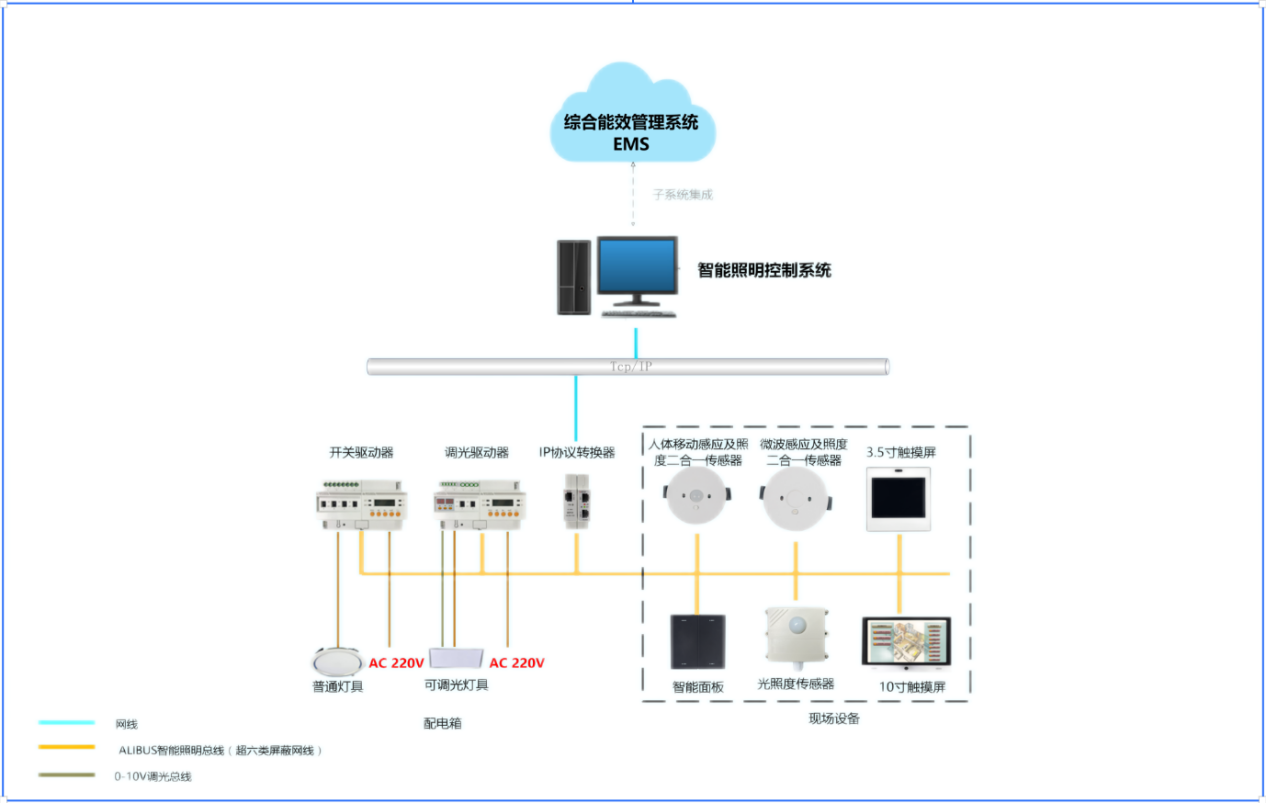
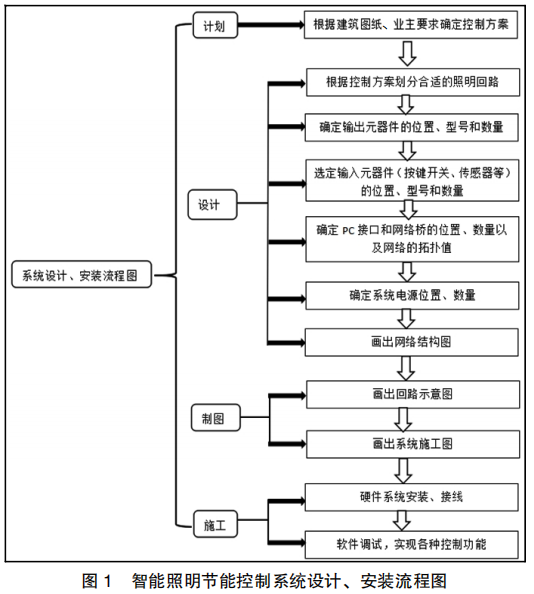
整个系统的组成如图1 所示,从功能上来划分,由三部分构成: 图像采集模块、图像处理模块和照明控制模块。
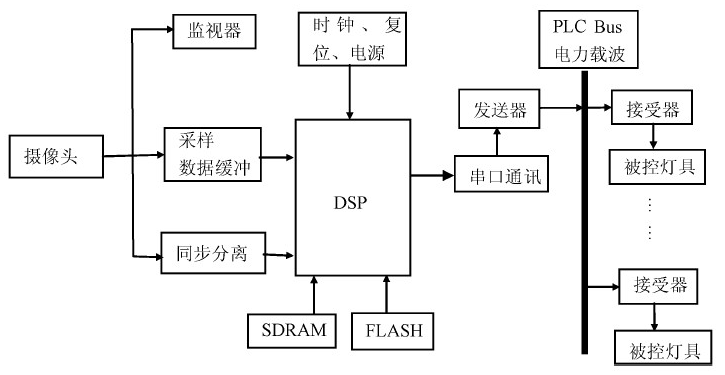
图1 智能照明控制系统的组成
2.1 图像采集模块
图像采集模块主要由摄像头和光学玻璃镜头组成。其中,摄像头采用韩国现代HV7131R, 它是目前主流产品中效果较好的一种。HV7131R 采用0.3??m的CMOS 工艺,有效像素为30 万,功耗低于90mW, 具有曝光控制、增益控制和白平衡处理等功能,最大帧率30fps@VGA.通过标准的I2C 接口设置HV7131R的内部寄存器,可以调节图像的曝光时间、分辨率、帧率、RGB 增益、镜像等,输出10 位的RGB 原始数据。
光学玻璃镜头采用远摄镜头,视角为20°,焦距可达几米至几十米。摄像头的架设应该尽量保证能够观测到整个监视区域,因此,在摄像头的安装位置和角度调节过程中,一般使监视区域设置在从图像底端开始。并且为了避免在提取人体图像时发生严重的粘连现象,摄像头要有尽量大的俯视角度。
2.2 图像处理模块
该模块由DSP 和数据缓存器组成。DSP 主要采用TI 公司的TMS320LF2407.DSP 主要完成的功能有: 加电自主、完成初始化,通过I2C 接口设置摄像头的寄存器,对由图像采集模块获得的照明区监控图像进行预处理、完成对图像中的人体边缘提取、人体位置判断计算以及作出照明控制决策等功能。
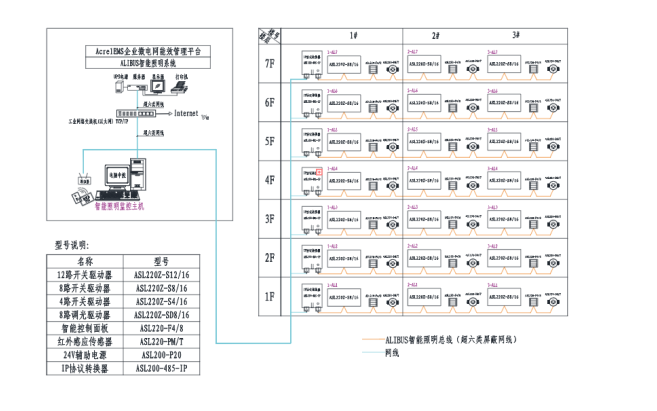
2.3 照明控制模块与PLC Bus 技术
照明控制模块采用分布式控制方式,实现整个监视区域照明灯具的分散控制和集中管理。上位DSP根据图像分析结果作出照明设备控制决策,下位照明控制器接受上位机的通讯指令,控制相应灯具的开关,并具备调光功能。上位DSP 发出的控制指令通过PLC Bus 传给下位照明控制器执行。
PLC Bus 技术是近年来由荷兰ATS 电力线通信有限公司( ATS., CO) 研发出来的一种新的电力载波通讯技术。采用该技术的最大优点是控制信号通过电力线传送,因此不需要额外布置控制线,节省大量线材消耗,控制系统安装方便,易于维护。
PLC Bus 系统主要由三部分组成,即发射器、接收器和系统配套设备。发射器的主要作用是通过电力线发射PLC Bus 控制信号给接收器,通过对接收器的控制,从而达到间接控制灯及电器设备的目的。接收器的主要作用是接收来自电力线的PLC Bus 控制信号,并执行相关控制命令,从而达到灯及电器控制的目的。系统配套设备包括信号转换器、三相耦合器、吸波器等,主要是为了配合发射器及接收器设备辅助实现控制目的。
PLC Bus 采用Pulse Posit ion Modulation( PPM) 脉冲相位调制法,利用电力线的正弦波作为同步信号,通过在四个固定的时序中发送瞬间电脉冲来传递信号。
在50Hz 的电力线上,1 秒钟可以传输200 比特的数据,这样的通讯速率是不能够传输类似计算机的宽带数据,但对传送动作或者指令性的通讯已经足够了。
由于PLC Bus 的PPM 通讯方式的特殊性,接收器可以很轻松简单地还原出PLC Bus 的编码。在PLC Bus里,接收数据用的地址码有NID( Network ID) 和DID( Destinat ion ID) 两种,NID 和DID 分别有8 比特,两者合起来最多可以组成216个不同的地址,控制216个不同的设备。
PLC Bus 的主要特点:
(1) 无需布线,即插即用。
PLC Bus 技术主要通过电力线来传输控制信号,所以无需要重新布线,适用于所有已建成或正在安装的照明场所的智能控制工程。
(2) 超级速度,即控即现。
PLC Bus 的信号传输速度是每秒钟可完成10 个完整指令,平均每条指令从发射到执行在0??1 秒钟之内完成,几乎是即控即现。
(3) 双向通信,状态反馈。
在PLC Bus 产品的硬件、软件和协议中,允许双向通信,能让被控制灯具真实地反馈开关状态信号,以便确定控制命令是否真正被正确执行。而成本只比X-10 单一的接收组件或发射组件高出40% 左右,性价比高。
(4) 兼容性好,应用更广。
PLC Bus 技术设备可以与X-10、CE Bus 和LonWorks 设备兼容,完全不会产生任何信号冲突。
对灯具的控制可分调光与不调光两种,调光可通过采用OSRAM 的可调光电子镇流器对荧光灯进行调光,控制器输出0~ 10V 直流信号作为电子镇流器的控制信号,来实现荧光灯1% ~ 100% 的光通量调节范围。对白炽灯的调光可采用移相触发器和随机型固态继电器来实现。在随机型固态继电器控制端施加一个控制信号,交流负载便能立即导通。当这个控制信号为与交流电网同步的可移相的脉冲信号时,负载端可实现180°范围内的电压平稳调节。移相触发器根据控制电压的大小,输出端产生与电网电压同步的双倍电网频率的180°范围内移相的宽脉冲,用以驱动随机型固态继电器,达到移相调压的目的。因此,随机型固态继电器单独使用,可接通或开断灯光回路; 与移相触发器配合使用,可实现白炽灯的调光。
3 智能照明控制中的人体目标动态定位技术
视频监控图像是三维照明区域场景的二维投影图像,虽然不能完全反应真实的三维场景,但两者之间有一定的投影关系,三维场景发生变化时视频图像也会发生相应的变化。此外,连续视频流的场景具有连续性,若照明区域中没有人体运动,则连续帧图像之间变化很小。反之,人体运动会引起帧差,在照明区域中静止背景下的人体目标动态检测,完全可以采用帧间变化检测( Change Detection) 检测出动态的人体目标。
基于静止背景的人体动态目标检测主要分三个部分: 图像预处理、人体动态目标提取、人体位置判定。
3.1 图像的预处理
由摄像头摄取的照明区域数字图像中包含许多噪声,必须首先进行噪声滤除。噪声的滤除方法很多,中值滤波是一种常用的非线性信号处理技术,它用一个滑动模板在图像上逐点滑动,把模板内各点灰度值大小排序,居中的灰度值作为模板中心点的像素灰度值。该方法对图像中随机噪声有良好的抑制作用,又可以对图像的轮廓和边沿有较好的保护。另外,中值滤波具有对阶跃信号不产生影响,滤波后保持频谱不变以及对图像上的椒盐噪声具有很强的去除作用等特性。
照明区域的数字图像大小为M× N 像素,灰度值为f ( x , y ) , 采用四邻域中值滤波即可满足良好的效果,滤波后的图像灰度值为:

3.2 目标变化检测
当人体目标在监控视场出现或移动时,会使连续帧之间的像素灰度值发生变化,即产生帧差,目标对应区域的帧差比背景区域的帧差大。因此,通过计算帧差大小来判断有无变化产生是目标变化检测常用的一种方法,最简单的算法是采用帧差绝对值法。
对于检测图像序列f ( x , y , t ) , 累计发生变化的像素点数的计算公式为:

式中: Dk 是累计发生变化的像素点数,f ( x , y , t1 )、f( x , y , t 2 ) 分别表示图像序列在t 1、t 2 时刻像素点( x ,y ) 处的灰度值,为邻帧图像光照自适应敏感的添加项,α为抑制系数,N 为检测区域内的像素数目。T 为灰度阈值,其大小决定了动态目标检测的灵敏程度。
存在目标变化的判定条件为:

这里,D 是设定阈值。该方法算法简单,判定条件中考虑了光照条件变化带来的影响,因而对光照变化有一定的适应性,同时还在一定程度上克服了由较小运动目标的干扰而导致的误判,提高了检测的准确性。
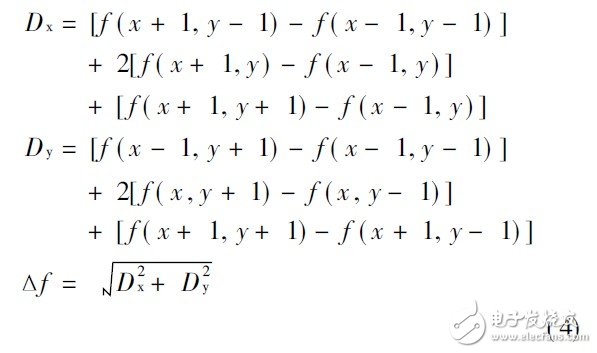
3.3 图像边缘的提取
图像最基本的特征是边缘,而边缘是指图像周围像素灰度变化比较大的那些像素的集合,是进行人体目标检测和分割所依赖的重要依据。图像边缘检测一直是图像处理中的热点和难点,这主要因为边缘和噪声都是高频信号,很难从中取舍。在目前的边缘检测算法中,Sobel 图像边缘检测算法作为经典算法的代表,由于其计算量小,速度快,在很多领域得到了广泛的应用。
由于图像在边缘附近会出现灰度上的突变,所以,Sobel 边缘检测方法就是以原始图像灰度为基础,通过考察图像每个像素在某个领域内灰度的变化,利用边缘邻近的一阶导数最大值来检测边缘。其梯度幅度的数学描述为:
3.4 图像分割和人体位置的判断
采用智能控制的大型照明场合由于存在照明区和非照明区,因此其监控图像往往是具有不均匀背景的图像,对人体目标的特征进行分析时可以发现,整个视场的背景灰度值差距可能很大,因此不能使用单一的阈值进行分割。如果使用单一阈值,由于照明控制区域中背景不均匀,有背景像素的灰度值被分割出来。但事实上人眼之所以能看清目标,是由于在局部范围内目标与背景有一定的灰度差。因此,基于这个原理我们把整个照明监控图像视场分成均等的足够小的部分,则每个部分的灰度变化会较小。首先把整个视场分割成许多相等的小块,对每个小块单独求平均值、最大值、最小值,并计算相应的阈值和阈值差,用各自的阈值对小块进行分割,如果有目标,记下该块中目标的位置、阈值差,当整个视场处理完后,找到各个小块中阈值差最大的目标,作为候选目标点,在该点处进行窗口跟踪,由于窗口已经较小,背景不均匀的影响不大。
人体图形分割出来后,其形心位置的计算可采用以下公式:
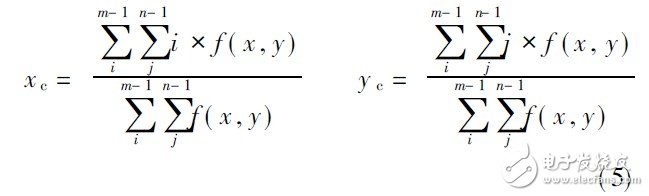
其中,m、n 是窗口的大小,f ( x , y ) 是二值化后的图像。
把被监控的照明投影区域划分成二维数组形式,人体形心位置计算出来后,即可判断出人体图像形心位于二维数组的具体位置,则可以做出相应的照明控制决策,控制与人体位置对应的灯具的开闭和亮度。
4 结论
由于智能照明控制系统的输入信号是从照明区域视频图像中利用数字图像处理技术得到的,输出控制信号则由电力线载波通信PLC Bus 传送,因此,基于目标定位和PLC Bus 技术的智能照明控制系统具有布线简单、系统可靠性高、易于维护的明显特点。
而且控制决策可以设计得非常人性化,对照明器具可实现照度的自动调节、灯的自动开关以及局部有人区域进行照明的控制行为。该系统能提供一个舒适、科学、节约型的照明环境,是先进照明控制的一个重要发展方向。
来源;电子工程网




















 工商网监
工商网监
评论